固定翼无人机集群虚实结合半实物仿真系统的设计与实现
2022-11-29王洪涛王孟阳郑元世傅晋博
张 栋,王洪涛,王孟阳,郑元世,傅晋博
(1.西北工业大学航天学院,西安 710072;2.陕西省空天飞行器设计重点实验室,西安 710072;3.西安电子科技大学机电工程学院,西安 710071)
1 引 言
随着无人机技术的逐渐成熟,无人机集群化成为未来无人机作战的重要模式。无人机集群具有作战效能强、分布协同性高、抗毁伤重构性强、攻击成本较低等显著优势[1-2],使无人机集群协同作战逐渐成为未来战争的主流趋势,发挥着重要的作用,被认为是未来智能化战争最具潜力的作战样式之一[3]。
在无人机集群作战的相关研究领域,集群协同仿真技术发挥着关键作用。针对无人机集群作战相关算法的验证,往往都是基于传统数学仿真[4]、半实物仿真[5-6]以及集群飞行试验等方式。数字仿真通过 MATLAB等仿真技术软件,对相关研究对象的数学模型进行构建,并完成集群算法程序化实现,以计算机为基础完成集群算法和模型的高效数学求解,得到仿真对象的相关数据、曲线等。半实物仿真在全数字仿真的基础上,将仿真有关硬件实物加入到仿真回路中。在包含硬件实物的仿真系统中进行无人机集群在线仿真验证,通过相关通信方式与硬件实物连接来构成闭合仿真回路进行仿真验证[7-8]。相较于数字仿真,半实物仿真更加贴近无人机集群实物飞行结果。然而无人机集群的半实物仿真系统搭建比较复杂,实现大型固定翼无人机集群仿真验证困难,无人机集群算法研究周期增加,仿真实验设备成本增高。近年来,国内外开展了大量的无人机集群飞行验证[9],美国海军完成了 30架无人机集群编队飞行实验验证和 100多架微型无人机集群飞行实验[10];美国战略能力办公室完成了103架无人机集群自主决策和在线编队的飞行验证[11];印度进行了75架无人机集群作战飞行实验演示[12]。我国也积极开展很多固定翼无人机集群的飞行验证[13],中国电子科技集团(Electronics Technology Group Corporation)分别完成了67架、119架、200架的固定翼无人机集群飞行实验[14];国防科技大学针对无人机集群自主协同展开试验飞行[15];北京航空航天大学完成了基于狼群行为机制的无人机协同任务分配的飞行验证[16]。
通过集群飞行验证是无人机集群关键技术验证的最直接、最有效的方法,然而该方式周期长、成本高。针对无人机集群关键技术的仿真验证,国内外相关团队开展了大量的研究工作。文献[17]采用 JADE仿真环境,设计无人机集群的智能化仿真系统,实现复杂环境下无人机间通信和仿真测试;文献[18]提出了基于 PixHawk、Px4和外围设备的旋翼无人机和 Gazebo仿真结合的仿真平台和测试方法;文献[19]完成了通过虚拟模拟器在集成地理信息系中模拟无人飞行器飞行任务,该模拟器可实现无人机参数数据设定并建立无人机集群的可视化飞行;文献[20]基于MATLAB/Simulink等仿真软件,设计出无人机集群编队交互式仿真平台,实现无人机集群三维仿真可视化与语音、手势VR人机交互等功能;文献[21]基于xPC Target搭建无人机集群交互式虚拟仿真平台,实现集群在线仿真验证、三维视景推演和基于脑机接口的人机交互等功能;文献[22]基于DSP开发板、XBee通信模块和PC端,搭建出分布式架构的半实物仿真平台,完成集群分布式拍卖算法的硬件移植和在线仿真验证功能。文献[23]以分布式自组网架构和实物四旋翼微型无人机为基础,设计出全自主微型无人机集群系统,该系统侧重于小型化、实物化旋翼无人机集群飞行验证。文献[24]基于 ROS(Robot Operating System)机器人操作系统,应用模块化的软件结构设计,设计了一套模块化的集群无人机协同编队软件系统,以及基于四旋翼的集群无人机验证平台。国内外对无人机集群仿真平台的研究设计中,平台功能单一,缺乏综合性与仿真实际性。文献[20-21]构建的无人机集群虚拟仿真系统,仅以人机交互和三维视景为主要功能特点,与集群半实物仿真验证和飞行验证相比缺乏真实性。文献[22]实现大型固定翼无人机集群半实物仿真验证,有时间周期长、平台搭建复杂以及仿真成本高等缺点。文献[23-24]搭建的无人机集群系统,以四旋翼无人机集群飞行实验为侧重,集群算法验证周期长、实验成本高。因此,搭建一个分布式、实时性和综合可视化的无人机集群虚实结合半实物仿真系统对固定翼无人机集群在线仿真验证具有重要意义。
本文设计并搭建了实验室环境的无人机集群虚实结合半实物仿真系统,该虚实结合半实物仿真系统是由数字仿真和半实物仿真联合构建而成,主要包括无人机集群任务规划、在线自主决策、二维和三维可视化显示、人在回路控制、集群作战效能评估一体化和虚实结合在线仿真等功能。该系统对于无人机集群协同与自主控制方法的研究和发展具有十分重要的意义。为无人机集群任务分配、航迹规划和编队控制等算法提供了一个实时仿真环境,在线对算法的实时性、有效性、可行性进行测试和验证。虚实结合半实物仿真系统既可以节约无人机集群半实物仿真硬件设备成本,又实现了大规模固定翼无人机集群之间的协同配合在线仿真,提高无人机在线动态任务分配、实时航迹规划、在线编队控制、察打评一体化的集群控制仿真验证效率。
2 虚实结合半实物仿真的系统架构
本文的虚实结合半实物仿真系统架构如图1所示,其包括集群任务规划软件、实物系统、虚拟仿真系统、虚实结合自组网通信系统、飞行动力学半实物仿真软件、集群地面监控软件和动态推演视景仿真系统等模块,各模块之间相互嵌入耦合,构成虚实结合半实物仿真系统。

