光电测量方法在盾构隧道收敛监测中的可行性研究
2022-11-27赵宁宁王嘉伟尤相骏贺子瑜姜雷雷
赵宁宁,王嘉伟,芦 斌,尤相骏,贺子瑜,姜雷雷
(1.宁波市轨道交通集团有限公司,宁波 315101; 2.浙江华展工程研究设计院有限公司,宁波 315012)
引言
城市轨道交通在人们的日常生活中占据着极其重要的地位,保障轨道交通安全平稳运营关系到国家和人民的生命财产安全,因此,在地铁隧道运营过程中,需要定期对隧道结构进行安全质量评估,以确保地铁的安全运行[1-2]。由于外界因素干扰以及自然地层变形,地铁隧道结构可能产生纵向及横向变形,超过变形限差,会引发一定的灾害,需要定期对隧道进行监测[3-5]。
近年来,随着三维激光扫描技术的发展,地面三维激光扫描技术以其独特的优势得到快速应用,可以获取大面积、高精度的建构筑物点云数据,并为后续的建筑物建模提供基础数据[6-8]。三维激光扫描技术可以获取高精度点云数据,能够全面反映隧道内建筑的细节信息,在一定程度上可以避免传统变形监测中的人为因素以及其他环境因素[9-11]。
基于三维激光扫描技术在地铁隧道内的监测应用,国内外学者已有一定研究。文献[12]提出基于空间圆柱迭代拟合的隧道点云数据提取中轴线的算法,该算法的中轴线定位点提取误差为±3 mm;文献[13]提出一种基于点云的隧道三维建模算法,并应用到单空间隧道中,获得隧道的相对变形;文献[14]从地铁隧道数据采集、三维模型建立、数据处理、成果输出等方面加以分析,阐述快速获得隧道管片变形量的一种方法;文献[15]利用GRP 5000隧道动态扫描系统来实现隧道的变形监测,并利用全站仪检验其监测结果的精度,相较于传统隧道变形监测方法,移动三维激光扫描技术具有数据采集效率高、测量精度不受外界影响,隧道变形分析全面等优势,更适用于监测环境恶劣,天窗时间短的运营地铁隧道;文献[16]采用德国Z+F 9012相位式三维激光扫描系统,提出一种全新的轨道交通运营期隧道监测方案,通过与传统监测成果的对比分析表明,移动三维激光测量系统在满足监测精度要求情况下,能够提高监测效率、增强安全保障,符合我国日益增长的地铁隧道监测需求。为确保地铁的安全运营,利用瑞士Amberg Profiler5033(德国Z+F 5010的OEM产品)相位式三维激光扫描系统、徕卡TS60全站仪以及徕卡D2手持测距仪等仪器获取圆形盾构隧道横径数据,并对比分析3种方法隧道横径测量值的差异。
