基于无功电流自适应下垂系数控制的多微网调度与控制协调运行
2022-12-01吕智林
周 林,吕智林,刘 斌
(广西大学电气工程学院,广西壮族自治区南宁 530004)
0 引言
随着微电网技术的革新,规模逐渐扩大,将多个微电网连接在一起,使其在一定的区域内形成微网群[1-2]。与单个微电网相比,微网群有效地提升了系统的可靠性[3-5]。
文献[6]中,针对直流多微网的控制提出了一系列方案,但对于日常生活中,直流微电网需要转化为交流方可使用。相比于直流微网,交流微网需要控制频率、相位和无功功率,这也提升了交流微网的设计难度。在交流微网中,传统下垂控制在孤岛模式下为微网系统提供电压和频率支撑,不存在任何的通信,但是分布式电源(Distributed Generator,DG)之间不能准确的分配无功功率,并且电压和频率存在偏差,这就需要使用分层控制来解决[7]。分层控制主要有两种模式,采用中央处理器的集中式和分布式。文献[8]提出一种多层控制算法体系结构,通过中央控制器统一协调下级控制。多微网除了能够独自运行外,也可以连接到配电网中。当多微网系统从配电网中脱离时,孤岛微电网的电压和频率会受到影响。为了解决这一问题,文献[9]提出了一种采用中央处理器的多微网控制方案,解决了配电网和孤岛微电网间的功率交换。文献[10]针对多微网协调问题提出了多级代理系统控制方案。但是文献[8-10]中所提到的控制方法由于采用了中央控制器,所以对于系统可靠性的要求非常的高,一旦中央处理器发生意外,系统就处于瘫痪状态。
相比于采用集中化控制的缺点,分布式控制的每个单元都依据自身和相邻单元的控制信息来运行,不依赖中央控制器,有着独立性高、易扩展等特点。目前针对分布式微网的研究已经有了一定的成果。文献[11-13]采用了分级控制,很好的实现了控制目标,但是都并没有将系统扩展到多微网层面上。文献[14-15]提出将多微网中所有的DG 看成是对等的,多微网中所有的DG 在统一层面上进行通信,这就意味着系统是由非常多的DG 组成的单个微电网。为了解决这一问题,文献[16]提出一种微网群分层控制方案,该方案在每个(Microgrids,MG)中设置一个通信代理,通信代理基于图论来获得相邻MG 的信息。但是该方法过于依赖通信代理。文献[17-18]基于牵制一致性理论,在每个子微网中选取一个电源作为牵制点,各个子微网的牵制点能够使得全局信息达到一致。与设置通信代理类似,一但牵制点发生故障,微网群则无法完成信息统一。并且,采用牵制节点策略的多微网无论在子微网中的投入多大的负荷,所有子微网都会随之响应,增加了功率调度成本。
综合以上微网群调度和控制问题,本文提出一种基于无功电流自适应下垂系数控制的多微网调度与控制协调运行方法。在实现多微网有功功率和无功功率精准分配的同时,当某个子微网系统容量不足时,启用最优功率调度算法,实现子微网间的功率互济。
1 子微网分布式控制结构
1.1 微网通信
使用通信拓扑图能够有效的实现微网中各控制变量信息的交换,以实现预期的控制目标[19]。微电网的通信图利用一组边将一组点相连接,边代表点之间的信息交换,其可以是双向的,即无向图,也可以是单相的,即有向图。微网中的双向通信可以表示为ℊ=(V,E,A)。其中,V={1,2,…,N}为通信图中点的集合,E={(i,j)∈V×V}为边的集合,A=(aij)N×N则表示邻接矩阵,aij为邻接矩阵的元素。当微网中,节点i和节点j之间有通信时,aij>0,若无通信,则aij=0。
1.2 下垂控制
在下垂控制[20-21]中,系统输出的有功和无功可根据戴维南定理分析,其表达式如下:
式中:P和Q分别为DG 发出的有功和无功;Vpcc为耦合点电压;E为DG 的输出电压幅值;θ为E和Vpcc之间的功角;R和X分别为线路电阻和电抗。
当θ足够小,并且考虑线路为感性时可得:
由式(3)和式(4)可得传统下垂控制方程:

式中:f*和V*分别为参考频率和电压;Pm,i和Qm,i分别为第m个子微网中DG 输出有功功率和无功功率;mm,i和nm,i分别为第m个子微网的有功和无功下垂系数。
1.3 一致性电压补偿策略
在电力系统中,电力系统调度中心一般向各单元输出的电压与额定电压不一致。基于此,为了弥补下垂控制中的电压降,本文设计了一种电压控制器,此控制器能够提供一个电压矫正项Δvi。基于动态一致性理论,电压估计装置如下:

