含智能网联汽车的混行车辆通过交叉口研究综述
2022-11-30陈宝杰张虹霞吴文静
陈宝杰,张虹霞,吴文静
(长安大学 汽车学院,陕西 西安 710064)
近年来,我国汽车保有量不断增加,据2021年9月统计,我国机动车数量达到3.90亿辆[1],道路中的拥堵问题和环境污染问题日渐严重,尤其在交叉口处,“停-走-停”式的状态几乎是车辆在运动中不可避免的。这会导致过度的燃油消耗、额外的安全隐患和行程延误[2]。随着人工智能、自动控制技术的发展,智能网联车辆对于提高道路的通行能力和效率成为近年来的研究热点,智能网联车辆可以对车辆运动状态进行分析和预测,采用最合适的轨迹优化策略和引导策略,尽可能地提高交叉口的通行能力,减少环境的污染[3]。本文基于当前研究现状,总结了目前混行车辆在车速控制策略和交叉口优化方面的研究。
1 混行车辆在信号交叉口处车速控制策略
1.1 车速控制系统
信号交叉口处车速控制系统[4]包括中央控制单元、智能网联车辆、信号配时信息、通信设施、车载单元等,该系统的通信范围为300 m左右。其中中央控制单元用于接收并处理车辆信息和信号灯信息,图1为信号交叉口车速控制流程图。
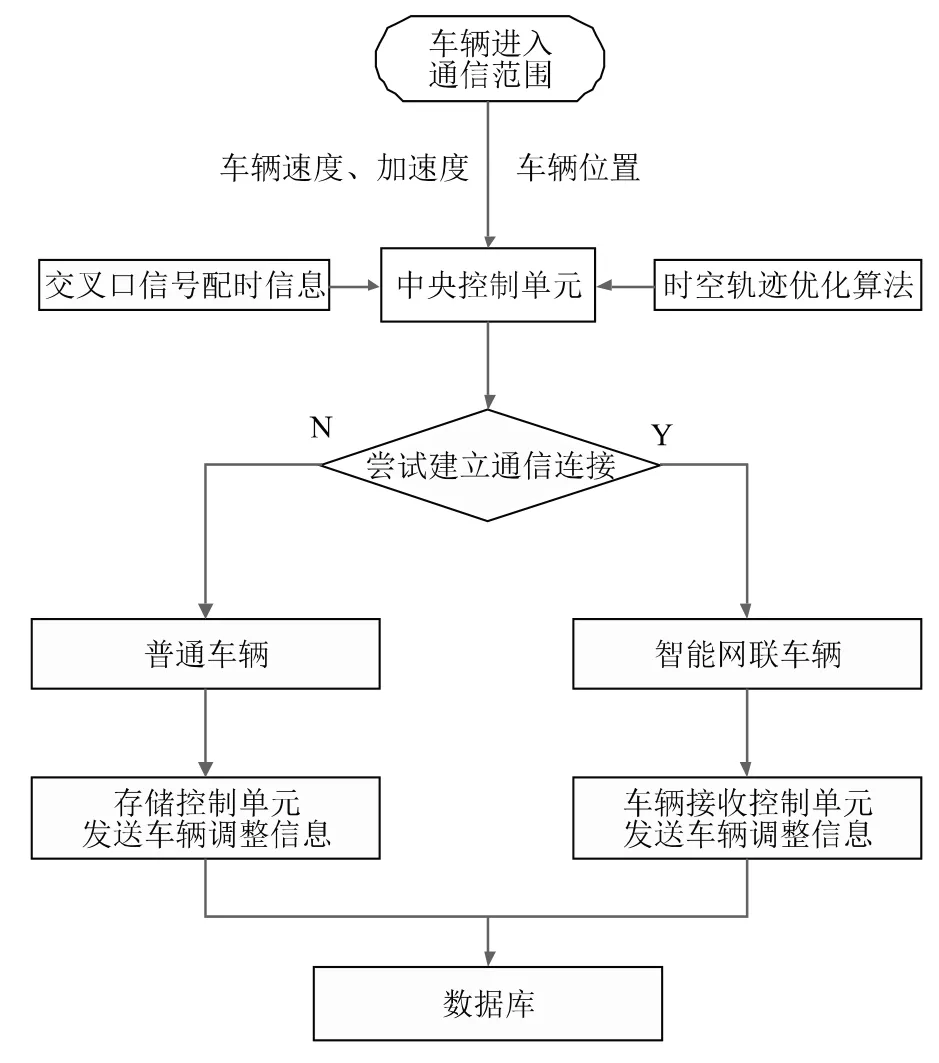
图1 信号交叉口车速控制流程图
1.2 车速控制策略
由于智能网联环境下车辆可以与交叉口控制中心进行实时的信息交互,鹿应荣等人[5]建立了信号交叉口处的车速控制策略,主要分为加速控制模型和减速控制模型。刘欢等人[6]建立了车-路协同环境下的速度引导策略,针对四种情况进行了不同的速度引导,即匀速通过、加速通过、减速通过、跟驰通过。李鹏凯等人[7]通过车路协同技术以交叉口处综合效益为优化目标,通过单车速度引导策略,提出了多车协同在信号交叉口处的速度引导模型。
ASADI等人[8]提出了一种基于优化的控制算法,通过使用雷达和交通信号信息来调度车辆的最佳速度轨迹,通过优化速度来减少未来车辆的燃油消耗和出行时间。LIU等人[9]提出了两种基于优化单车或多车行驶时间的速度导引算法,以最小化行程时间为优化目标,对车辆进行速度引导。该引导算法表明,互联车辆环境下的速度引导可以显著提高交叉口的交通效率,且多车速度引导策略比单车速度引导策略更有效。
常玉林等人[10]在交叉口处建立主路车优化模型和次路车优化模型,解决了次路车穿越主路车流量较大时交叉口的协同,提高了通行效率。安实等人[11]提出了一种基于多级可变速度限制的交叉口驾驶控制方法,使车辆通过交叉口的轨迹更加平滑,并尽可能地快速通过交叉口。该绿色驾驶车速控制方法有两种,即头车速度控制方法和车队的速度控制方法。
2 混行车辆在信号交叉口处优化设计
在信号交叉口处通过轨迹优化算法引导车辆轨迹,可以实现车道变化和合并时的最小速度变化和最小冲突,提高交通流的稳定性和效率。
信号交叉口的信号灯设计应满足交叉口的交通量需求,还要合理设置信号灯的配时来满足各进口道的交通量需求。因此,可以通过信号灯的相位优化、配时优化和空间优化来提高信号交叉口的通行能力。图2为信号交叉口处的行驶轨迹图。

图2 信号交叉口处的行驶轨迹图
2.1 混行车辆在信号交叉口处轨迹优化
