气象探空观测的技术发展与未来展望
2022-11-30曹晓钟夏元彩罗皓文刘立辉刘银锋刘振宇李欣郭然郭启云
曹晓钟 夏元彩 罗皓文 刘立辉, 刘银锋 刘振宇 李欣 郭然 郭启云
(1 中国气象局气象探测中心,北京 100081;2 邢台市气象局,邢台 054000)
0 引言
综合气象观测是基础理论与现代科学技术相结合,多学科交叉融合的独立学科,处于大气科学发展的前沿[1],其数据是开展天气预警预报、气候预测预估及气象服务、科学研究的基础,是推动气象科学发展的动力。常规高空气象观测(简称“气象探空观测”)是指采用气球携带无线电探空仪以自由升空方式(或利用飞机、飞艇和火箭等各种新型技术载体平台的方式)对大气中各个高度的气压、温度、湿度、风等气象要素进行直接接触式探测。气象探空观测作为综合气象观测的重要组成部分,可获取地面至30 km高空的温度、湿度、气压、风速、风向等气象要素[2],在数值预报、天气分析、短时临近潜势预报、遥感设备比对等领域发挥重要的作用[3]。世界气象组织(WMO)和全球气候观测系统(GCOS)对气象探空观测的准确度提出了更高要求,因此,各国不断进行新技术攻克与方法研究,以提高气象探空观测的准确度及其资料质量[4]。
1 气象探空观测发展历程
1.1 气象探空观测历史发展
1749年,英国气象学家将温度计捆绑在风筝上进行最低层大气温度的测量,这是气象探空观测最早开始的标志。1783年,法国科学家研制出携带温度、气压自记装置的氢气球,用以测定高空温度和气压。1809年,英国科学家首创用测风气球探测高空风。1928年,苏联科学家发明了无线电探空仪,极大推动了气象探空观测事业的发展。20世纪30年代,维萨拉发明了芬式无线电探空仪,探测高度达30~40 km,迅速在全世界推广使用[5]。另外,飞机、火箭载体技术的成熟和应用,特别是火箭探测的应用使探空高度达到60 km以上[6]。
我国20世纪50年代以来,开始建设并形成气象探空观测网。初期探空仪全部依赖进口,为改变这种局面,我国开始仿制生产原苏联49型探空仪,并于20世纪60年代完成了国产59型机械式探空仪生产定型,实现了探空仪国产化。59型机械式探空仪-701二次测风雷达探空系统(简称59-701探空系统)作为主力探测设备在我国的气象探空观测中发挥了重要的作用,一直延续使用到2009年[7]。20世纪末,中国气象局启动了新型气象探空雷达的研制;2001年,L波段二次测风雷达-GTS1型电子探空仪系统(简称L波段雷达探空系统)研制成功并定型列装,随后中国气象局逐步开始探空站的L波段探空系统升级,至2010年,完成了全国120个探空站设备的更新换代[8]。
1.2 气象探空观测技术发展
随着技术的发展,气象探空观测先后经历了无线电经纬仪、雷达、导航等不同技术体制的发展。无线电经纬仪用无线电定向技术跟踪并接收无线电探空仪信号,测量探空仪升空期间随时间变化的方位、仰角,并配合测高方法测量高空风向风速。雷达测风精度明显高于无线电经纬仪,但雷达需要大功率发射机,因而地面设备的投资较大。我国目前业务在用的L波段雷达探空系统在雷达低仰角情况下,测风误差显著增大,不满足气候观测需求[9]。卫星导航定位探空系统因其定位准确、测风准确度高等优越性凸显,特别是地面设备简单,采用计算机进行数据处理,自动化程度高,可以大幅度地减少地面设备的运行和维护经费,逐渐成为探空主流[10]。2010年WMO高性能探空仪国际比对试验以后,GPS导航测风探空仪得到了迅速推广,美国和欧洲的雷达、无线电经纬仪及罗兰-C等探空系统逐步被GPS导航测风探空系统替代。我国近年也成功研制了北斗/GPS联合导航定位系统,并通过技术鉴定[11]。目前,正在进行台站业务试运行,试验成功后可替代L波段雷达探空系统,以提高我国的探空观测水平[12]。