1 三维激光扫描数据获取
1.1 使用设备与技术参数
三维激光扫描技术通过激光扫描测量方法,快速获取被测对象表面的三维坐标信息及其他细节信息[17-18]。本文采用Amberg Profiler 5033三维激光扫描仪,具体参数见表1,激光雷达隧道测量检测软件(LTIS,Lidar Tunnel Inspection System)采用绝对定位法(APM,Absolute Positioning Method)静态设站方式获取与隧道设计施工坐标系一致的隧道三维扫描激光灰度点云。
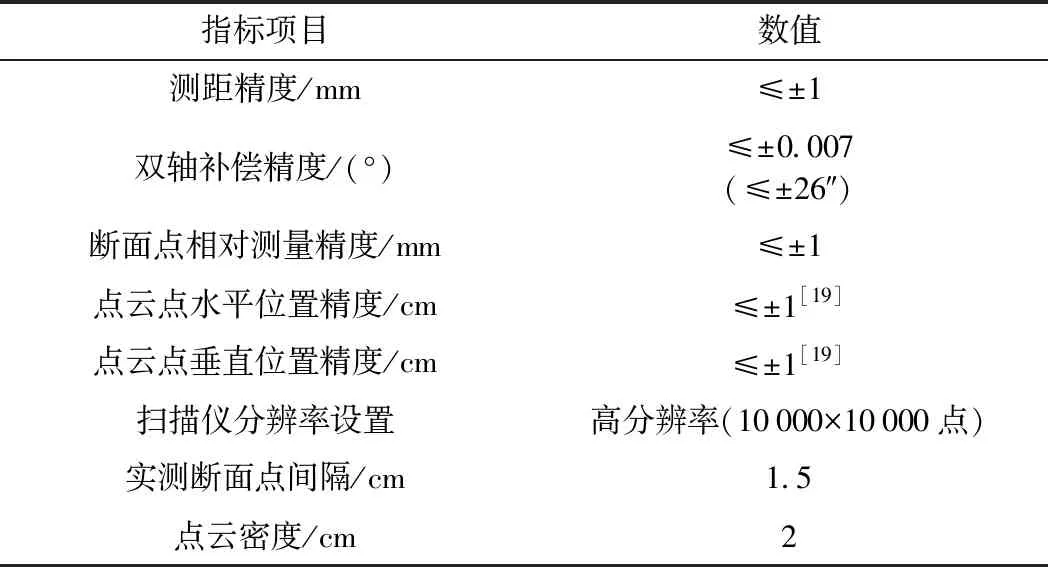
表1 扫描仪参数指标
1.2 绝对定位法静态设站三维扫描
基于地铁隧道CPⅢ控制点,利用徕卡TS60全站仪自由设站法设站定向后,测得扫描仪两个棱镜,以及靶球中心的CPⅢ坐标系坐标。在扫描仪工作前,由司镜人员安置全站仪棱镜、扫描仪棱镜及靶球,安置位置如图1所示。作业时,扫描仪司仪人员架设整平好扫描仪,将扫描仪基座上的2个棱镜对准全站仪方向,然后将半球棱镜的半球一面朝向扫描仪,棱镜的一面朝向全站仪,即可开始扫描。此时面朝隧道大里程方向,位于扫描仪基座左手的棱镜称为1号棱镜,右手棱镜为2号棱镜,半球棱镜为3号棱镜(此测量点号命名规则为便于内业使用软件中的点云APM定位功能,对测站点云批量自动传递CPⅢ坐标系坐标而无需点云拼接)[19]。
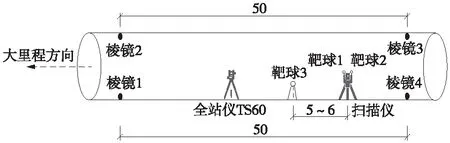
图1 绝对定位法静态扫描现场布置(单位:m)
2 点云数据处理
2.1 技术流程
外业点云数据采集完成后,点云和全站仪测得的每个扫描测站两个棱镜和靶球中心的坐标数据导入激光雷达隧道测量检测软件(LTIS),先完成点云绝对定位,再进行隧道轴线输入、点云线路里程投影、根据线路里程提取断面、断面椭圆拟合与杂点过滤,然后导出断面点数据。最后使用断面变形分析软件对上一步处理导出断面实测点云进行椭圆拟合,提取实测断面0°、45°、135°方向轴径特征点并计算这些轴径数值[20],操作流程如图2所示。
