设施蔬菜生产无人化开沟施肥机控制系统研究*
2022-12-02吴丹戴有华刘永华金文忻
吴丹,戴有华,刘永华,金文忻
(江苏农林职业技术学院,江苏镇江,212400)
0 引言
江苏省是全国蔬菜生产大省之一,2020年全省蔬菜种植面积为1 444 khm2,比2019年增加1.9 khm2。随着蔬菜产量的不断上升,蔬菜产业存在的用工难、用工贵、劳动强度大、作业效率低、农机农艺融合不够等突出问题也越来越明显[1]。因此,积极推进蔬菜生产机械化,促进蔬菜生产全面高质量发展近几年受到空前关注[2-4]。本项目针对设施蔬菜生产设计了自走式开沟施肥一体机,集自走、开沟、施肥、覆土于一体,节省了施种成本。
目前开沟施肥机主要是应用于果园生产,用于设施蔬菜生产的几乎没有[5],景子奇等采用单片机开发的果园开沟施肥机控制系统心,通过控制开沟刀盘升降油缸和排肥门开度实现开沟深度和施肥量的实时调节,控制系统性能稳定,能适应复杂环境;张宏建等[6]开发了基于STM32F103的自动调节深度式果园双行开沟施肥机控制系统,能实现开沟深度的自动调节。本项目在吸取果园开沟施肥机设计经验的基础上,结合设施蔬菜开沟施肥特点,农机结合农艺,开发出自走式开沟施肥机的控制系统。
1 开沟施肥机控制系统方案设计
如图1所示的无人化开沟施肥机,控制系统采用PLC作为主控制器,其中无人自走控制主要由动力平台完成,包括发动机、液压泵、液压马达、液压转向电磁阀、超声波传感器等;精准施肥控制主要由施肥部件完成,包括碎肥电机、施肥量控制电机等;开沟控制主要由作业部件完成,包括开沟机机架控制电机、开沟部件升降电机及相关限位开关等实现。