1.3 气象探空观测站网布局
目前,WMO将全球探空站主要分为3类:全球资料交换探空站(818个)、GCOS探空站(177个)与国内探空站。全球高空探测的站网布局见图1。为弥补探空站网长期稳定的空间不足,欧洲加强了商用飞机观测系(AMDAR)的应用开发,美国发展卫星掩星系统实现高质量大气垂直廓线观测系统建设[13]。
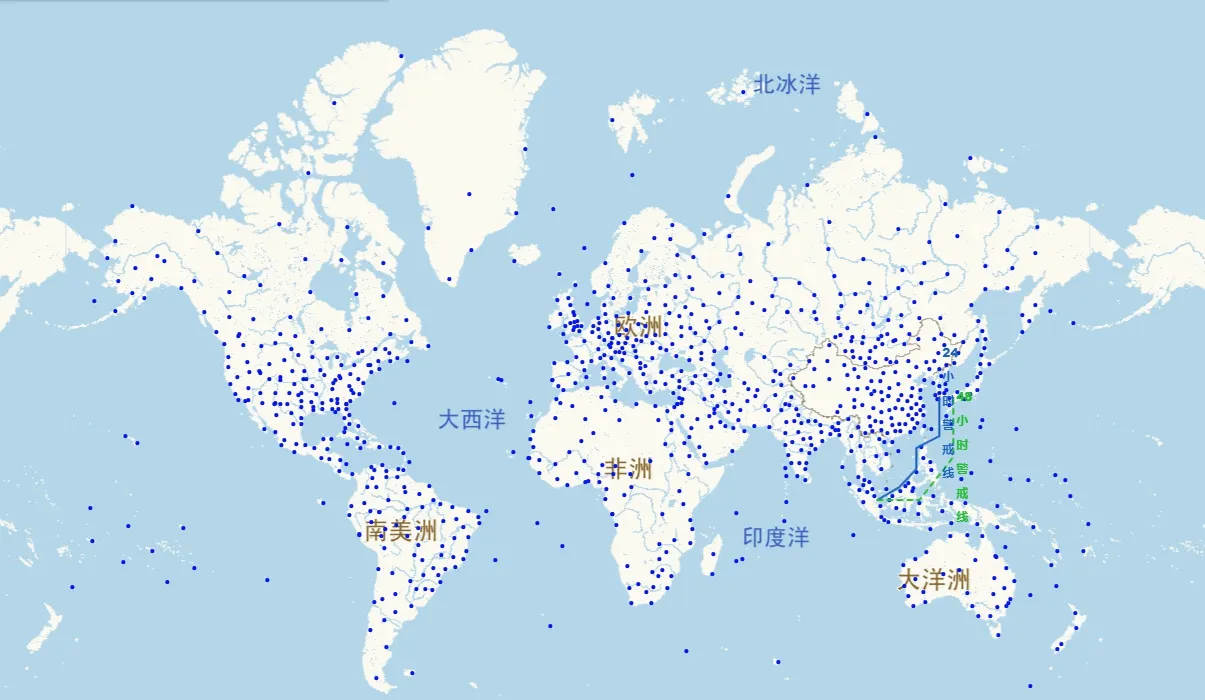
图1 全球探空站网布局Fig.1 The layout of global sounding station network
我国现有气象探空站120个(不含港台),站网布局如图2所示,承担全球资料交换任务的有89个站,含7个GUAN(全球气候观测网)站和1个GRUAN(全球基准气候观测网)站。还有3套自动探空系统自2014年开始一直在西藏那曲、申扎和改则进行青藏高原科考试验服务。我国整体站网呈现“东密西疏”的布局,整体站网间距在300 km左右,存在观测空白区。在探空资料拓展方面,AMDAR、掩星的建设和研究均处于起步阶段。我国与美国、德国的常规气象探空观测业务布局现状对比如表1所示。
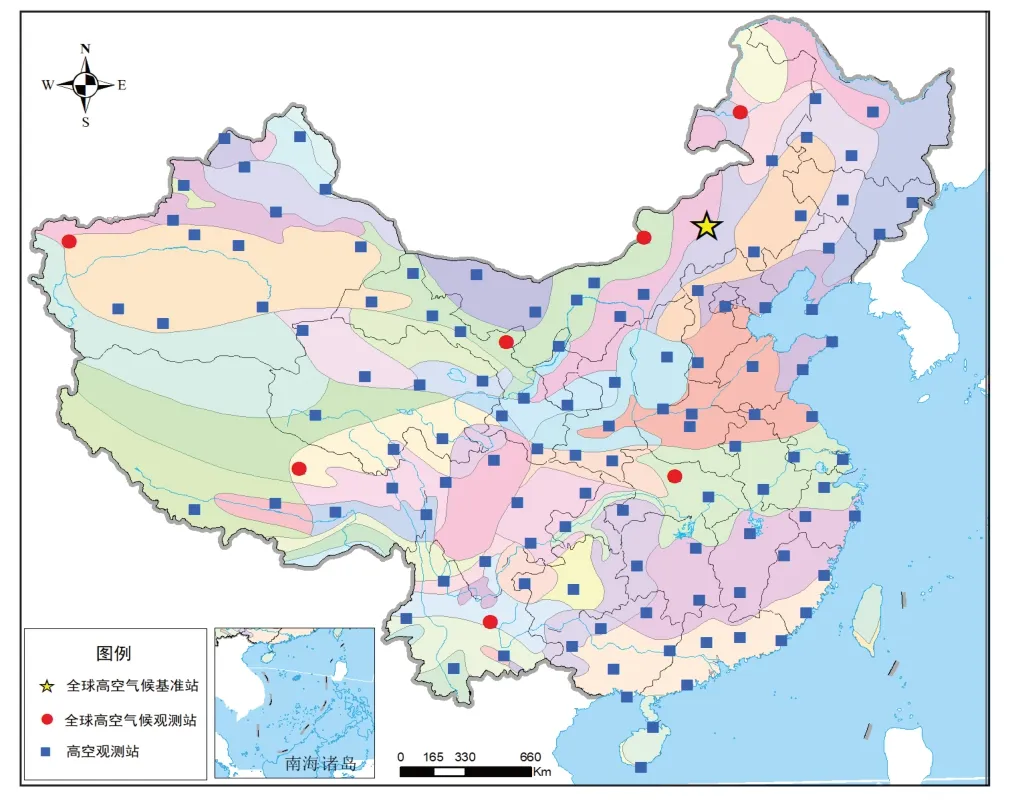
图2 中国探空业务站网布局Fig.2 The layout of China’s operational sounding station network
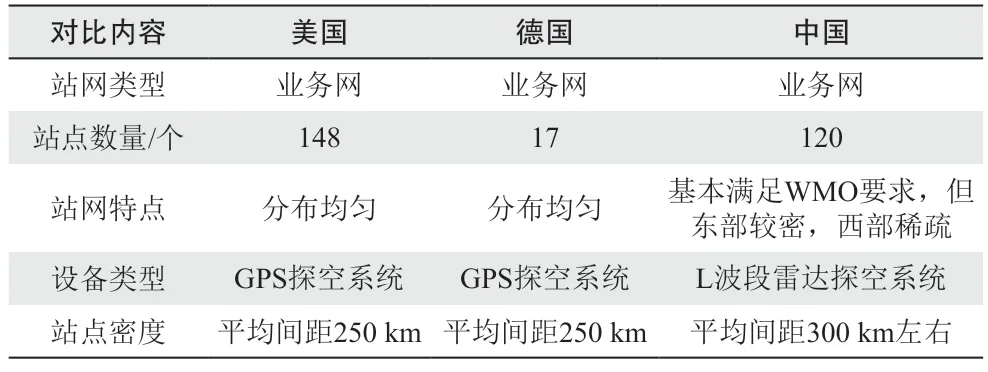
表1 常规探空观测业务布局现状对比Table 1 The comparison of the current situation of conventional operational sounding layout
2 气象探空观测设备
2.1 载体平台
2.1.1 气球
气球按照是否密闭及内部压力的不同,可以分为零压气球和超压气球两大类。零压气球是最常见的自由气球,从20世纪初一直使用至今,采用“自然形”的外形设计,外皮选用耐低温聚乙烯薄膜。超压气球是一种新型的气球,与零压气球的开放式结构不同,采用耐高压的薄膜材料以及新型结构设计,球体封闭。超压气球是科学气球研究的热点,按照囊体的个数可以分为一元和二元两大类,一元超压气球的目标是中低纬度长航时飞行(ULDB),二元超压气球的目标是长航时区域驻留及组网区域覆盖(project loon)。从平飞高度的外观形态上,可以轻易区分零压气球和超压气球,如图3所示,零压气球呈水滴自然型,而超压气球外形则与南瓜类似。另外,零压气球下部明显有数条排气管道与大气相通,而超压气球是密闭的[14]。
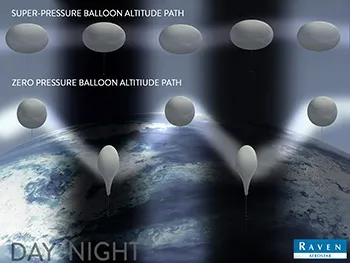
图3 超压气球和零压气球的飞行高度对比Fig.3 The comparison of flight height between overpressure balloons and zero pressure balloons
现有的气象探空观测采用气球单程升空方式,升空至28 km左右高度,气球爆炸,探空截止。所采用的气球是零压气球,采用乳胶制成。按照球的重量区分型号,有测风和探空气球两种,测风气球通常为20 g或30 g,探空气球根据不同探测高度的需要,可采用300 g、750 g、1600 g、2000 g等,气球质量越大,施放的高度越高[15]。