图1 虚实结合半实物仿真系统构架Fig.1 Architecture of hardware-in-the-loop simulation system based on virtual-real combination
集群任务规划软件具有无人机集群战场场景布置、人–集群指令集的构建、作战场景同步和集群装载预规划航路点等功能。实物系统仿真模拟无人机实物自主规划飞行场景。虚拟仿真系统基于数字仿真和固定翼无人机六自由度模型,实现无人机集群虚拟仿真功能。虚实结合自网通信系统构成无人机集群虚实结合半实物仿真系统的通信网络,为虚拟和实物联合仿真提供有效数据交互通道。飞行动力学半实物仿真软件为实物系统提供相关仿真参数,在实验室环境下,有效模拟无人机集群实物飞行过程。集群地面监控软件主要有集群视景航迹展示功能、飞行姿态界面可视化显示和集群仿真数据回传等功能。动态推演视景仿真系统主要有集群作战任务分配完成效能的评估、集群仿真场景同步和集群三维航迹飞行展示等功能。
2.1 实物系统组成
实物系统是由飞控装置、自组网数据链和智能规划器3部分组成。实物系统在虚实结合半实物仿真系统中负责完成无人机集群实物飞行验证功能。
(1)飞控装置用于固定翼无人机的飞行控制。该硬件模块是由传感器和高性能DSP处理器组成,主要完成姿态检测、位置检测、姿态控制、位置控制和任务控制等功能。基于高性能数字信号处理器设计,具有控制精度高、抗风性高强、运算速度快等特点,通过搭配高性能的IMU和高精度的GPS组合使用,具备良好的控制效果。
(2)自组网数据链具有高性能无线 MIMO(2×2)数据传输模块。该模块提供了多路抗干扰,从而在远距离通信时实现高速、大带宽的数据传输。通过自组网数据链可以高效地实现各无人机之间的数据交互,完成无人机集群内实时数据通信过程,保证无人机集群虚实结合半实物系统的有效在线仿真验证。
(3)智能规划器主要包括集群动态任务规划模块、任务分配模块、航迹规划模块和数据通信模块等功能模块。基于 DSPc6000系列核心处理器,把集群任务分配、航迹规划和编队保持及切换等算法加载到内部核心处理器中,实现无人机集群自主决策、在线任务分配和编队切换等作战模式。智能规划器的数据通信模块,主要负责与飞控端机和自组网数据链等硬件设备进行数据交互,有效保证各无人机之间的信息传递,为无人机集群在线动态规划和编队切换提供有效的数据通道。实物智能规划器如图2所示。