图1 开沟施肥机示意图
PLC控制系统主要由低压元器件、相关执行元件和西门子S7-200 SMART PLC组成,其中相关执行元件在开沟施肥机中的作用见表1。
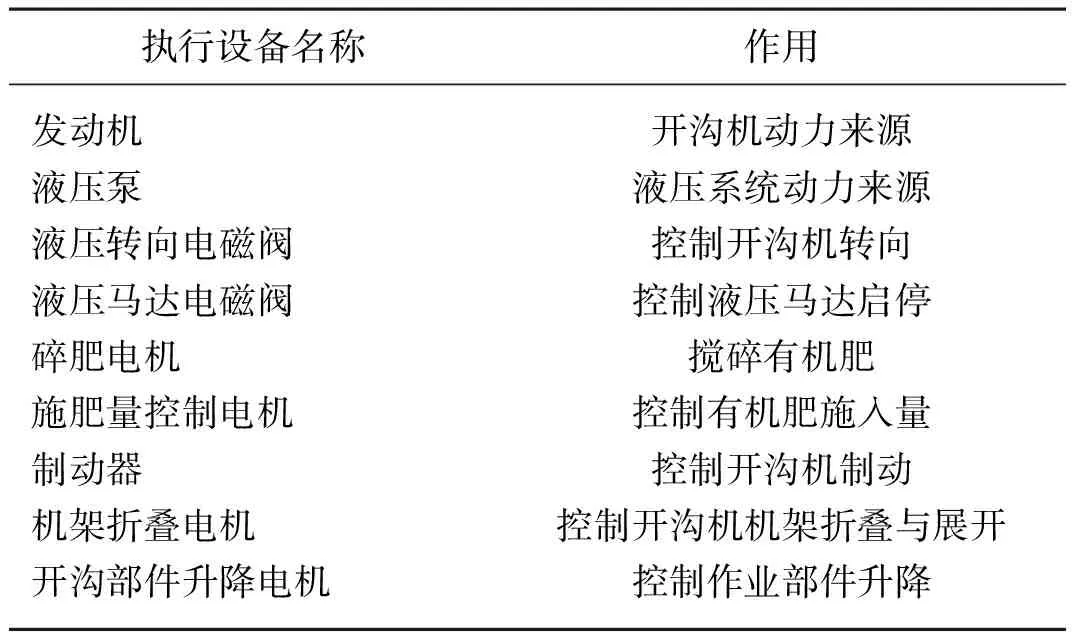
表1 开沟施肥机控制系统主要执行元件及作用Tab. 1 Main executive components and functions of the control system of the ditching fertilizer applicator
开沟施肥机在进行开沟作业时,总体要求开沟速度平稳,施肥精确。据此,总结出开沟施肥机的控制系统需求如下。
1) 开沟施肥机行走路径如图2所示,作业部件中的开沟施肥铲并排设置8个,因此开沟机行走一个来回可以开沟施肥16路。本文以小型设施蔬菜大棚为例,开沟施肥机只需行走一个来回,若是大型蔬菜大棚,开沟施肥机需走多个来回。
2) 发动机采用传统柴油发动机,但是加装启动按钮,液压泵和发动机共用一个启动按钮。
3) 开沟施肥机转向由液压转向电磁阀控制,分左转和右转,由超声波传感器进行转向到位检测。
4) 液压马达驱动后轮行驶,安装电磁阀,由电磁阀控制其通断。
5) 肥料箱中的碎肥电机采用变频器控制。
6) 施肥采用变量施肥,施肥量多少由步进电机来精确控制,施肥量需要根据开沟速度和设施蔬菜种类确定不同的施肥量,开沟速度用速度传感器来测量。
