城市环境下单无人机测向定位航迹优化算法*
2022-12-02陈方正郝绍杰
陈方正,郝绍杰
(中国电子科技集团公司第四十一研究所, 山东 青岛 266555)
近年来随着机载电子设备的小型化,将无人机(unmanned aerial vehicles,UAV)作为机动观测平台,搭载测向设备对敌方目标进行探测定位成为重要的发展方向。机动单站测向定位是指单个观测站通过机动,在不同位置测得目标方位角信息并结合某种估计算法实现对目标的快速定位和跟踪[1]。利用UAV等单观测站进行测向定位航迹优化问题的本质是研究如何通过优化观测平台的运动轨迹来提升对目标预测的可观测性问题[2-5]。然而以往这些研究大多基于理想飞行空间,缺乏复杂环境因素对优化航迹影响的考量。因此近年来,结合飞行环境因素进行测向定位航迹优化成为研究的热点。其中,文献[6-7]在飞行环境中引入了威胁模型,文献[8]则研究了飞行环境中的静、动障碍和雷达探测对定位航迹的影响。不过这些环境模型通常较为简单,距离实用仍有一定差距,并且没有考虑环境对电磁信号传播的影响,从而限制了其实际应用,特别是在复杂城市环境中的应用。
在城市环境中,大量建筑物的存在将会对目标形成遮挡和空域限制,使得对城市环境中的目标定位和跟踪成为一个极具挑战性的课题。美国空军研究实验室的COUNTER(cooperative operations in urban terrain)项目开展了协同多UAV实现对城市环境中目标侦查和跟踪的研究[9]。Shaferman等考虑城市环境中的空域限制和地形遮挡,以目标观测总时间为评价函数,使用遗传算法求解多架UAV对目标跟踪的协同规划问题,但是该方法为一种离线规划方法,并且假设目标运动规律已知[10]。王林等提出一种基于主动感知的多UAV协作式目标跟踪问题求解框架,采用分布式无色信息滤波实现融合目标状态估计和预测,根据城市地物信息计算目标可视区域,结合随机搜索与滚动时域控制实现城市环境中多UAV在线协同目标跟踪[11]。Yu等假设目标运动为Markov过程,实现了使用UAV和无人车协同跟踪城市中的运动目标[12]。Yao等考虑城市环境中的遮挡、空间约束、UAV动力学约束及其探测范围等约束,基于模型预测控制框架,求解多UAV协同跟踪目标的问题[13]。Oh等根据目标估计位置计算三维视距(line-of-sight, LOS)通信区域,作为UAV盘旋区域,保证了已知合作目标在城市中运动时与UAV之间保持无遮挡[14]。Bhagat等提出一种基于深度强化学习的目标跟踪算法,实现单UAV在城市环境中跟踪运动目标,并考虑了目标运动的随机性[15]。胡超芳等考虑建筑物对无人机视线的遮挡等因素,采用基于分布式预测控制的模糊多目标航迹规划方法解决城市环境中多无人机协同追踪地面目标问题[16-17]。刘大千等针对未知城市环境下的目标搜索问题,构建了基于信息共享代价和区域覆盖收益的协同优化模型,利用群智能方法求解,使得平均目标发现成功率和区域覆盖率均有明显提升[18]。但是在上述研究中,UAV通常采用光电设备对目标进行探测和跟踪,目标在UAV探测视场内即认为满足观测要求。而对于城市环境中辐射源目标的定位问题来说,由于建筑物对电磁信号存在反射、绕射和散射效应,城市环境中电磁信号传播存在显著的LOS和非视距(non-line-of-sight, NLOS)信号混合的情况,存在多径干扰,严重降低定位算法的性能和精度[19]。目前无论采用何种定位体制,针对LOS/NLOS混合环境下对辐射源目标的定位问题,常见的手段仍是从数据处理的角度入手,主要包括NLOS鉴别与消除方法[20-21]、基于NLOS传播模型的方法[1,22-23]、基于射线跟踪的定位方法[24]以及间接滤波方法[25-26]等。然而目前不管采用何种方法,由于NLOS引起的参数估计误差受实际环境影响较大,所以并不存在普适的算法完全消除NLOS误差。文献[27]考虑全球定位系统(global positioning system,GPS)卫星信号在城市中的多径效应对其定位误差的影响,规划UAV航迹时考虑选择定位精度较高的区域,为城市环境中单UAV测向定位航迹优化提供了思路。
因此,本文针对城市环境中辐射源目标的测向定位问题,提出了基于环境预测的单站测向定位航迹优化算法,以单架UAV作为机动平台,基于滚动时域控制框架,在线生成满足UAV运动学约束的预测航迹,根据当前估计目标位置和已知环境信息,预测信号遮挡区和NLOS信号干扰区,构建预测航迹评价函数,使UAV尽量在无遮挡和干扰的空域内进行测向定位飞行,以改善测向信号的质量和连续性,同时考虑躲避建筑障碍,进而从全新的角度解决单架UAV在复杂城市环境下的精确测向定位问题。
1 城市环境测向定位问题描述
1.1 机动单UAV测向定位问题描述
三维空间中单UAV测向定位示意图如图1所示。其中Oxyz为地面惯性坐标系;XT=[xT,yT,zT]T为待定位目标;XU,k=[xU,k,yU,k,zU,k,ψU,k]T为UAV状态向量,Vk为其速度矢量,下标k为时间步,ηk为其观测的XT的方位角。
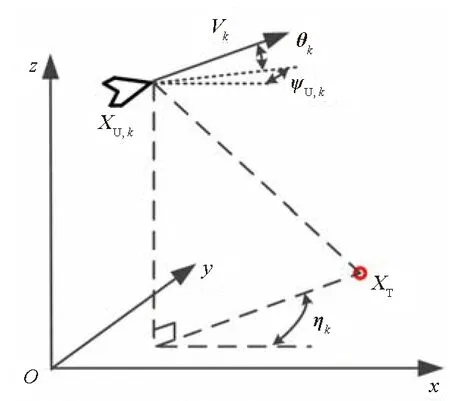
图1 测向定位示意图Fig.1 Illustration for bearings-only target localization
UAV离散形式运动学模型为:
(1)