2.2 断面提取
本文采用LTIS软件按照线路设计轴线截取管环环中+0.1 m位置点云正交断面切片(切片里程方向厚度为2 cm)投影到切片中心里程处形成点云“压薄”后的二维断面图,并用软件过滤非环片结构杂点,输出杂点过滤后的实测vs设计点云断面效果如图3所示。
使用断面变形分析软件,断面测点图(包含0°、45°、135°内径及隧道拱顶最高点与横径左右端点连线距离)、自动拟合椭圆生成椭圆拟合断面图和断面点位变形曲线图,如图4所示。
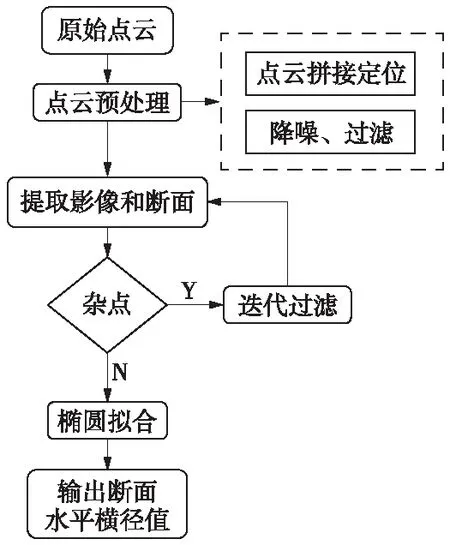
图2 点云处理流程
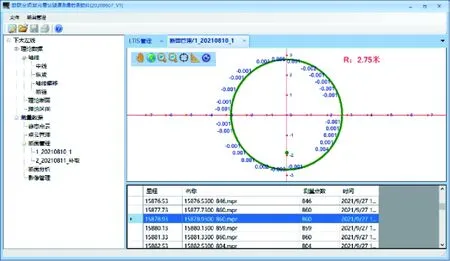
图3 点云断面过滤后效果
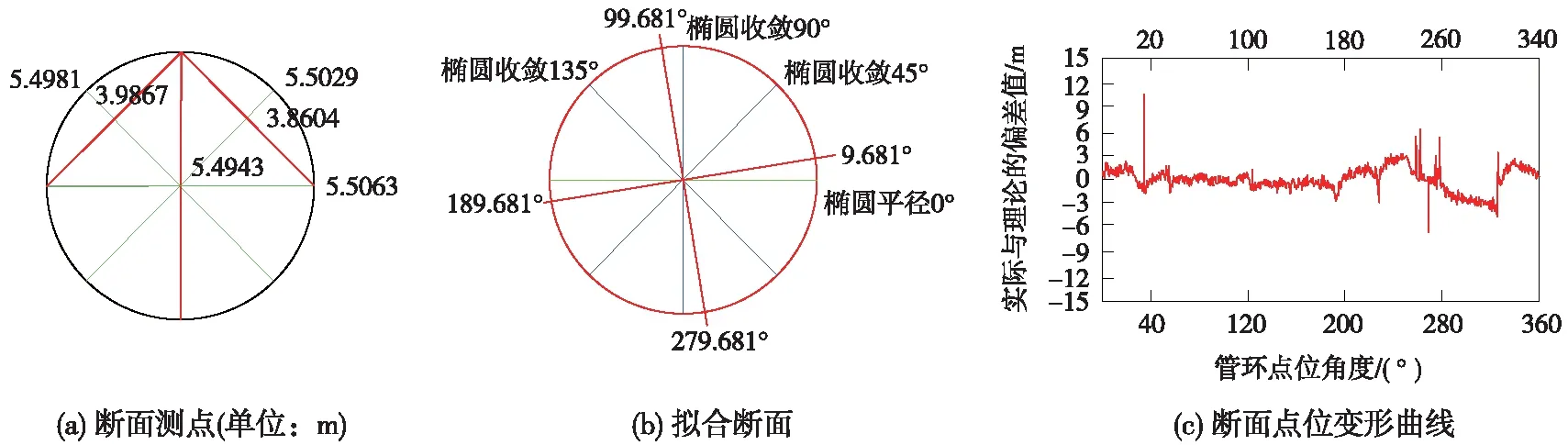
图4 自动拟合椭圆点云成果
通过图4可以判断软件拟合椭圆的质量,以及输出隧道断面图和横径值等相关几何特征点提取、特征值计算与椭圆拟合成果。
3 三种方法测量结果对比与分析
3.1 全站仪与测距仪获取横径值
使用徕卡TS60全站仪免棱镜测量模式和徕卡D2激光测距仪测量隧道横径值与三维激光扫描获得结果进行对比。其中全站仪免棱镜测距精度为:±(2 mm+2 ppm),测距仪标称精度为±1 mm。
利用全站仪和测距仪测量横径值应同时进行。将全站仪架设于某一环片正中间位置,基于全站仪自带的点到点免棱镜测距功能,获取隧道横径(一般选取两侧环片注浆孔的位置),并标记该测点位置;将测距仪紧贴于环片中间管壁上(全站仪测量标记的位置),每次测量应进行实测精度符合性检查,并应进行3次独立测量,且3次独立测量较差小于测距标称精度的2倍(即±2.0 mm),记录3次独立测量的结果。
3.2 三种方法测量结果对比分析
本次选取某城市圆形盾构区间进行数据采集,对数据进行预处理,剔除粗差。


表2 激光扫描仪与全站仪收敛变形差异值分析