7) 制动器的启停采用电磁阀控制。
8) 机架折叠电机采用电机的正反转来实现机架的折叠与展开,同时安装折叠到位限位开关和展开到位限位开关。
9) 开沟深度控制采用升降电机完成,在开沟作业部件底端加装距离传感器,实时测量开沟深度。
10) 上述内容除可以自动控制外,也可以进行手动控制。

图2 开沟施肥机行走示意图
2 PLC控制系统软硬件设计
2.1 PLC硬件设计
根据控制需求,硬件部分包括整个系统的主控制器S7-200 SMART PLC、按钮开关、继电器、传感器、限位开关、变频器、电磁阀和执行机构组成。其中超声波传感器选择JUB2000-30GM-U-V15,检测距离最大可达2 m;速度传感器距离传感器均选择GT38DQS1非接触式绝对值多圈角位移编码器,经过换算可以分别得到速度值和距离值。控制系统的框架如图3所示。
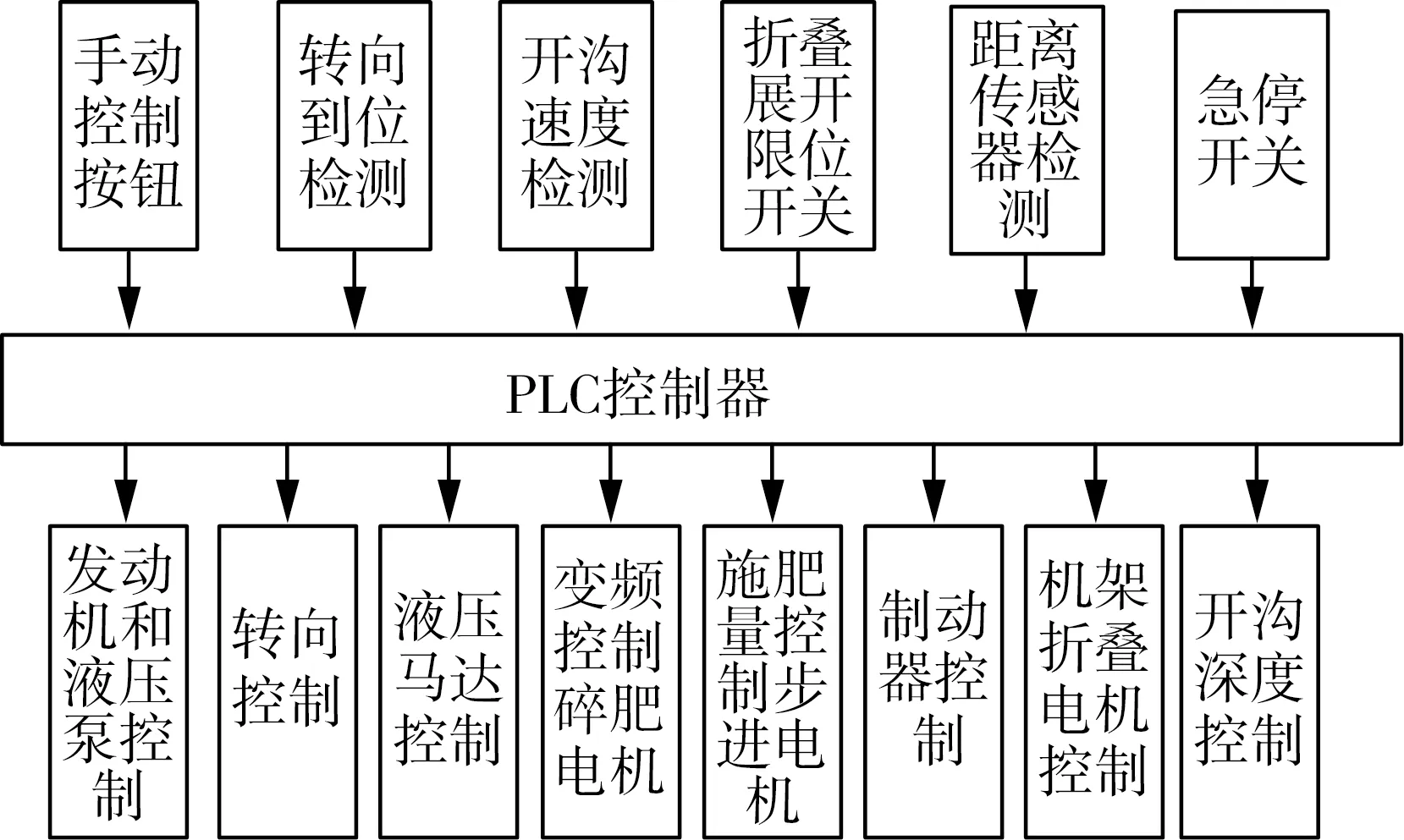
图3 控制系统框架
本系统在硬件设计时考虑手动控制需求和系统的安全性能,为每个执行设备分配了各自的启停按钮,并安装了急停按钮。系统的I/O分配表如表2所示。

表2 I/O分配表Tab. 2 I/O allocation table
2.2 PLC软件设计
软件采用STEP 7-Micro/WIN SMART编程软件,是西门子公司专门为S7-200 SMART PLC设计的编程软件。根据控制需求,系统进入自动程序运行时,首先默认转向系统处于停止状态,机架已折叠到位。以图2中开沟施肥机行走一个来回为例。