在本文中,假设XT位于地面且静止,即zT=0 m,UAV仅能测量XT的方位角ηk,不考虑过程噪声,选取XT=[xT,yT]T为待估计的状态变量,则由图1可知,理想观测环境下UAV对XT的方位观测方程可表示为:
(2)
式中,εk是均值为μ、方差为σ2的高斯白噪声序列。
1.2 城市环境中测向定位面临的问题
1.2.1 建筑物对飞行空域的限制
UAV在城市环境中安全飞行,首先需要保证的是其不能与建筑物等障碍物发生碰撞。本文中使用几何体表示建筑物,UAV在飞行过程中时刻需要对这些建筑物进行躲避,避免与其相撞,即满足:
(3)
式中,ABuild为建筑物占据总空间,Bj为第j个障碍物占据的三维空间,Q为障碍物总数量。此外,对于小型UAV来说,受其性能影响,其最大飞行高度有限,从安全角度考虑飞行高度也不宜过低,因此需将其飞行高度限制在一定范围内,即满足:
hmin≤zU,k≤hmax
(4)
式中,hmin、hmax分别为UAV最小、最大飞行高度。
1.2.2 建筑物对电磁信号传播的影响
本文仅考虑建筑物对电磁信号的遮挡和反射效应,基于射线追踪法[28]计算信号传播路径。为表示直观,以二维形式表示,如图2所示,容易推广到三维空间。当UAV处于X′U,k位置时,受建筑物遮挡,此时UAV无法接收到由XT发出的电磁信号,因而无法测量XT方位。所有XT受到遮挡的位置集合称为信号遮挡区,表示为AShadow。根据文献[29],多径现象干扰的原理为:当UAV处于XU,k位置时,XT发射的电磁信号经由建筑物反射形成NLOS信号,与LOS信号叠加,使UAV测量的ηk偏离实际值,进而产生多径干扰,影响UAV测向定位的精度。
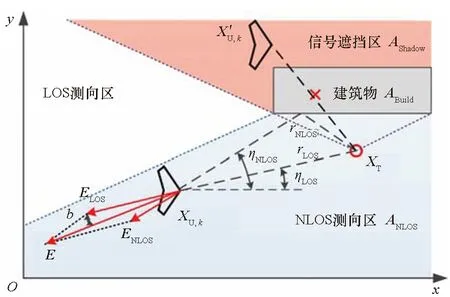
图2 建筑物对电磁信号传播的影响Fig.2 Influence of buildings on electromagnetic signal propagation
叠加信号的场强矢量由式(5)计算[29]。
(5)
式中,ELOS为LOS信号场强矢量,ENLOS,i为第i路NLOS信号场强矢量,M为NLOS信号路径个数。场强大小计算如式(6)所示。
(6)
式中,P为天线发射功率,DLOS和DNLOS,i分别为天线在各路径方向的方向性系数,rLOS为LOS路径距离,rNLOS,i为NLOS路径距离,R2为反射面对电磁信号的反射率。 所有存在NLOS信号的位置集合称为信号反射区,表示为ANLOS。
采用参考文献[28]所述的射线追踪法计算AShadow和ANLOS。 为了简化算法,电磁信号的传播仅考虑一次反射。AShadow计算如式(7)所示。
(7)
其中,AShadow,s为XT关于建筑可见墙面s的信号遮挡区,是由顶点围成的多面体,根据射线传播原理,其顶点坐标为:
Xshadow,s={X|X=Xs,i,X=l(Xs,i-XT),i=1,2,3,4}
(8)
式中:Xs,i为墙面s的第i个顶点坐标;l为比例因子,为使AShadow影响距离足够远,令l=50。同理,ANLOS由式(9)计算:
(9)
其中,ANLOS,s为墙面s的信号反射区,也是由顶点围成的多面体,其顶点坐标为:
XNLOS,s={X|X=Xs,i,X=l(Xs,i-X′T,s),i=1,2,3,4}
(10)
式中,X′T,s为XT关于墙面s的镜像点,根据空间几何容易得到。
2 基于环境预测的单UAV测向定位航迹优化算法
本文从LOS/NLOS混合环境下定位算法和基于环境预测的航迹优化算法两个方面解决UAV在城市环境中对辐射源目标定位的问题。
2.1 LOS/NLOS混合环境下定位算法
交互多模型(interacting multiple model,IMM)与滤波技术相结合,可改善LOS/NLOS混合环境下的定位算法性能[30]。IMM算法无须对LOS/NLOS进行鉴别,而是通过滤波模型的模型概率对LOS/NLOS进行概率估计,进而加权融合,在一定程度上避免了基于鉴别的算法中鉴别不准引起的误差[31]。通常可以近似认为NLOS信号与LOS信号在噪声特性上不同[30],因此本文采用IMM算法框架和扩展卡尔曼滤波(extended Kalman filter, EKF)结合的IMM-EKF算法,通过对LOS和NLOS条件下观测噪声模型的改造,实现定位过程中多模型的融合和自适应调整,改善LOS/NLOS混合环境下的测向定位算法的稳定性。IMM-EKF算法流程参见文献[25]。由于目标静止,本文中各EKF滤波器均采用相同的预测模型,但是对于不同的观测信号状态,采用不同的观测噪声模型,如式(11)~(12)所示。
(11)
(12)