2.1.2 飞机
有人驾驶飞机一直是下投探空的主要平台,如美国国家海洋和大气管理局(NOAA)的飞机运行中心,主要任务之一就是为热带飓风研究进行飞机下投探空探测。美国空军的“飓风猎人”飞行中队,使用多架WC-130大力神飞机进行气象侦察活动,主要任务就是对大西洋和西太平洋上生成的热带气旋和台风进行下投探空探测[16]。
21世纪以来,无人驾驶飞机成为台风探测的新平台,如全球鹰(Global Hawk)是美国军方使用的一种无人驾驶飞机,其飞行速度750 km/h,续航时间为30 h,飞行高度达20 km,无论从飞行高度还是续航时间都远远高于用于台风探测的有人飞机。2020年8月,中国气象局联合多家单位利用高空大型无人机翼龙-10,首次对台风森拉克外围云系开展了精细探测。翼龙-10无人机机身长度9 m,翼展17.8 m,巡航速度550 km/h,续航时间6 h。翼龙-10无人机携带了吊舱式下投探空系统和毫米波测云雷达,其中吊舱式下投探空系统可以机动、高效地对指定地区的大气环境进行高分辨率探测监测,以获取航行探测范围内垂直高度的温度、气压、湿度、风向、风速等大气参数的垂直廓线,为研究气候变化、气象科学及极端天气(如台风、龙卷风等)提供实时、准确、高空间分辨率的气象信息作为支撑[17]。
2.1.3 降落伞
降落伞主要作为下投探空仪的载体,携带其在下降过程中进行探测,同时也可作为测风的示踪物,通过测量下降过程中伞物系统的运动速度或轨迹进行风场测量。与气球匀速运动不同,降落伞在垂直方向上存在加速度,一般下降速度随高度降低而变小。因此,降落伞在水平方向的运动不能认为仅是风造成的,特别是在下降初始阶段。用于下投探空的降落伞应能尽快消除初始阶段自由落体形成的加速度和从载体中抛出时的初始速度,使其尽快达到平衡。常见的降落伞有圆形、锥形、十字形(如图4)[18]。机载下投多采用冲压式立方锥形降落伞,通过充气,可保持降落伞的外形基本稳定,其阻力系数也基本保持不变,探空仪的摆动幅度较小,而圆形伞和十字伞则有较大的摆角。

图4 常见降落伞示意图Fig.4 The schematic diagram of commonly-used parachutes
2.1.4 飞艇
20世纪80年代美国开始研制飞艇,日本、英国、德国等国家也开展了大量的飞艇技术攻关。自“十五”计划以来,我国多家单位启动了飞艇的研究工作。其中,北京航空航天大学研制的飞艇可以在19~20 km高度驻空飞30天以上,巡航空速设计为25 m/s,目前已完成3天的飞艇关键技术试飞试验和探空仪投放试验。飞艇利用空气浮力携带大载重的载荷,可长时间驻留在空中,其工作流程如图5所示。中国工程院分别对卫星、平流层飞艇和飞机按照部署灵活性、续航时间、飞行高度、效费比等九个方面进行比较,根据图6可以看出,平流层飞艇具有持久留空、广域感知、动态跟踪、精准干预的主要特点,与无人机、卫星相比,平流层飞艇在载荷应用、区域驻留、效费比等方面有无法替换的优势。同时,飞艇驻空观测可以有效弥补地面观测与航天观测中飞行高度、部署灵活性等方面的问题 。未来可实现类似于GEO卫星的固定区域长时“凝视”,可以用来探测台风等自然灾害天气的形成、生长、消亡过程,也可以部署在气象观测站少、自然条件恶劣的地区[19]。
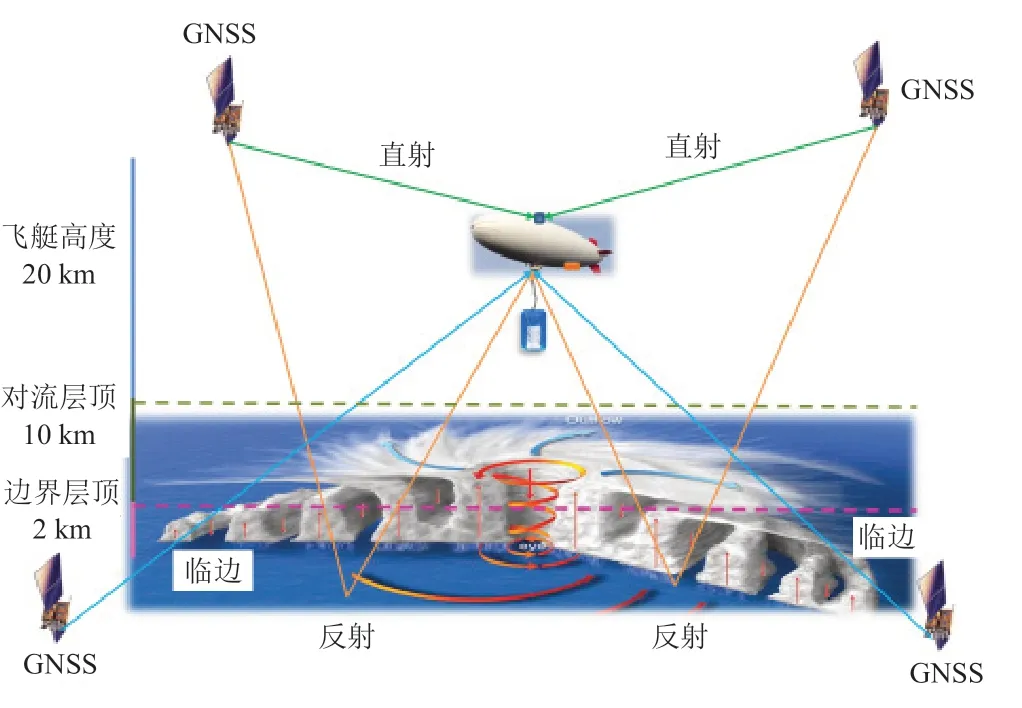
图5 平流层飞艇工作原理图Fig.5 Schematic diagram for stratospheric airships