1) 按下自动运行按钮,发动机和液压泵启动,紧接着液压折叠机架开始展开,展开到位后,液压马达启动,开沟施肥机准备开始进行开沟作业;此时碎肥电机启动已有一段时间,通过经验总结此时肥料已被打碎。
2) 开沟施肥机开始作业前关闭碎肥电机,开沟开始后根据开沟速度实时调整肥料用量。具体方法是:通过速度传感器检测开沟施肥机的行走速度,将检测信号实时反馈到PLC,PLC通过控制步进电机的脉冲数达到控制步进电机精确转动的目的,从而控制施肥阀门的开度。
3) 开沟施肥机在运行过程中利用距离传感器实时检测开沟深度,保证深度维持在20 cm左右。
4) 直至开沟施肥机运行至大棚对面,前方超声波传感器接收到信号,开沟施肥机开始右转;在右转过程中,左侧超声波传感器会慢慢收到信号,等到左侧超声波传感器信号消失后表明转向已完成,此时关闭右转向电磁阀。
5) 开沟施肥机继续往回运行,当运行靠近大棚时,前方超声波传感器再次接收到信号,此时启动制动器,使开沟施肥机停止运行。到此,一个来回的开沟施肥作业全部完成。
开沟施肥机控制系统流程如图4所示。

图4 开沟施肥机控制系统流程
3 自适应Fuzzy-PID变量施肥控制算法
3.1 自适应Fuzzy-PID结构
在施肥作业过程中,应保证单位面积的施肥量是恒定的,过多或过少的施肥量都会影响蔬菜的生长。但是由于在实际开沟作业中,土质不能保证均匀恒定,造成开沟速度的非线性问题。为此,本文采用变量施肥方法,根据开沟速度实时进行施肥量的调整,以达到精准施肥的目的[7]。