2.2 基于环境预测的航迹规划算法原理
UAV在城市环境中飞行并对电磁辐射源目标XT进行测向定位时,首先要保证其不与建筑发生碰撞,其次需要XT与UAV之间保持LOS,同时需要尽量减小NLOS信号对测向精度的影响,才能确保最终定位的精度。然而在XT未知的前提下,单架UAV仅依赖实际测量数据难以获得整个城市环境中的电磁场分布,无法选择有利的位置进行测向,并且由于NLOS信号引起的观测误差受实际环境影响较大,单纯从数据处理着手无法完全消除NLOS信号带来的估计误差。实际上由于建筑物尺寸是有限的,因此其对信号的遮挡和反射的影响区域也是有限的,在城市环境中总是存在较为理想的LOS信号区域,UAV在该区域内测向精度较高。

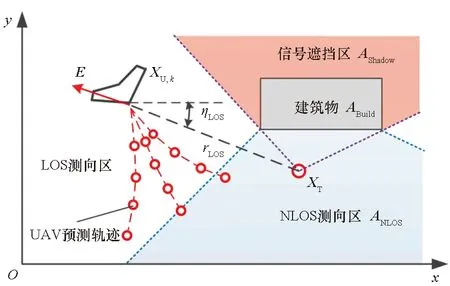
图3 基于环境预测的单UAV测向定位航迹优化示意图Fig.3 Trajectory optimization illustration of single UAV for bearings-only target localization based on environmental prediction
本文以Fisher信息矩阵(Fisher information matrix, FIM)行列式最大作为UAV测向定位航迹优化的准则以提高对XT的定位精度。文献[32]推导了无过程噪声条件下FIM的递推计算方法:
(13)
式中,Φk+1|k为XT状态转移矩阵,XT静止,故
(14)
FIMk为Fisher信息矩阵,Rk为观测噪声序列εk的协方差矩阵,Hk为观测方程h(·) 的雅可比矩阵,表达式为
(15)