表3 激光扫描仪与测距仪收敛变形差异值分析

表4 全站仪与测距仪收敛变形差异值分析
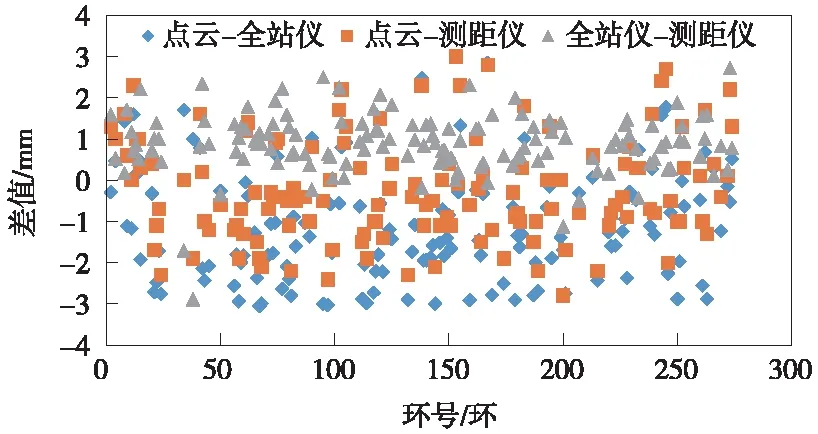
图5 三者收敛差异值点位
图7为三者之间差异值的正态分布,由图7可知,针对三者差异值均在±3 mm进行统计,扫描仪与测距仪差异值均值为-0.2 mm,标准差为1.26,扫描仪与全站仪差异值均值为-1.1 mm,标准差为1.37,全站仪与测距仪差异值均值为0.9 mm,标准差为0.74。由此可知:三维激光扫描仪和测距仪直接测量的横径值差异最小,且分布区间较为集中;三维激光扫描仪与全站仪免棱镜测量的横径值差异较为分散;全站仪免棱镜测量与测距仪测量的横径值差异较小,分布区间较为集中。经过对比分析隧道横径值,可知三维激光扫描仪和测距仪测量效果优于全站仪免棱镜测量。

图6 三者收敛差异值区间分布饼状图(单位:mm)
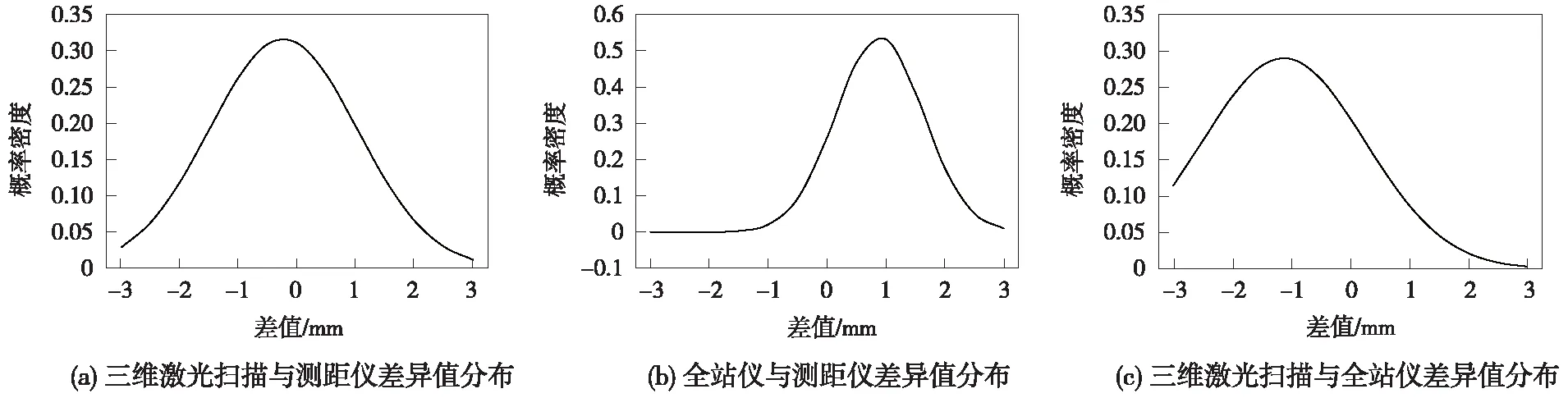
图7 三者之间差异值的正态分布
通过对比3种隧道横径测量值的差异,分析得出各测量方法均可用于地铁隧道收敛变形监测。经过分析3种差异值可知,另外两种方法与全站仪免棱镜测量方法产生的差异值较大。这是由于TS60全站仪的亚毫米级精度是基于棱镜测量模式,而不是免棱镜测量模式。TS60全站仪免棱镜模式测距精度为2 mm+2 ppm,低于三维激光扫描仪与手持测距仪的1 mm测距精度。
4 结语
本实验以某城市地铁圆形盾构区间隧道为试验对象,采用三维激光扫描仪、徕卡TS60全站仪和徕卡D2手持测距仪等3种仪器获取地铁隧道横径值,并对其结果进行对比分析。试验研究结果表明:3种测量方法均可以满足地铁隧道收敛变形监测指标要求;针对测量误差在±3 mm内,三维激光扫描仪和测距仪直接测量的横径值差异最小,且分布区间较为集中;三维激光扫描仪与全站仪免棱镜测量的横径值差异较为分散;全站仪免棱镜测量与测距仪测量的横径值差异较小,分布区间较为集中。综合可知:三维激光扫描和测距仪测量效果优于全站仪免棱镜测量;三维激光扫描和手持测距仪两种隧道横径测量方法在技术与精度上是完全可行并且可靠的。