式中:和Vm,i分别为子微网m中第i个DG 的估算器估算电压和本地电压幅值;η为控制器增益。
所以任何DG 的电压发生变化都会导致观测器i立即做出响应。电压观测器会根据邻居单元j的信息进行实时更新,并将观测器的值输送到PI 控制器中,以获得校正项Δvm,i:

式中:KP,v和KI,v分别为PI 控制器的比例项和积分项。
则式(6)可更新为:

在现有文献方法下,母线电压总是运行在额定值上,而在本文所提出的方法中,为了功率能够更精准的分配,各个DG 的本地电压幅值保持在可接受范围内即可,不相等的电压设定值提供了准确分配无功功率的机会,同时考虑了配电线路阻抗。
1.4 基于自适应下垂系数控制的无功功率分配策略
受到线路阻抗不匹配的影响,微网的无功功率并不能按照下垂系数精准的分配。本文用无功电流—电压下垂控制代替无功功率—电压作为下垂控制项,减少了功率计算环节,降低系统复杂度。当无功电流按照所定比例进行分配时,无功功率自然也按照预定比例分配。
根据式(1)和式(2),可以获得有功电流Iact、无功电流Ireact:

同样,当θ足够小,且考虑线路为感性时,有:

则式(5)和式(6)可以改写为:

式中:ka,m,i和kr,m,i分别为有功电流参与下的有功下垂系数和无功下垂系数;Iact,m,i和Ireact,m,i分别为子微网m中第i个分布式电源的有功电流和无功电流。
在式(6)中,若无功功率能够按比例分配,则有:

当下垂控制式更新为式(15)时,则式(16)变为:

令kr,m,iIreact,m,i=ρm,i,表示第m个子微网中节点i处的归一化的无功电流,将其与相邻节点j进行做差,得到负载失配项Δρm,i:

式中:c为无功电流控制器的增益。
将得到Δρm,i经过PI 控制器调节,得出下垂系数矫正项Δkr,m,i:

式中:KP,ρ和KI,ρ分别为PI 控制器的比例项和积分项。
综合式(9)、式(15)和式(19),可得到系统最终的下垂控制式:

1.5 一致性频率恢复策略
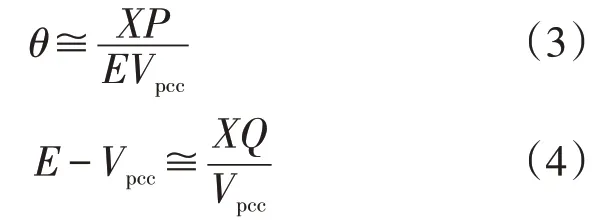
在传统的频率恢复策略下,需要利用到测量反馈机制,此种方法容易产生误差。本文提出了一种简单的频率恢复方法:
式中:φm,i=ka,m,iIact,m,i为第m个子微网中节点i的归一化有功电流;φˉm,i(t)为第m个子微网中节点i处的估算器估算的归一化有功电流的平均值;ε为频率估算器的控制增益。
系统总体控制图如图1 所示。

图1 系统控制框图Fig.1 System control block diagram
2 多微网最优功率调度策略
多微网的运行不仅需要考虑子微网的控制,子微网间的功率互济策略也同样重要。在本文中,采用最优潮流算法[22]对子微网进行功率调度,以子微网间的功率调度最小为目标,建立数学模型如下:

式中:Ploss,i和Pall,loss分别为第i个节点的网损和总的网损;Pij和Qij分别为线路ij上的有功功率和无功功率;Vi为第i个节点的电压幅值;Zij为线路上的阻抗。
将一定区域内的多个微电网相互连接,形成一个多微网系统。在最优潮流的调度策略下,可将多微网中的每个子微网看成是一个节点。在多微网系统运行时,各子微网首先采用上文中所提出的控制策略独自运行,当有负荷被投入到子微网且未超过子微网的最大发电容量时,子微网继续按照之前的策略运行,当子微网因为有大负荷的投入导致子微网容量不足时,最优功率调度策略被触发。容量不足的子微网可抽象成一个负荷节点,并将超出其容量之外的负荷看成是该节点的负荷值,未达到最大容量的子微网抽象为发电节点。确定好负荷和发电节点后,利用最优潮流调度程序对其进行计算,对容量不足的子微网进行功率调度。本文以IEEE4 节点系统为例,验证所提出的策略的可行性。4 节点系统拓扑结构如图2 所示。系统运行的流程图如图3 所示。

图2 IEEE4节点拓扑图Fig.2 IEEE4 node topology

图3 多微网运行流程图Fig.3 Multi-microgrid operation flow chart
3 仿真分析
现实情况下,1 d 的用电具有峰值和低谷,图4模拟出1 d 用电情况。