图2 实物智能规划器Fig.2 Physical intelligent planner
2.2 虚拟系统组成
由图1可知,虚拟系统是由集群任务规划软件、虚拟仿真系统、飞行动力学半实物仿真软件、集群地面监控软件和动态推演视景仿真系统等组成。
2.2.1 集群任务规划软件
集群任务规划软件模块是在GUI框架平台下基于 Qt和 C++编程联合开发,主要包括集群任务分配、航迹规划、场景构建、航迹检测、人–集群交互和数据通信等功能。该模块可以构建集群侦查、突防、打击和评估等作战场景,基于集群任务规划算法,完成无人机集群在线航迹规划和航路装订,并通过人–集群交互指令模块实现无人机集群在线动态规划调整,有效完成相应作战任务。集群任务规划软件界面如图3所示。

图3 集群任务规划软件界面Fig.3 Swarms mission planning software interface
2.2.2 虚拟仿真系统
虚拟仿真系统由虚拟自组网数据链模拟系统、蜂群在线任务规划模拟系统和固定翼无人机六自由度模型3部分组成。蜂群在线任务规划模拟系统通过构建并载入集群任务分配、航迹规划和编队控制及队形变化等算法模块,起到与智能规划器硬件模块相同的作用;固定翼无人机六自由度模型具有飞行控制、姿态控制和轨迹跟踪等功能,通过该模型可以创建多个虚拟飞控装置,有效模拟实物飞控装置功能;虚拟自组网数据链模拟系统是虚拟仿真系统内部各仿真无人机之间的数据交互通道。虚拟仿真系统采用数字仿真模式,可以实现与实物系统相同的集群仿真功能,又能自由扩展仿真无人机数量,在节约实验成本的基础上,实现大规模无人机集群虚实结合在线仿真验证。虚拟仿真系统功能结构图如图4所示。

图4 虚拟仿真系统功能结构图Fig.4 Functional structure diagram of virtual simulation system
2.2.3 飞行动力学半实物仿真软件
飞行动力学半实物仿真软件主要由无人机气动力仿真模型、姿态解算、仿真传感器和仿真数据通信等模块组成。其中,无人机气动力仿真模型主要负责为实物飞控装置提供仿真大气参数,保证飞控装置在仿真过程中可以有效且稳定地模拟无人机户外实际飞行状态,使半实物仿真更加接近于实际飞行;姿态解算模块和仿真传感器模块主要负责模拟无人机姿态感知和姿态解算功能,并基于仿真数据通信模块,发送解算好的仿真数据信息,即位置、速度、姿态角、加速度、角速度、空速等仿真数据给飞控装置。飞控装置将其内部的导航数据替换为仿真数据,进行无人机集群半实物仿真验证。飞行动力学半实物仿真软件界面如图5所示。