常规PID控制算法中的比例系数kp、积分时间常数ki、微分时间常数kd不变,适用于干扰较小的系统。Fuzzy-PID控制是将模糊技术与常规PID控制算法相结合,当施药量偏差较大时采用模糊控制,响应速度快,动态性能好;当施药量偏差较小时采用PID控制,静态性能好,能达到较高的控制精度。而自适应Fuzzy-PID控制是通过智能化的方法对Fuzzy-PID的参数进行自动调整,以达到最优控制的目的[8-10]。
图5为Fuzzy-PID控制系统原理图[11],以目标阀门开度与实际阀门开度的偏差e及偏差变化率ec为模糊控制器的输入,以Δkp、Δki、Δkd为模糊控制的输出,三个修正量作为PID控制器的输入,用来控制步进电机的脉冲,从而达到控制施肥量的目的。
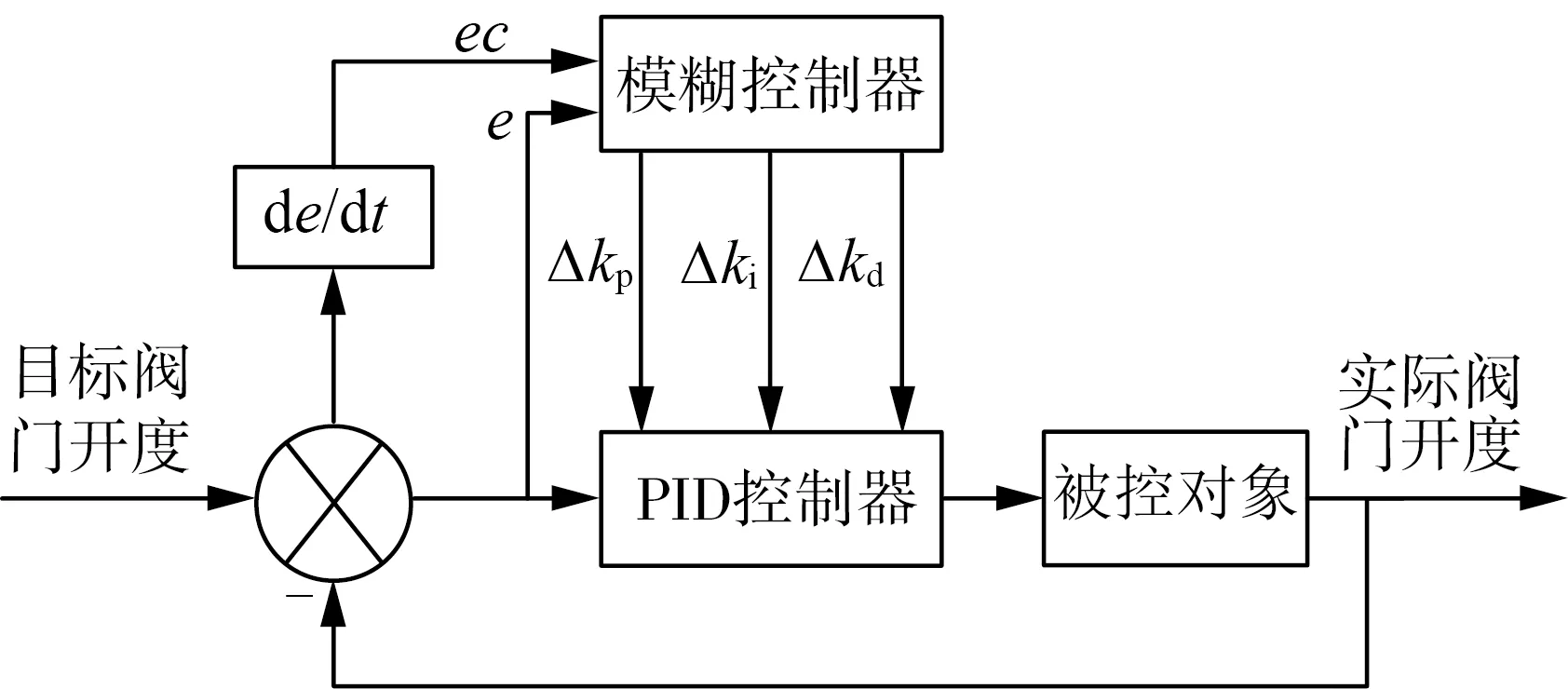
图5 自适应Fuzzy-PID控制系统原理图
3.2 自适应Fuzzy-PID设计
首先进行变量的模糊化处理[12]。设定偏差e和偏差变化率ec的论域为[-3,3],Δkp、Δki的论域均为[-6,6],Δkd的论域均为[-1,5]。将模糊变量设定为7个,为{负大NB,负中NM,负小NS,零ZO,正小PS,正中PM,正大PB}。输入和输出隶属度函数曲线如图6所示。
其次进行模糊控制规则的制定[12-14]。根据经验,制定如表3的控制规则,对应控制规则的Δkp、Δki、Δkd的曲面如图7所示。

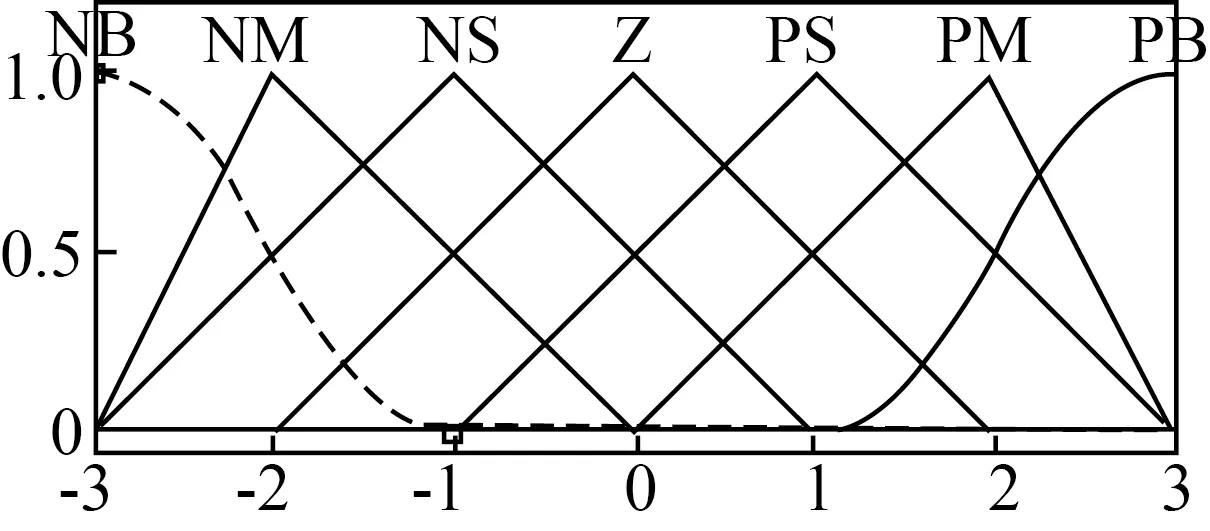