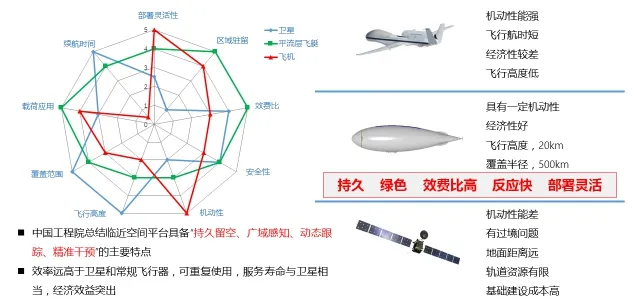
图6 平流层飞艇与无人机、卫星的对比Fig.6 Stratospheric airships versus drones and satellites
2.1.5 火箭
火箭携带探空仪快速升空,在弹道顶点附近与探空仪分离,分离后的探空仪在降落伞的控制下平稳下降,下降过程中探空仪实时测量大气温度、湿度、气压、风等气象信息,其具有探测快速,探测位置和方向可控的优点(图7)。
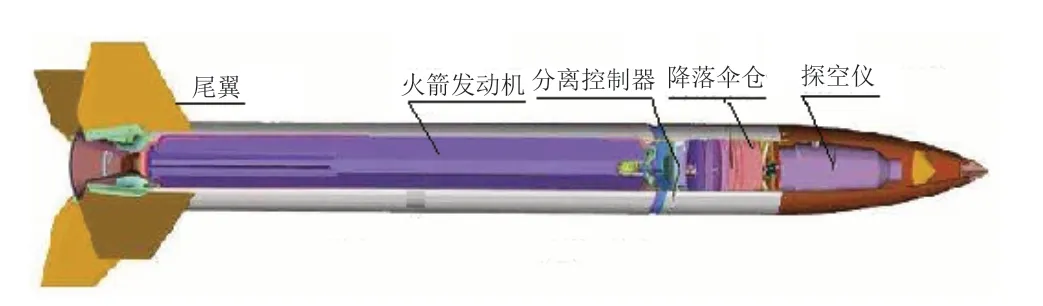
图7 探空火箭组成及内部结构Fig.7 Composition and internal structure of rocket sounding
目前,火箭在气象上主要应用于海洋低空探测、人工影响天气作业、邻近空间探测等方面(图8)。其中,海洋低空探测火箭高度一般为1.5 km,主要测量温度、湿度、气压等气象要素,获取大气波导信息;人工影响天气领域中火箭探测高度一般为8 km,主要测量温度、湿度、气压、风速、风向,用于人工影响天气作业区域降雨条件及作业后效果的评估;邻近空间探测火箭射高一般为70 km左右,测量20~60 km高度的温度、风,并计算出气压和空气密度[20]。

图8 探空火箭探测工作示意图Fig.8 Schematic diagram of sounding rocket detection
2.2 探空仪
2.2.1 常规探空仪
探空仪由传感器、采集处理电路、通讯系统等组成,其中传感器是探空仪最主要的部件,直接决定着探空测量的精度。传感器又可分为机械式传感器和电子传感器。与电子传感器相比,机械式传感器探测精度较低,滞后系数较大。WMO通过8次探空仪国际比对试验,逐步推动探空仪传感器由机械向电子转变[21]。
GPS探空系统试验工作的开展推动我国传感器技术进入飞速发展阶段,研制出的珠状温度传感器减小了传感器体积和反应时间常数,湿敏电容湿度传感器提高了反应速度,硅压阻气压传感器提高了气压探测准确性,探空仪传感器的对比如表2。在WMO阳江第8届国际高精度探空仪比对试验中,CIMO组成了比对数据处理评估专家组,对各参试探空仪获取观测数据利用RSKOMP标准分析软件进行了分析处理,我国L波段GTS1-2型电子探空仪及两个国产GPS探空仪参加了比对。阳江国际比对试验结束后,根据各参试探空仪得分情况,WMO最终评估报告结果如表3所示,我国参加比对的三个厂家温度测量结果较好,其中一家GPS温度测量精度可满足GCOS水平的要求;另外一厂GPS的气压、位势高度可满足常规业务需求,测风可满足GCOS要求,总体效果优于日本和韩国[22,23]。
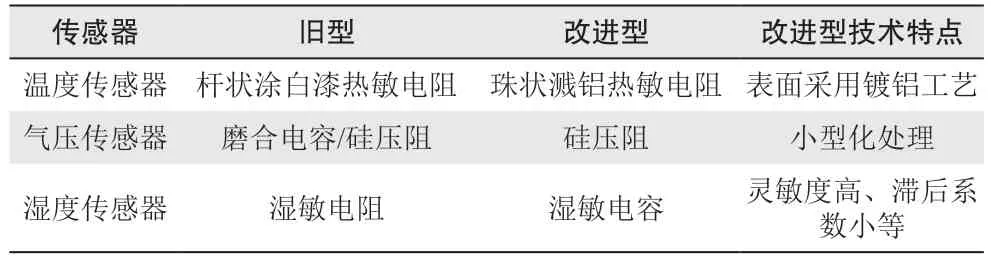
表2 探空仪传感器的对比Table 2 The comparison of radiosonde sensors

表3 WMO最终评估报告结果Table 3 WMO final evaluation report results
根据WMO第8次国际探空仪比对报告建议,我国业务在用的探空仪已经不能满足业务需求。因此,中国气象局自2010年针对业务探空仪进行了全面技术改进和试验定型[24],并于2020年1月正式投入业务应用。GRAPES背景场评估表明,2020年1—3月全国探空站质量有所提升,其中位势高度(气压、温度和湿度的综合体现)平均偏差绝对值由11.2 gpm降为5.8 gpm,GTS11、GTS12、GTS13探空仪温度标准差分别减小了0.2 ℃、0.06 ℃、0.04 ℃,说明改进型探空仪相对原来的探空仪,探测误差明显降低,整体探空观测质量得到提升[25]。