WANG等人[12]提出了一种多交叉口道路中的智能网联车辆(Connected Autonomous Vehicle,CAV)协同式自主交通组织方法。同时为了适应动态交通需求,提出了一种通过协调道路网络中CAV的异构决策行为来进行路线规划的综合策略。HE等人[13]提出了智能网联汽车在交叉口处通过基于车道选择提前给定后以任意车道行驶,通过避免冲突的方法来协调不同方向的车辆。
在CAV环境中,基于V2V和V2I通信,将车辆轨迹进行优化和控制,车辆形成紧密的队列,HAN等人[14]研究了单个CAV的最优控制策略,设计了考虑各队列之间相互作用的多队列车辆通过信号交叉口的控制机制。HE等人[15]为了获得队列能量最优速度轨迹,提出了两种生态驾驶策略,即智能引导车基于加速度策略和手动驾驶引导车的逐步速度策略。
YU等人[16]提出了一个混合整数线性规划模型来优化CAV环境中单个信号交叉口的车辆轨迹和交通信号,基于优化车辆的到达时间确定准确的车辆轨迹,对于队列头车的轨迹规划,实现了以最小化油耗/排放为目标的最优控制模型。
2.2 混行车辆在信号交叉口处信号配时及空间
优化
交叉口的优化研究目前主要采用宏观交通仿真、微观交通仿真和中观交通仿真三种,其中微观仿真能够精确分析路网和车辆在交叉口处存在的问题,更加适合交叉口的研究。常见的仿真软件有VISSIM和SUMO[17]。
曹洁等人[18]通过考虑相邻交叉口之间的关系,将自适应遗传算法引入交叉口子区Agent中代替传统模型,计算得到最佳配时方案,通过交叉口的平均延误最短。WANG 等人[19]研究了一种自动信号相位设计生成器,它可以生成初始相位信号,并在必要时自动调整定时,及时使用交互式重新设计策略,调用了一组重新设计的规则,当平均延迟没有改善时,该过程停止。
为了优化交叉口的性能,交通系统的运行效率,申鑫泽等人[20]从时间与空间方面讨论了平面信号交叉口的优化方案。交叉口处增加预信号控制可以缓解交通拥堵问题,合理的预信号控制可以控制车流,车辆的行车区域空间增大,交通量较大时有较好的效果[21]。
3 总结与展望
3.1 总结
(1)信号交叉口处的车速控制策略目前主要是以加速控制策略、减速控制策略为基础,针对不同环境下对其进行优化,建立更合理的控制策略,在网联环境下利用多信息交互的特征尽可能的降低车辆的怠速时间,提高交叉口的通行能力。
(2)智能网联车辆时空轨迹优化系统可以使不同速度、不同行驶方向的车辆进入最优轨迹行驶,车辆间形成紧密的队列,以自由流速度通过信号交叉口。
(3)信号交叉口优化设计和交叉口配时设计密切相关,相互协调,大多以车辆的怠速时间、车辆延误、燃油消耗为目标对交叉口进行优化。
3.2 展望
(1)目前在网联驾驶环境下车辆通过连续性信号交叉口速度控制的研究相对较少,在今后研究中应研究考虑多车协同、多交叉口间的交互、车车交互的车速控制策略。
(2)智能网联车辆在信号交叉口处的轨迹优化未来可以研究考虑随机性和换道的动力学模型,考虑多车道交叉口的情况,将轨迹优化与信号配时相结合。
(3)交叉口优化是一个不断根据实际环境调整的过程,未来需要进一步考虑公交优先的交叉口车道划分和信号配时设计。