图5 飞行动力学半实物仿真软件界面Fig.5 Flight dynamics hardware-in-the-loop simulation software interface
2.2.4 集群地面监控软件
集群地面监控软件主要包括集群视景航迹展示、无人机仿真数据显示、飞行姿态实时显示、数据通信、自定义回传等功能模块。集群视景航迹展示模块主要负责无人机集群飞行航迹展示,在二维地图上实时显示集群航迹。无人机仿真数据显示和飞行姿态实时显示模块主要负责在集群地面监控软件上实时显示无人机的仿真数据和姿态数据。数据通信模块主要负责飞控装置和集群地面监控软件之间的飞行数据传输。自定义回传功能模块回传仿真数据到集群任务规划软件和动态推演视景仿真系统中,进行遥测数据的同步、二维和三维集群航迹展示。集群地面监控软件界面如图6所示。
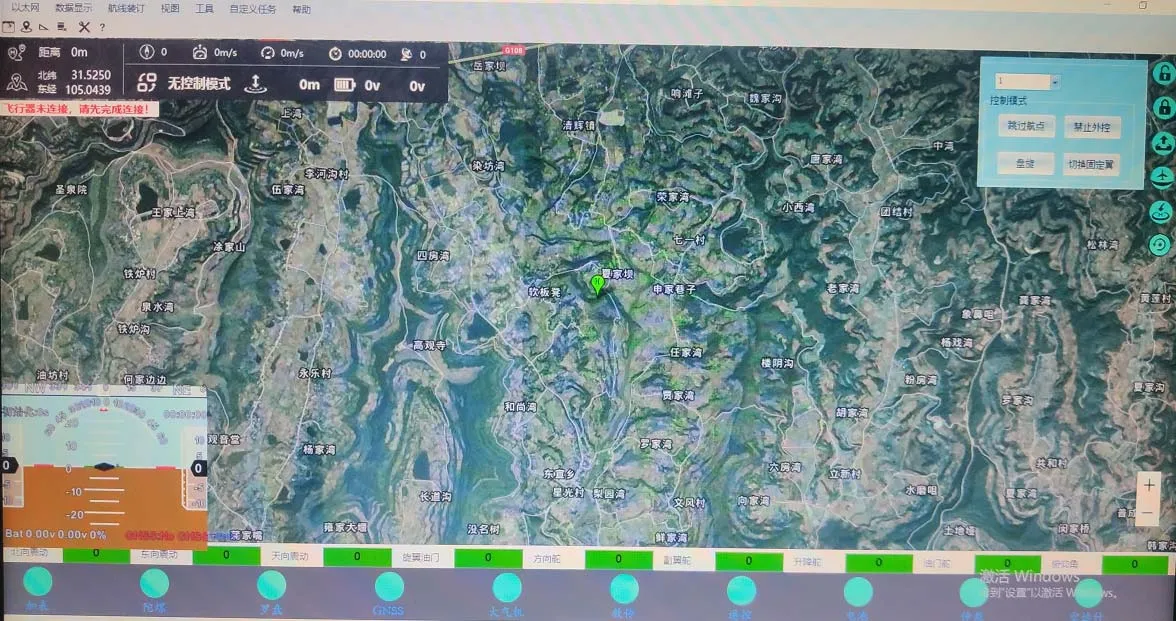
图6 集群地面监控软件界面Fig.6 Swarms ground monitoring software interface
2.2.5 动态推演视景仿真系统
动态推演视景仿真系统的主要功能有集群作战任务分配完成效能的评估、多任务作战能力的评估和集群三维航迹飞行展示等。通过集群作战场景的构建,以及集群地面监控软件发送过来的集群仿真六自由度数据,实时在线驱动无人机集群进行三维航迹推演展示。通过仿真航迹和数据在线分析,完成集群作战在线实时任务分配效能评估和多任务作战能力的在线评估,高效完成对无人机集群在线仿真算法的验证评估。动态推演视景仿真系统软件界面如图7所示。

图7 动态推演视景仿真系统软件界面Fig.7 Software interface of dynamic inferring visual simulation system
3 虚实结合半实物仿真关键技术
固定翼无人机集群虚实结合半实物仿真系统设计与实现过程中主要用到集群规划、虚实结合状态同步和虚拟自组网等关键技术。虚实结合半实物仿真关键技术结构图如图8所示。