2.2.2 特种探空仪
在常规探空仪的基础上,根据不同的目的(如测定臭氧、大气电场等)派生出了各种特殊用途的探空仪。
臭氧探空仪是在常规测量温度、湿度、气压和风向风速探空仪的基础上增加了臭氧传感器。目前的臭氧传感器通常采用化学反应方法,利用臭氧与碘化钾反应生成自由碘的原理进行探测,这种传感器的误差接近±5%,探测高度可达15 hPa等压面以上。当前国产臭氧探空仪已通过与美国iMet GPS探空仪附加ECC臭氧传感器的臭氧探空仪比对试验,证明国产探空仪的测量性能良好,已在北京、南京、重庆、清远、杭州等探空站投入到臭氧探空试验中应用[26]。
大气电场探空仪则是在常规探空仪的基础上增加了电场传感器。电场传感器通常采用旋转片式,测量范围为±3kV,与大气的实际电场强度相匹配。目前,中国科学院正在研制由半导体硅片制作的电场传感器,体积很小,可作为一个测量元件直接安装在常规探空仪上,这种传感器目前已通过了技术鉴定[27]。
2.3 地面设备
2.3.1 制氢设施
为满足高空气象探测的用氢需求,我国研制了QDQ2-1A型自动水电解制氢设备(图9),通过远程控制可自动、安全、高效、快捷地制取高纯度氢气。QDQ2-1A自动电解水制氢设备主要由制氢机、控制装置、储氢罐三部分组成,包括自动制水、远程视频监控、氢气泄露报警、开机制氢参数自动记录存储、上位机远程操控制氢设备等功能。该设备实现了一键开机后的全部操作自动化,能有效减轻台站工作人员的劳动强度,保障基层高空台站涉氢业务安全、可靠、稳定运行。目前,QDQ2-1A自动电解水制氢设备已经获得中国气象局装备,并逐步投入业务使用[28]。

图9 QDQ2-1A型自动水电解制氢设备Fig.9 The Qdq2-1a automatic water electrolysis hydrogen production equipment
2.3.2 基测设备
电子探空仪基测箱是探空业务主要配套保障设备,用于L波段雷达探空系统、卫星导航探空系统电子探空仪基值测定的标准设备,是为探空仪施放前进行温度、湿度、气压基点准确度比对提供综合测试的仪器,可为基点比对提供温度、相对湿度、气压标准器和稳定的温度、湿度比对环境。基测箱主要由标准器单元、湿度环境产生单元、测量显示单元、检测室(包含通风器)、数据传输单元、探空仪供电电源和机箱等组成。目前我国业务在用的主要有JKZ1-1型、JKZ3-1型、TD2A型基测箱[29](图10)。
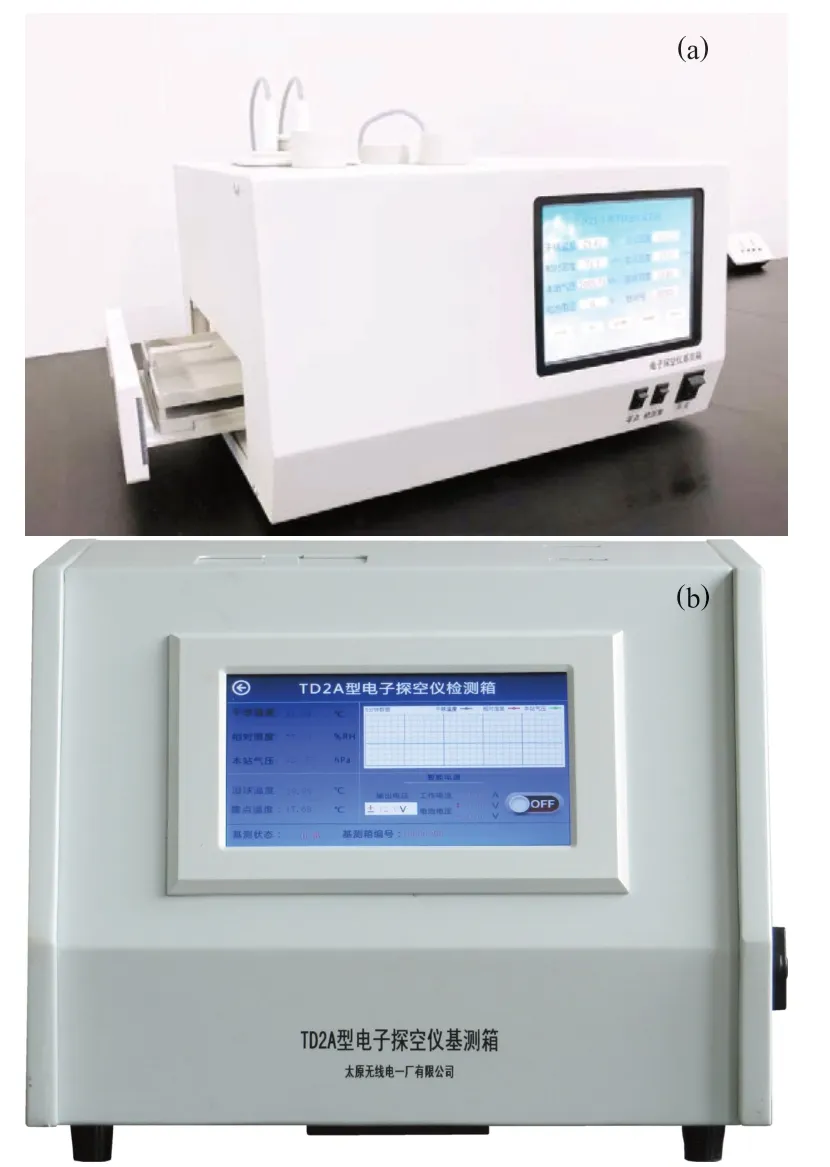
图10 JKZ1-1型基测箱(a)、TD2A型基测箱(b)Fig.10 Test box of sounding of JKZ1-1(a)、Test box of sounding of TD2A (b)
2.3.3 接收系统
2.3.3.1 L波段二次测风雷达
L波段二次测风雷达是我国业务在用的高空探测系统地面接收设备(图11),主要用于放大、解调探空仪发回的应答信号和探空信号。雷达将接收到的应答信号从高频变成视频,送给测距系统,以完成距离测定,同时送给显示分系统,供雷达操作员观测。此外,还将探空信号从高频变换成视频,再解调出数字探空码送给数据终端系统,完成探空码的录取、转换、数据处理、存储及打印输出;同时将天线波瓣扫描所形成的测角误差信号解调出来,提供给天控分系统,完成雷达天线对探空仪的跟踪[30]。