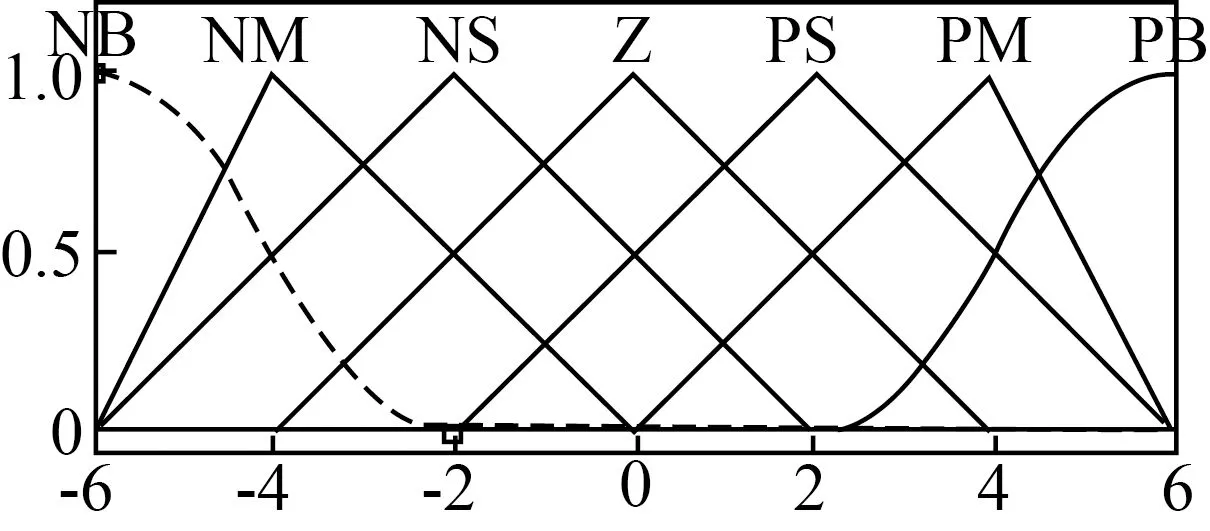
(a) input variable “e” (b) input variable “ec” (c) output variable “kp”


(d) output variable “ki” (e) output variable “kd”
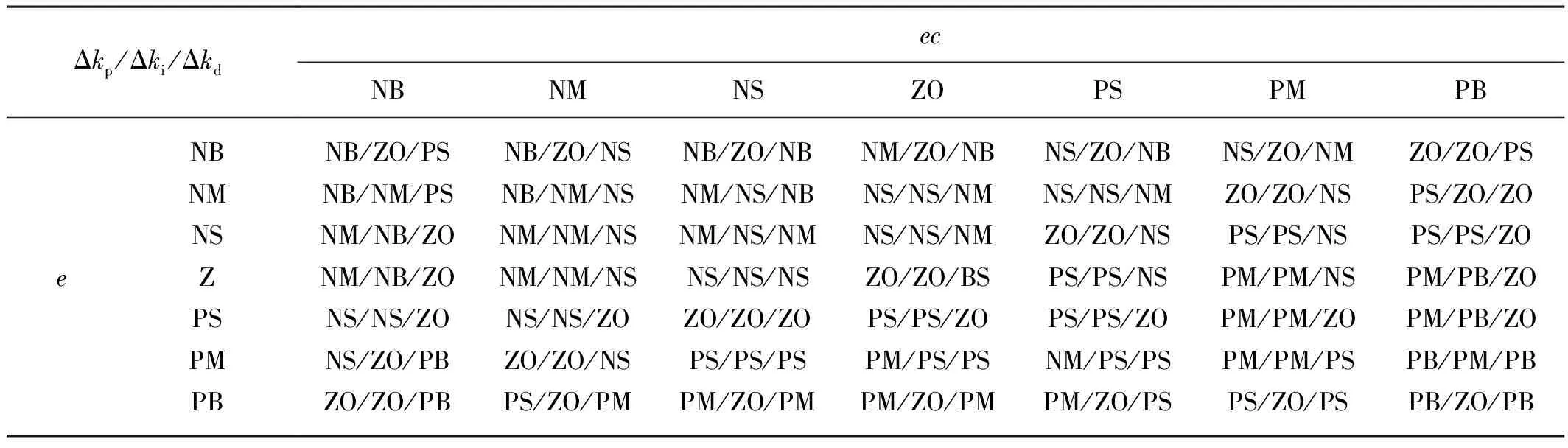
表3 Δkp、Δki、Δkd的模糊规则表Tab. 3 Fuzzy rule table of Δkp、Δki、Δkd



图7 Δkp、Δki、Δkd的模糊规则曲面图
3.3 自适应Fuzzy-PID仿真
在进行仿真前,首先确定被控对象。由于施药量的多少是通过步进电机控制阀门来实现的,步进电机的传递函数
本文采用普菲德的两项混合式步进电机,型号为86BYG250C。根据其技术参数可以得出:齿数Zr为50;相电感L1为7.1 mH;A相电流iA为6 A;转子惯量J为3.57 kg·cm2;粘滞阻尼系数D估算为0.1。
将相关参数代入可以得到步进电机的传递函数
其次进行PID参数整定[15-17],即整定kp、ki、kd值。本文在Siumlink中建立PID的仿真模型(图8),利用PID模块中的Tune功能得到初始参数,再在此基础上根据经验进行参数再调整,最终得到kp=3.930、ki=10.336、kd=1.277。