图8 虚实结合半实物仿真关键技术结构图Fig.8 Key technology structure diagram of virtual combination and real hardware-in-the-loop simulation
3.1 集群规划关键技术
集群规划是无人机集群作战的关键技术,其研究重点是无人机集群、目标群和任务群之间的合理优化分配,实现集群任务分解、任务调度及航迹设计,是对集群有限资源的合理配置、分析和利用,进而实现无人机集群高效协同地完成任务。在无人机集群化作战过程中,任务分配和航迹规划等算法的设计是关键环节[25]。任务分配和航迹规划技术共同决定了无人机集群执行相应作战任务的顺序关系、集群与任务目标之间的映射关系和无人机集群可执行最优或相对最优航线等,是保障无人机集群拥有完成相应作战任务能力的关键技术。
任务规划是无人机集群协同作战的根基,其研究重点是任务、目标以及无人机之间的优化配置,实现对无人机集群具备的有限资源的合理配置、分析及利用达到任务的执行和求解。无人机集群任务规划基于本次作战任务的战场环境信息和任务的具体需求,对集群系统中的各个无人机分配一个或一组任务序列,从而保障无人机集群在执行相应作战任务时,可以有序地进行无人机个体与集群之间的协作,以保证完成任务。
航迹规划是无人机集群执行任务的基础,航迹规划的目的是在无人机能源、飞行性能以及地理环境等条件下,考虑到集群飞行的机间安全距离、编队保持以及协同任务等多种约束条件,规划出一条最优或次优的无人机飞行航迹,尽可能地发挥无人机集群协同作战优势,完成预期作战任务。
3.2 虚实结合状态同步关键技术
在无人机集群虚实结合半实物仿真系统设计过程中,保证实物系统与虚拟系统仿真状态同步一致与时钟一致是进行虚实结合联合同步仿真的关键点。针对以上两个问题,该仿真系统设计并采用3个策略,保证实物系统和虚拟系统联合,同步完成固定翼无人机集群在线虚实结合半实物的仿真。
首先,采用固定翼无人机六自由度模型一致策略,即保证虚拟系统中的无人机六自由度模型与硬件实物飞控装置内部的飞行动力学模型一致,该策略是虚实结合半实物仿真的基础。其次,采用数据包计算速度步进方式同步的策略,即虚实结合仿真状态一致策略,保证虚拟系统中固定翼无人机六自由度模型计算每一帧数据的速度与实物飞控装置内部模型计算每帧数据的速度一致;同时使虚拟系统和实物仿系统输出六自由度仿真数据时间频率一致,本文虚实结合半实物仿真系统采用30 ms每包数据传输速率。最后,应用虚实系统时钟一致策略,即虚拟系统与实物系统采用相同系统时间,即上位机系统时间,且虚拟仿真系统与实物仿真系统的仿真同时开始。
通过以上3个策略对固定翼无人机集群虚实结合半实物同步仿真起到了有效的保障,确保无人机集群虚实结合的半实物仿真系统对集群算法进行实时同步在线验证。
3.3 虚拟自组网关键技术
虚拟自组网数据链是基于Socket和UDP组播原理,应用C++编程构建的数字通信网络系统,并通过无人机集群通信协议制定,完成虚拟自组网数据链构建。虚拟自组网模拟实物自组网数据链通信功能,在实验室仿真环境下,有效实现虚拟仿真系统内无人机集群数据的交互功能。
基于自组网数据链模拟系统和硬件自组网数据链联合构成虚实结合自组网通信系统,通过该虚实结合自组网通信系统可以有效模拟虚实结合半实物仿真系统内各无人机之间和无人机集群之间数据交互过程。通过该网络实现基于集群任务规划软件的人–集群在线动态交互控制,完成虚实结合无人机群实时在线任务分配、动态队形变换和航迹规划等任务。对复杂战场环境下的多种集群任务进行合理分配,进一步保证无人机集群更快速更有效地实现复杂环境下的相应作战任务。
为了保证进行无人机集群算法验证时,各个无人机航路点数据传输效率在该虚实结合自组网通信系统内可以得到最大化的利用。虚实结合自组网通信系统应采用主从式和分布式相结合的无人机集群分簇策略和分时分批传输航路点数据包策略,有效地减少了虚实结合自组网数据链通信系统的数据包传输压力,提高整个网络系统的传输效率。
4 系统应用示例
4.1 虚实结合系统介绍
根据图1所示的虚实结合半实物仿真系统构架设计方案,搭建出虚实结合半实物仿真实验布置,如图9所示。