图4 各子微网24小时有功负荷和无功负荷变化情况Fig.4 24-hour active load and reactive load changes of each sub-microgrid
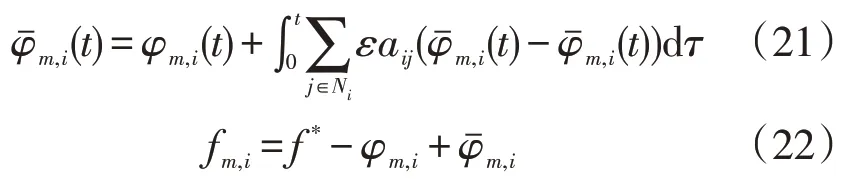
为不失一般性,选取1 d 用电最多的时间点20:00进行研究。结合图4 可得出每个MG 在20:00 的负荷信息如表1。
表1 20:00时各MG的负荷Table 1 Load of MGm at 20:00
根据表1 可得到各节点的状态信息如表2。

表2 20:00时各节点的状态信息Table 2 Status information of each node at 20:00
3.1 性能分析
将所提出的基于无功电流自适应下垂系数控制的多微网功率调度策略与传统下垂控制相比较,图5 所示为子微网拓扑结构,表3 为各节点潮流运算的结果。

图5 微网研究案例Fig.5 Microgrid study case

表3 最优潮流运算结果Table 3 Optimal power flow calculation results
图6 所示为传统下垂控制和添加本文所提控制策略的运行结果对比。为了节省篇幅,只展示负荷节点MG1 和一个发电节点MG4 的运行结果,其中MG4 运行结果如图8 所示。

图6 MG1采用传统下垂控制与所提出控制策略对比Fig.6 Comparison of MG1 with traditional droop control and the proposed control strategy
当t=1.5 s 时有负荷被投入到传统下垂控制微网和MG1 中。传统下垂控制随着微网的负荷增大,偏差也会变得更大。而对于本文所提出的策略,无论有无负荷的投入,如图6(b)和图7(b)所示,系统的频率和平均电压均保持在额定值,保证了电能质量。此外,如图6(e)和图6(g)所示,传统下垂控制的有功和无功的输出波动较大,且无功的分配精度较差。而在本文所提出的无功功率分配策略中,无功下垂系数会根据各DG 的负载失配情况,进行自适应修正(如图7(a)所示),从而实现无功功率能够按比例精准输出(见图6(h))。在本文所提出的控制策略下,由于t=1.5 s 时并没有子微网的容量不足,所以不需要进行功功率互济。