图11 L波段二次测风雷达Fig.11 L-band secondary wind radar
2.3.3.2 卫星导航探空接收机
卫星导航探空接收机是目前国际主流先进探空系统接收设备(图12)。目前,我国最新研制的多通道卫星导航探空接收机是新一代高空气象探测体系的重要组成部分,用于完成新型卫星导航探空仪的数据接收。该设备采用P波段(400.15~406 MHz)进行数据通信,具有8个通道,最大通信距离大于200 km,既可在普通探空模式下应用,又可以实现多探空仪的平漂和下降段数据接收,即多通道并行高空观测数据接收。通过组网可最大程度降低远距离、低仰角造成的信号遮挡数据丢失,提高频率使用效率,满足探空仪信号跨区接收识别,可以最大化提升探空网络的数据承载能力[31]。该设备于2018年开始在长江中下游开展了大量的动态试验,在海南永兴岛、三亚进行组网建设,设备运行稳定、圆满完成试验任务,其工作机制、系统稳定性、可靠性均得到了良好的验证。

图12 卫星导航探空接收机Fig.12 Satellite navigation radiosonde receiver
2.4 气象探空自动化设备
2.4.1 自动探空系统
目前,自动探空系统主要有芬兰VAISALA公司的ASAP型、法国MODEM公司的ARL-9000型、日本MEISEI公司的ARS型等三种型号,被广泛应用于欧美等发达国家,其中ASAP型的应用最为普遍。当前全球资料交换站中已经有超过60个自动探空站,并逐年递增,为此,WMO/CIMO也提出了应对自动探空系统业务化后带来的观测资料变化分析的技术任务[32]。
我国自主研制的自动探空系统已于2011年研制成功,到目前经历了两代技术发展,最新系统能够实现探空仪远程控制和无人控制条件下连续(最多60个)探空仪自动准备、气球自动充灌、探空仪自动施放和探空数据自动获取,可通过地面风向风速自动采集,可以控制放球筒顶盖的开启方向,突破了国外无法大风放球的技术瓶颈,完成了能够抵抗20 m/s天气下进行放球的技术设计,在八级大风条件下实施自动放球,是该领域世界领先产品[33]。
2.4.2 自动放球系统
自动放球系统是用于探空站自动实施放球的装置,是气象探空观测的辅助系统。我国的自动放球系统与自动探空系统同时研制成功,可与测风雷达或其它探空测风设备配合,自动实施完成气象探空的放球工作,其自动充气、探空仪自动施放的可用性能够满足业务使用要求,试验期间业务适用性、业务稳定性较好。目前,我国有40部自动放球系统已投入业务,与L波段二次测风雷达配套应用[34]。
3 气象探空观测数据处理
在探空观测资料处理及应用方面,欧美等发达国家朝着更加精细化方向发展,在观测数据质量控制、质量评估、交叉检验方面均有进展。当前我国气象探空数据的实时质量控制仍主要依托于人工,在精细化探空资料处理应用和检验方面存在较大差距[35](图13)。

图13 我国自动探空系统和自动放球系统Fig.13 The automatic sounding system and automatic ball release system of China
3.1 传感器测量修正
影响探空仪温度测量的误差源主要包括探空仪自身的误差和外界环境辐射、热交换引起的误差。热敏电阻温度传感器短波反射率大于93%,长波吸收率超过90%,在没有进行辐射误差订正的情况下,高空温度测量能造成大约3 K的偏差。2011年,中国气象局对气象探空温度测量辐射订正算法进行了改进,利用传感器的横截面积、质量、比热及太阳高度角和背景辐射等参数建立订正模型,提出了温度传感器订正方程,使温度辐射误差减小了1/3。利用研制的辐射订正模型对GTS11型探空仪进行温度辐射订正,2013年11月5日14时的订正个例如图14所示,订正后的温度辐射误差明显减小近一半[36]。