(16)
(17)

UAV应尽量避免进入ABuild和AShadow区域。因此采用式(18)所述评价函数,以未进入上述区域的最大预步数为评价函数。
(18)
UAV可以进入NLOS测向区,但是NLOS导致的多径干扰会影响UAV测向定位的精度,因此应尽量减少在ANLOS中的停留时间,评价函数如式(19)所示。
(19)
综合考虑定位、避障、信号遮挡和信号多径干扰等因素,一条航迹的总评价函数为:
Jp=c1JFIM,p+c2JT,p+c3JNLOS,p
(20)

J=[J1,J2,…,Jp]T
(21)
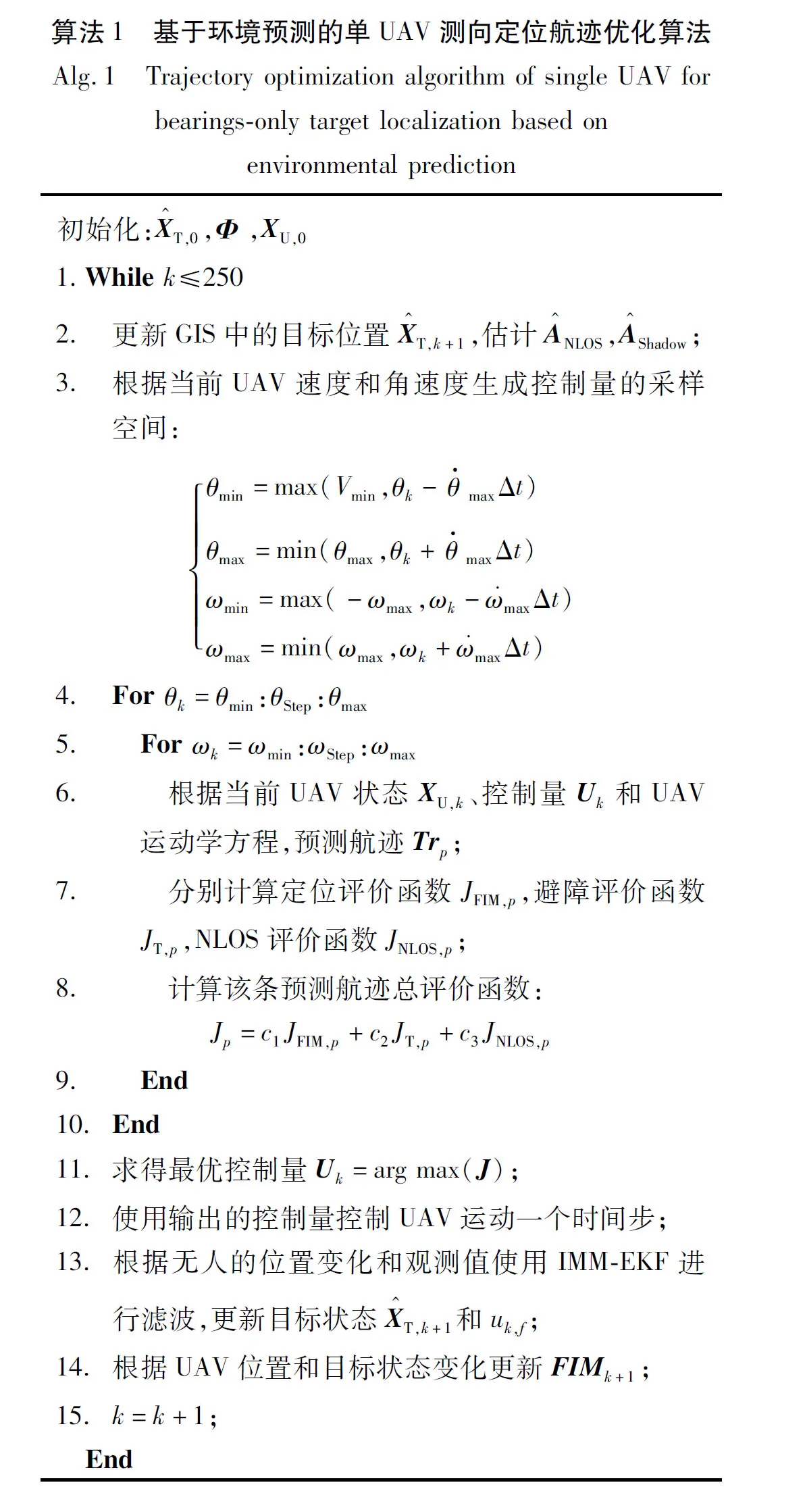
具体算法流程如算法1所示。

O(B)+O(1)+O(S2(n+nB+1))+O(S2)=O(S2nB)
(22)
由式(22)可知,本文算法复杂度对于S、n和B来说属于多项式复杂度,虽问题规模增加,但时间非爆炸式增长。
3 算法仿真验证