最后进行Fuzzy-PID仿真,见图9,仿真波形如图10所示。

图8 PID控制仿真图
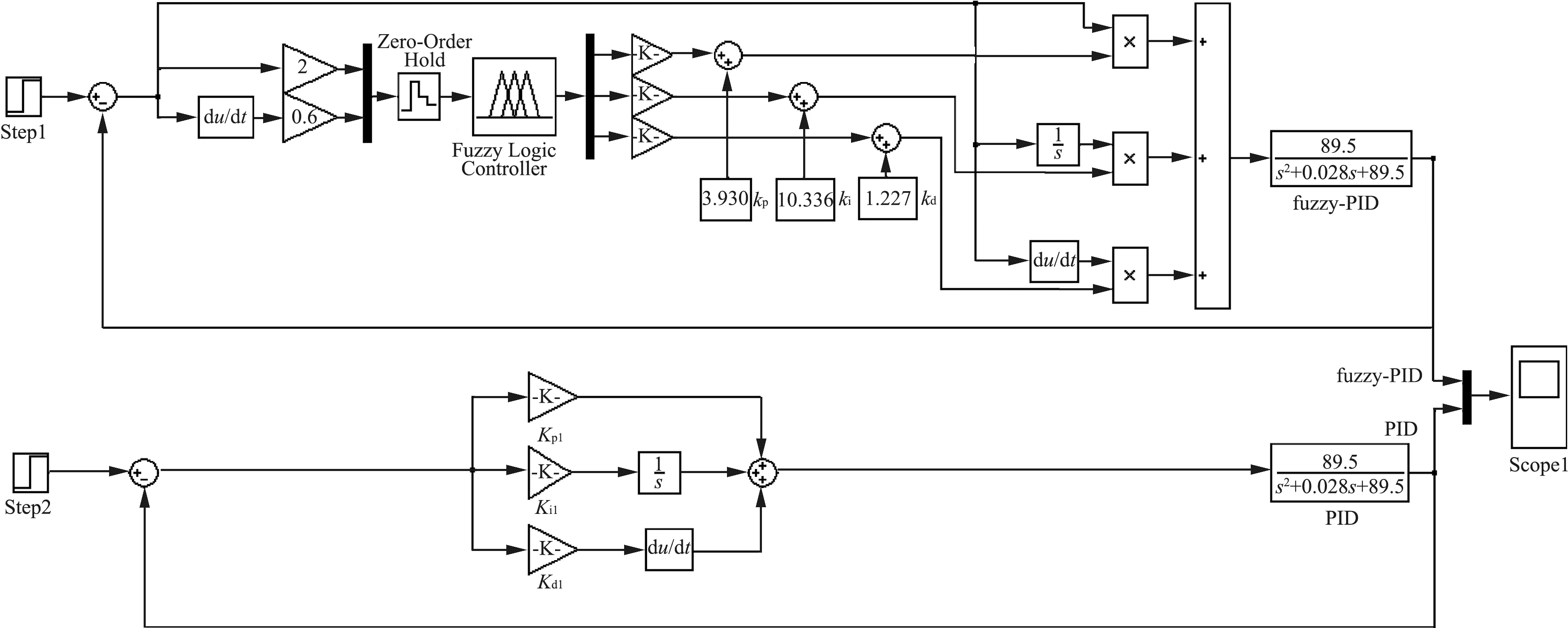
图9 自适应Fuzzy-PID和PID控制仿真图
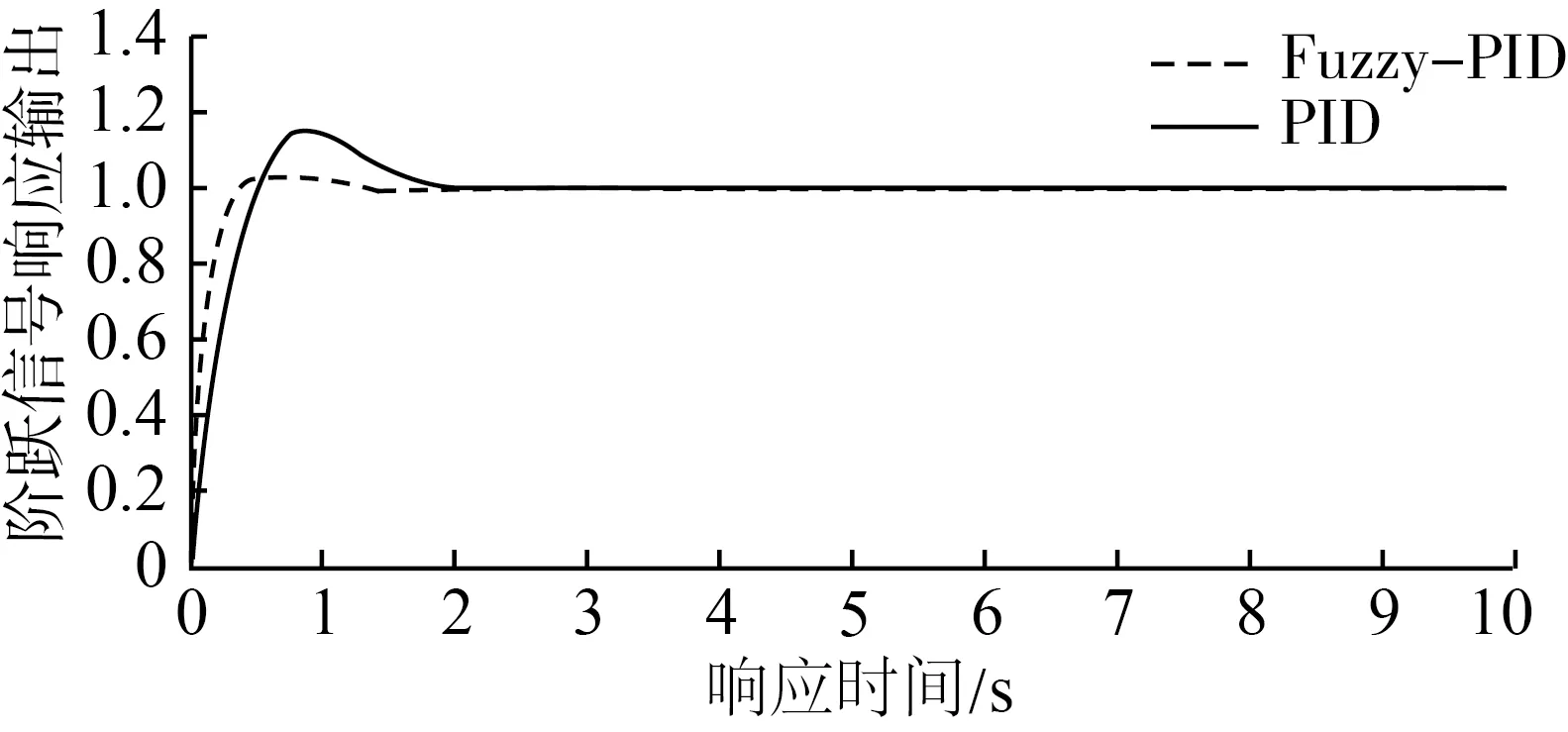
图10 自适应Fuzzy-PID和PID控制仿真曲线
3.4 仿真结果对比分析
由图10可以看出,在单位阶跃信号输入的情况下,调节时间按达到稳态误差的±2%以内计算,自适应Fuzzy-PID控制和PID控制的参数对比如表4所示。
由表4可以得出,自适应Fuzzy-PID比PID控制的调节时间缩短35%;超调量减小81%,故自适应Fuzzy-PID的控制效果优于比PID控制,能满足精准施肥的要求。

表4 自适应Fuzzy-PID和PID的参数对比Tab. 4 Comparison of parameters between adaptive Fuzzy-PID and PID
4 现场试验
为验证本文开沟施肥机控制系统的稳定性,在江苏省句容市某蔬菜温室大棚进行了开沟深度试验和施肥量均匀性试验。
由于开沟施肥铲能一次性开8条沟,因此一排8个开沟点算作为一个测试点,开沟施肥机在温室大棚共走2个来回,试验随机取10个测试点。开沟深度设置为20 cm,8个开沟点实际深度用卷尺完成测量,取一平均数。肥料采用小颗粒状有机肥以便后期收集进行称重,开沟施肥机以变速进行开沟以便验证每个测试点的施肥量是否均匀,每个测试点的肥料量设置为5 g,8个开沟点的肥料收集完成后取总数。