图7 MG1在所提策略控制下的自适应无功下垂系数和电压估计器输出Fig.7 Adaptive reactive droop coefficient and voltage estimator output of MG1 under the proposed control strategy
当t=2.5 s 时再投入负荷,导致微网出现超负荷现象,仅采用传统下垂控制,微网的输出功率无法满足负荷需求(如图6(e)、6(g)所示),导致微网的频率和电压出现较大幅度的跌落(见图6(a)和图6(c))。相比于本文所研究的控制策略,如图6(f)和图6(h)所示,当系统被投入大负荷且检测到MG1容量不足时,子微网间的最优潮流调度程序被触发。各子微网将各自的运行状态发送到潮流调度中心,调度中心将容量不足的子微网中超出的负荷值作为该节点的负载。此时,容量不足的子微网(MG1 和MG2)按照最大发电容量进行运行,将还有剩余系统容量的子微网(MG3 和MG4)作为发电节点。确定好负载和发电节点后,利用最优潮流算法以调度网损最小为目标进行计算,计算出每个发电节点应该承担的发电量,并将结果发送给下层子微网。下层子微网的发电节点根据计算结果,对容量不足的子微网进行功率援助。
如图8(c)和图8(d)所示,当t=2.5 s,MG4 收到调度层的信息后,立即进行了响应,根据潮流计算的结果输出有功功率和无功功率。可从图7(a)、图7(f)、图8(a)和图8(f)所示MG1、MG4 的频率和电压中看出,在使用了调度策略后,系统的频率和电压均维持在了额定值。如图8(d)所示的MG4 无功功率输出也因为如图8(e)所示的下垂系数能够自适应变化而精准的按照预定比例输出。通过以上实验证明,该策略不仅能对微网频率、电压、有功功率输出和无功功率输出进行优化,而且能够有效的解决单个微电网容量不足带来的影响。
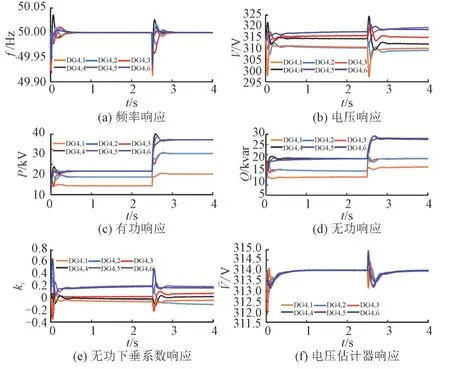
图8 MG4采用所提策略运行结果Fig.8 Operation results of MG4 with the proposed strategy
3.2 本文所提策略与牵制控制运行对比
本节将本文所提出的微网群运行策略与类似文献[8-10]所提出的牵制控制策略相比较,为节省篇幅同样只选取MG1 和MG4 中部分结果进行展示,如图9 和图10 所示。
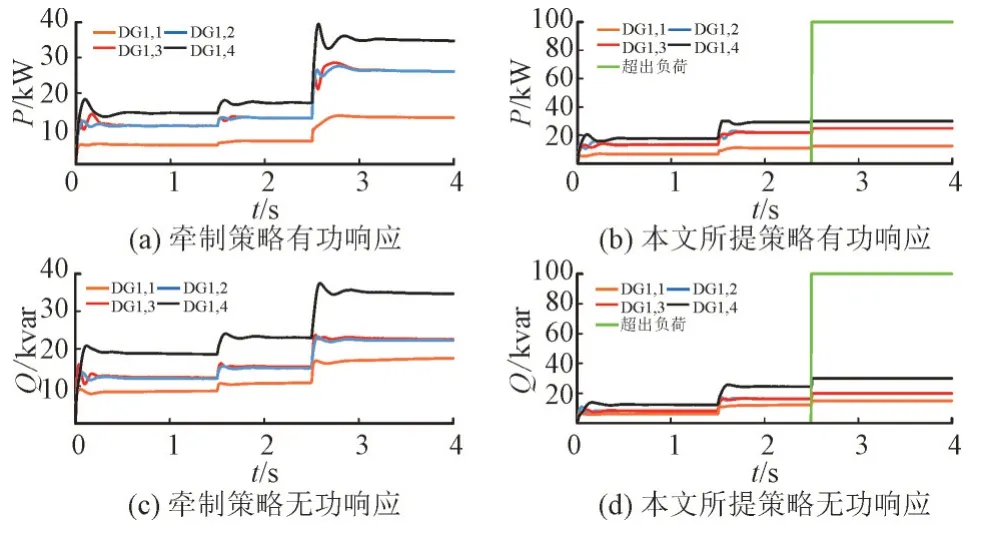
图9 微网群牵制控制策略与本文所提策略的MG1运行结果对比Fig.9 Comparison of MG1 operation results with microgrid clusters containment control strategy and the proposed strategy

图10 微网群牵制控制策略与本文所提策略的MG4运行结果对比Fig.10 Comparison of MG4 operation results with microgrid clusters containment control strategy and the proposed strategy
当t=1.5 s 时,在两种控制策略中都投入相同负荷到MG1 中;当t=2.5 s 时,再将大负荷投入到MG1中。可以从图9 和图10 中看出,采用微网群牵制控制策略,则无论系统投入多大的负荷,多微网中所有的DG 都会随之响应,这就导致时刻都需要进行微网间的功率交换,增加了微网群的运行成本。对比本文所提出的多微网运行策略,当t=1.5 s 时,MG1 完全能够自主地为负荷供电,不需要与其它子微网进行功率互济;只有当t=2.5 s 时,MG1 的发电量不足时,子微网间才进行功率调度,该方法降低了子微网间需要时刻通信带来的故障风险。此外,当有大负荷加入时,采用牵制控制策略的多微网在有负荷投入时由于响应的DG 过多,受到有功和无功之间的耦合和通信影响,使得功率均分效果有所降低。
4 结论
针对微网中的无功功率分配问题提出了无功电流自适应下垂系数控制策略,提升了系统的无功功率分配精度。且没有采用传统下垂控制中P-f、Q-V控制,所以省去了功率计算环节,降低了系统的复杂度。此外,也对频率和电压设计了恢复机制,提升了电能质量。
提出多微网控制与功率调度相结合的管控一体化策略,在该方法中,各子微网采用所提出的控制策略独立运行,只有当多微网系统中子微网超负荷时,调度策略才会被启动。相比于现有文献中提出的微网群基于牵制点的一致性控制策略,本文策略不仅解决了单个微电网运行过程中的可能存在的容量不足的问题,提高了系统稳定性,而且子微网间不需要时刻保持通信,减少了多微网运行成本。此外,所提策略在负荷投入时响应的DG 较少,所以功率均分相较于采用牵制控制策略的多微网有着更好效果。