图9 虚实结合半实物仿真实验布置Fig.9 Experimental arrangement of hardware-in-the-loop simulation based on virtual-reality combination
无人机集群虚实结合半实物仿真系统在线仿真验证过程如下。
(1)首先由集群任务规划软件进行无人机集群仿真战场任务构建,并通过网络通道同步集群战场任务场景到动态推演视景仿真系统上,完成场景同步功能。集群任务规划软件基于任务规划算法生成预规划航路点,通过Socket和组播原理把集群任务规划软件的通信模块接入到虚实结合自组网通信系统中。基于制定的数据驱动协议,通过虚实结合自组网通信系统把相应无人机的预规划航路点装载给实物系统的智能规划器和虚拟仿真系统的蜂群在线任务规划模拟系统。智能规划器和蜂群在线任务规划系统接收全自身对应各个实物无人机或虚拟无人机的预规划航路点,完成无人机集群预装载航路点过程。
(2)无人机集群装载好航路点后,控制实物系统和虚拟系统开始虚实结合联合同步在线仿真。通过飞行动力学半实物仿真软件在线控制实物系统的起始和结束,并通过虚拟仿真系统控制虚拟系统开始。虚实结合半实物仿真开始后,智能规划器基于数据传输通信协议和硬件串口,完成与飞控装置和自组网数据链等硬件设备的数据交互与数据更新;蜂群在线任务规划模拟系统基于内部程序逻辑,实现与虚拟飞控和虚拟自组网数的在线交互过程;通过虚实结合自组网数据链通信系统实现各无人机之间和无人机群与群之间的信息交互。同时,集群任务规划软件通过该通信系统完成人–集群交互功能,完成无人机集群在线动态规划和任务分配等作战任务调度功能。虚实结合半实物仿真系统通过硬件通信链路和网络通信,把集群六自由度仿真数据发送到集群地面监控软上,进行无人机集群仿真航迹展示。
(3)当仿真数据传输到集群地面监控软件上时,集群地面监控软件实时显示无人机的集群仿真航迹和姿态飞行数据。同时,集群地面监控软件回传仿真数据到集群任务规划软件和动态推演视景仿真系统中,完成遥测数据的同步、二维和三维集群航迹展示等功能。通过动态推演视景仿真系统实现集群作战任务分配完成效能的评估、多任务作战能力的评估。虚实结合半实物仿真系统构成一个包含无人机集群相关算法在线仿真验证、航迹展示和作战效能评估等功能的闭合回路平台。通过不同的软件全方位地显示集群的仿真飞行航迹,多角度地分析验证无人机集群任务分配、航迹规划、编队控制和队形变换等算法的效能,完成真实集群复杂场景中各个无人机的有效任务调度,确保集群算法的实时性和有效性。
4.2 应用场景
为了验证本文设计的固定翼无人机集群虚实结合半实物仿真系统的实时性、有效性和稳定性,搭建了 32架固定翼无人机集群虚实集合半实物仿真飞行实验场景。该实验场景包括5套实物飞控装置、自组网数据链以及智能规划器的实物系统和27套虚拟飞控装置的虚拟仿真系统。两系统之间基于虚实结合自组网通信系统实现无人机集群之间的数据交互。虚实结合半实物仿真系统示意如图10所示。

图10 集群虚实结合半实物仿真系统示意图Fig.10 Schematic diagram of UAV hardware-in-the-loop simulation system based on virtual-reality combination
32架固定翼无人机集群虚实结合半实物仿真过程如下。
(1)基于集群任务规划软件完成 32架无人机集群战场突防、侦查、打击等场景的构建。本实验把32架无人机划分为4个无人机群,通过任务规划算法完成 32架无人机预规划航路点的生成,并装订航路点到虚拟仿真系统和实物系统中,完成虚实结合半实物仿真的准备工作。32架无人机集群作战场景构架图如图11所示。