在开沟施肥机完成一次来回作业后,进行各项参数的测定,试验结果如表5所示。

表5 开沟深度和施肥量试验结果Tab. 5 Test results of trenching depth and fertilization rate
从表5可以看出,开沟深度最大相对误差为7.5%,开沟深度基本在(20±1) cm范围内,开沟深度控制效果良好,满足开沟要求。施肥量最大相对误差14%,施肥量在6 g范围内,满足精准施肥要求。
5 结论
1) 本文设计了一种专用于设施蔬菜生产的开沟施肥一体机控制系统,采用S7-200 SMART PLC作为主控制器完成开沟施肥一体机的自走、无人化开沟和施肥。利用机身前、左、右的超声波传感器完成机器的转向;利用距离传感器完成开沟深度的测量;利用速度传感器和步进电机实现精准施肥。
2) 针对开沟施肥时自走速度非线性的问题,提出了自适应Fuzzy-PID的变量施肥模型,通过仿真可得自适应Fuzzy-PID比PID控制的调节时间缩短35%;超调量减小81%,故自适应Fuzzy-PID 的控制效果优于比PID控制,能满足精准施肥的要求。
3) 通过开沟深度试验和施肥量均匀性试验得到,开沟深度最大相对误差为7.5%,平均相对误差为1.2%,施肥量最大相对误差14%,平均相对误差为6.6%,误差均在允许范围内。由此可得,开沟施肥机的控制系统在开沟试验时开沟深度能满足开沟控制系统要求,并且控制系统稳定性好,控制精度高,值得生产和推广应用。