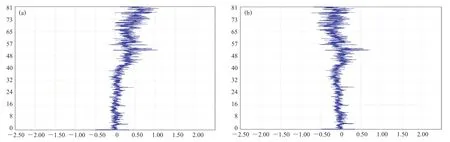
图14 辐射订正前的温度偏差(a)和辐射订正后的温度偏差(b)Fig.14 (a) The temperature bias before radiation correction;(b) the temperature bias after radiation correction
3.2 数据质量控制
欧美等发达国家常规探空通过设备段、台站段、站网段相结合的实时质量控制方法,建立了完善的分级质量控制体系,而我国台站级质量控制自动化程度不高,省级和国家级数据质量控制和质量评估体系尚不完善[37],如表4所示。在现有探空质量控制的基础上,经过细致分析我国往返式智能探空观测资料的特点,建立了往返式智能探空质量控制流程(图15)。该流程精减了现有质量控制流程,并将部分质量控制下沉至芯片端,推进了我国探空质量控制模式改进[38]。
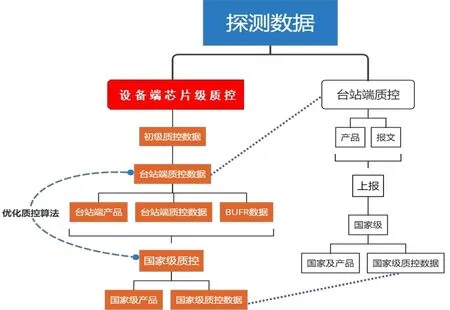
图15 往返式智能探空系统质量控制流程Fig.15 The quality control process of the return sounding system
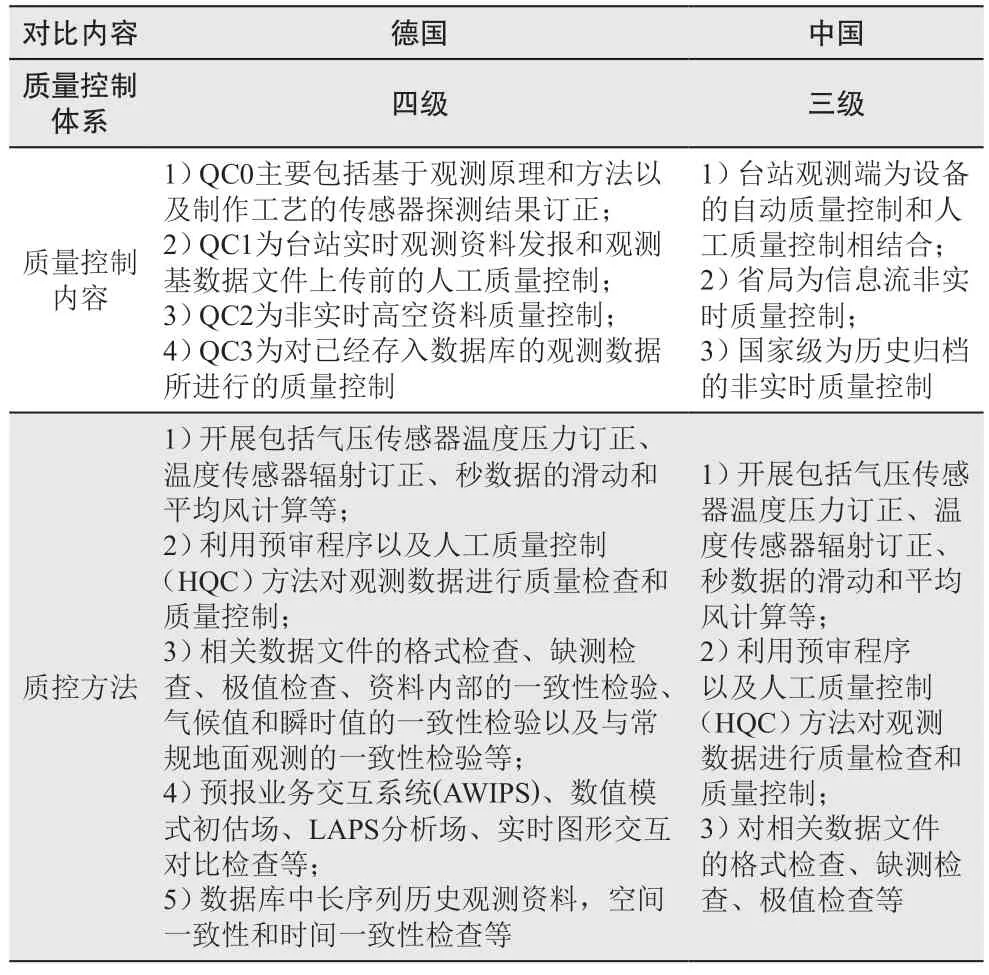
表4 探空观测数据质量控制现状对比Table 4 The comparison of quality control status of sounding observation data
3.3 数据产品生成
气象探空提供的高分辨率数据产品能够更加细致地描述大气温、湿、压、风的垂直分布,对天气系统的反映更清晰准确,通过探空分析大气的层结状况,对暴雨、强对流、大雾、台风等灾害性天气预报至关重要。探空产品可实现对大气环流结构和强度变化进行监测,为天气预报提供强有力支持[39]。目前,我国的气象探空观测产品主要包括单站产品、多站产品和全国产品[40]。单站产品主要包括:温度对数压力图、温湿曲线、水平风垂直剖面、对流层顶高度、零度层高度、抬升凝结高度、自由对流高度、平衡高度等。多站产品主要包括:温度曲线对比、湿度曲线对比、风垂直剖面对比、对流层顶高度对比、零度层对比、抬升凝结高度对比、自由对流高度对比、平衡高度对比等。全国产品主要包括:等压面产品、云产品、逆温层分布、对流层顶分布、温度平流、比湿、散度、零度层分布、A指数、K指数、山崎指数、沙氏指数、抬升指数、总指数、强天气威胁指数、垂直风切变指数等。
3.4 数据质量评估
欧、美、日等在探空资料精细化评估、应用以及与其他观测系统交叉检验校准方面取得了显著的进展。日本气象厅(JMA)以其全球预报模式(JMA Global Model)初猜场为基准,定期发布月报告和半年报告,报告中包括生成低质量观测数据的可疑台站综合清单;欧洲中期天气预报中心(ECMWF)以全球预报模式为基准,每月发布EC全球数据质量监测评估报告,对不同要素、不同高度层观测数据的“数据可用性”和“数据质量”等进行评估,形成可疑台站清单[41]。