(23)

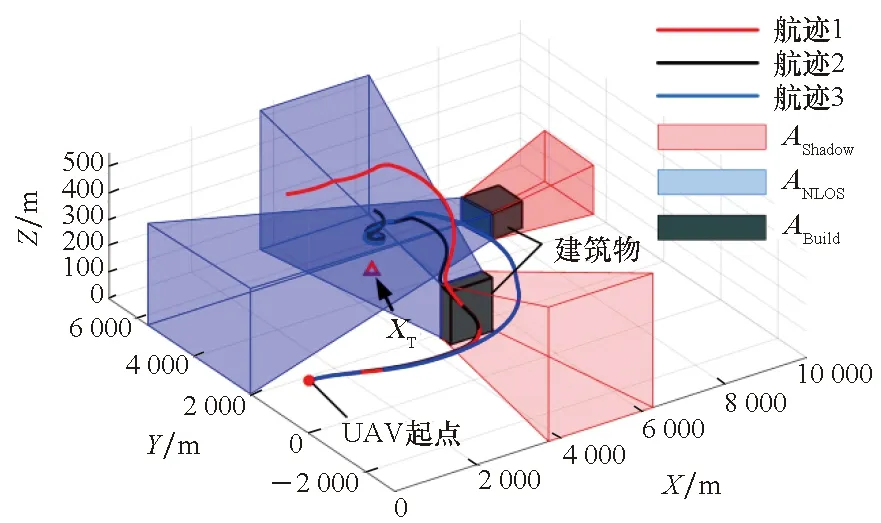
图4 航迹对比Fig.4 Flight path comparison
三种航迹最终定位精度如表1所示,其中航迹1评价函数最为全面,定位精度最高。图4为UAV某次定位航迹,图中AShadow和ANLOS根据XT实际位置计算,图5为平均定位误差收敛过程。由图4和图5可知,由于航迹3只考虑了定位评价因素,UAV在定位过程中首先进入AShadow,导致XT被遮挡,此时滤波算法不再更新,RMSEk保持固定值(80≤k≤120)。航迹3的末端进入ANLOS,由于NLOS信号的干扰,UAV最终定位精度受到一定程度的影响。航迹2添加了JT,p评价因素,使得UAV在飞行过程中通过机动避开了AShadow,有效改善了XT被遮挡的问题,并且在机动过程中没有与建筑物发生碰撞,同时说明了避障约束的有效性。但是UAV沿航迹2飞行,更早地进入ANLOS,在ANLOS中不同位置NLOS信号的干扰强度也不尽相同,航迹2相比于航迹3定位精度受到NLOS信号更强烈的影响, IMM-EKF滤波器虽然不致发散但是导致航迹2末段RMSEk不降反升,误差最大。航迹1由于考虑了JT,p、JNLOS,p评价因素,因此在飞行定位过程中,首先类似于航迹2通过机动避开了ABuild和AShadow,保持XT未被遮挡,同时也避免了UAV在航迹末端进入ANLOS,进而使其不受到NLOS信号的影响,因此最终定位精度最高。

图5 平均定位误差收敛过程Fig.5 Convergence process of RMSE
4 结论
本文针对城市复杂环境下的单UAV对辐射源目标的测向定位问题,提出了一种基于环境预测的定位航迹优化算法。该方法以单架UAV作为机动观测平台,使用IMM-EKF滤波改善LOS/NLOS混合环境下目标估计算法的稳定性,基于滚动时域控制框架生成满足UAV运动学约束的预测轨迹,以Fisher信息矩阵行列式最大为定位准则,同时基于当前估计的目标位置和城市环境模型,预测信号遮挡区域和NLOS干扰区域,并对UAV预测航迹进行评价,生成最优控制指令,控制UAV尽量在无遮挡和干扰的空域内进行测向定位飞行,进而改善测向信号的质量和连续性,提高定位精度。仿真结果表明,本文所述算法能够有效解决城市环境中测向定位面临的避障、目标遮挡和NLOS信号干扰问题,使UAV在复杂的城市环境下依然能够完成高精度测向定位任务。