图11 32架无人机集群作战场景构架图Fig.11 Swarms operation scenario architecture of 32 UAVs
(2)虚拟仿真系统中的蜂群在线任务规划模拟系统和实物系统中的实物智能规划器装载好自身对应的无人机航路点后,启动虚实结合半实物仿真系统。仿真系统生成的六自由度仿真数据通过串口转网口和 UDP等方式传输到集群地面监控,进行32架无人机集群二维航迹显示。通过集群地面监控软件来分析集群任务规划算法的可靠性。32架无人机集群地面监控软件二维展示图如图12所示。

图12 32架无人机集群地面监控软件二维展示图Fig.12 2D display of swarms ground monitoring software of 32 UAVs
(3)集群地面监控软件在显示 32架无人机集群仿真航迹时,可通过无人机数据监控模块,实时监控虚实结合系统传输过来的实时集群仿真数据。该模块包括无人机姿态实时显示功能和无人机仿真数据显示功能,有效提高集群仿真数据的准确性与可视化性。集群地面监控软件的数据监控界面如图13所示。

图13 集群地面监控软件的数据监控界面Fig.13 Data monitoring interface of swarms ground monitoring software
(4)集群地面监控软件在进行集群航迹与仿真数据可视化显示的同时,基于集群地面监控软件的自定义任务回传界面进行集群仿真数据回传,遥测回传飞行信息和姿态信息等仿真数据到动态推演视景仿真系统和集群任务规划软件,分别进行集群二维三维航迹同步展示。虚实结合仿真平台由集群地面监控软件性能限制,目前支持32节点数目无人机集群虚实结合半实物仿真。32架无人机集群地面监控软件的自定义遥测回传界面如图14所示。32架无人机集群动态推演三维航迹展示图如图15所示。

图14 32架无人机集群地面监控软件的自定义遥测回传界面Fig.14 Custom telemetry return interface for swarms ground monitoring software of 32 UAVs

图15 32架无人机集群动态推演三维航迹展示图Fig.15 Swarms dynamic inference 3D track display of 32 UAVs
(5)为了保证无人机集群虚实结合半实物仿真系统的真实性,提高系统仿真精度,在系统中接入飞行动力学半实物仿真软件。通过该软件实时解算仿真数据,并把仿真大气参数数据传输给实物飞控装置,保证实物飞控装置将内部的导航数据替换为仿真数据,有效仿真模拟无人机户外实际飞行状态,使5架半实物仿真无人机更加接近实际飞行。再通过与27架虚拟无人机联合集群仿真,保证无人机集群虚实结合半实物仿真系统的仿真精度。飞行动力学半实物仿真软件上5架无人机实时仿真参数界面如图16所示。

图16 飞行动力学半实物仿真软件上5架无人机实时仿真参数界面Fig.16 Real-time simulation parameter interface of 5 UAVs in flight dynamics hardware-in-the-loop simulation software
从固定翼无人机32架无人机虚实结合半实物仿真的结果得出,该仿真平台具有很好的实时性、稳定性和真实性,可以有效保证相关无人机集群算法的验证,降低实验验证成本,缩短算法开发周期。
5 结束语
针对固定翼无人机集群在复杂多变的作战场景下,完成在线任务分配、任务决策、动态航迹规划、队形变换、侦查、打击和评估于一体的无人机集群仿真问题,提出了无人机集群虚实结合半实物仿真系统的设计和实现方案。在实验室的环境下,基于实物系统、虚拟仿真系统、集群任务规划软件、飞行动力学半实物仿真软件、集群地面监控软件和动态推演视景仿真系统,搭建出一个结合数字仿真和半实物仿真的无人机集群算法在线仿真验证、航迹展示、人机交互和作战效能评估一体化的闭合回路虚实结合半实物仿真平台。该平台有效节约无人机集群半实物仿真硬件设备成本,实现大型无人机集群之间的协同配合在线仿真。通过设计32架4簇无人机集群作战的仿真场景,验证了该虚实结合半实物仿真平台的实时性和稳定性。
本文设计的固定翼无人机集群虚实结合半实物仿真系统功能仍有提升空间,在后续研究设计工作中,实现实物机载传感器的接入,完成对无人机集群战场态势信息注入和集群决策依据库设计,使无人机集群依据战场态势信息,灵活实现无人机集群在线自主决策、任务分配和航迹自主规划等功能。