在探空观测与其他观测交叉检验方面,中国台湾和美国于2006年合作推出的COSMIC掩星星座计划,共有6颗在轨卫星,每天可提供2500个有效的大气参数剖面及3000多个电离层剖面,这些全球分布的高精度掩星探测对于提高全球天气预报的精度、促进大气和气候研究及电离层的探测和研究等具有重要的应用价值。美国NOAA建设了NPROVS产品检验系统,通过卫星对西北太平洋进行观测,每日汇编探空仪、下投探空仪、数值天气预报(NWP)和卫星观测产品的数据集,用于卫星数据真实性检验,并进行探空质量的交叉检验[42]。
中国气象局以GRAPES预报产品为基准,完成全国及二区协探空设备的数据质量评估,定期发布月报告。在风云03A卫星地面应用工程中,我国于2020年起开展锡林浩特高空基准气候观测站的业务建设,建立以基准探空系统为基础的“0~35 km垂直大气柱基准观测能力”,为气候观测、卫星真实性检验和预报产品检验提供基础,并为未来高空气候观测网络建设提供应用示范[43]。
4 往返式智能探空系统
近年来,随着“云大物移智”技术的发展,我国独创完成往返式智能探空系统的研制。该系统如图16所示,以北斗卫星导航定位测风体制为基础,将传统的气象气球上升阶段观测拓展为“上升-平漂-下降”三阶段观测,拓展了平流层长航时直接观测能力,将气象探空的有效观测时间延至6个小时以上,通过08时和20时两次探空施放,同时实现了14时和02时的加密观测[44]。该系统采用地-空物联网技术,将传统的由单接收站接收单个探空仪数据并定时发报的应用模式,转变为多接收站可同时接收多个探空仪数据并实时进行数据处理上传的应用方式。通过高并发的时分、频分自适应广域地-空物联网,实现全网的智能化运行管理[45]。
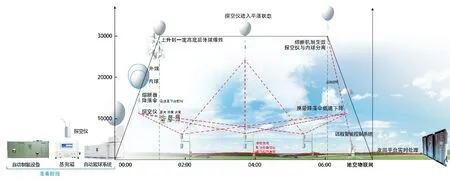
图16 往返式智能探空系统示意图Fig.16 The schematic diagram of the return sounding system
往返式智能探空系统至今已经开展了2000多次外场试验,通过对试验的数据分析表明,上升段的温度、湿度、风的测量达到了WMO CIMO8规定的理想目标要求。平漂段除了日间温度外,其他要素的测量均达到了WMO CIMO8规定的突破目标要求;下降段各要素的测量均达到了WMO CIMO8规定的突破目标要求[46]。下降探测实现了在原有单次放球探空基础上的时间加密,结合上升探测可以实现捕获天气细微变化,平漂探测弥补了平流层长时效连续直接探测的资料空白,具有很好的应用前景[47-49]。
5 未来展望
为与国际探空技术接轨,我国在做好L波段雷达探空系统业务建设的同时,开展了卫星导航探空技术的技术储备和研发试验。随着北斗卫星导航系统的技术逐渐成熟,建立以卫星导航定位测风系统为主要特征的下一代探空系统,是我国气象探空近期发展的主要目标。同时,开展系统智能化、物联网化的硬件装备升级,建立包括往返式智能平漂探空系统、自动探空系统、自动放球系统、自动化制氢系统、智能化基测箱等技术装备的升级,也是气象探空系统发展的主要方向。在传感器领域,需要不断提升国产化技术水平,实现我国自主湿度和气压传感器的业务应用,使探空整体装备技术水平达到国际先进。另外,随着需求和技术的发展,臭氧、大气成分、空间电场、太阳辐射等在内的新型探空传感器也将在气球探空中大量应用。面向探空资料应用需求,开展全球探空资料评估技术研究,特别是引入全球多元数值背景场产品、预报产品、再分析产品、AMDAR资料、掩星资料等,开展与探空廓线资料的时空匹配和比对,开展交叉检验,并在此基础上基于探空传感器的探测原理和特征分析,实现探空资料的精细化质量控制,进一步开展精细化探空资料产品开发,为后续应用提供基础支撑,为新型探空传感器的观测方法研究提供试验支撑平台。
