移动测量系统在地形图成果检验中的应用
2022-11-26焦字军景国峰李文超
焦字军,景国峰,崔 涛,李文超,吴 迪
(1.山东正元数字城市建设有限公司,山东 烟台 264670)
三维激光扫描技术是20世纪90年代中期出现的一项技术,车载三维激光移动测量系统是三维激光扫描技术的一次革新[1]。该系统由多种高精度传感器组成,可快速获取物体的三维点云信息和影像信息。在载体移动过程中,GPS系统负责实时获取WGS84坐标,惯性导航系统自动获取姿态信息;外业采集时,GPS接收机对惯导的姿态、三维激光扫描器获取的点云信息以及全景相机获取的高清影像进行处理,从而获得高精度定位定姿数据和高密度三维点云数据。本文将三维激光移动测量系统应用于地形图质检工作中,解决了传统检测方法工作量大、人力成本高等问题。
1 设备概况
本次地形图质检工作采用武汉海达数云技术有限公司生产的ARS-1000L。硬件部分由激光扫描仪、惯导系统、全景相机和GNSS组成,搭载在SUV上(图1),可实现三维激光点云数据获取、纹理特征采集、定位定姿等功能,主要参数如表1所示;软件部分由点云融合软件、点云处理软件、点云建模软件、街景生产软件、操控软件等组成,可实现全景影像与三维点云获取、车载轨迹解算、数据处理等功能。

表1 ARS-1000L系统参数

图1 车载三维激光移动测量系统
2 检验方案
传统地形图成果检验的工作内容为数学精度检查、数据与结构正确性检查、地理精度检查、整饰质量检查和附件质量检查,主要工作量集中于数学精度、地理精度的检测。数学精度检测主要利用全站仪、RTK对检测点进行坐标采集,工作效率较低;地理精度检测主要利用人工进行野外巡视,人工成本高。
陆玉祥[2]等研究了车载移动测量系统在大比例尺地形图数学精度检测中的应用;李俊[3]等研究了车载移动测量系统在大比例尺测图中的精度控制;黄昌狄[4]等研究了移动扫描系统在1∶2 000地形图成果检验中的应用,为质检工作提出了新方案。本文结合传统地形图检验工作流程,提出了利用ARS-1000L三维激光移动测量系统代替传统检验手段进行数学精度质量元素检查、利用全景影像辅助地理精度检查的方法,从而完成了对单位成果和批样本的质量评定,有效提高了地形图成果检验工作的效率。
2.1 方案设计
本文设计的质检方案工作流程如图2所示。

图2 质检流程图
2.2 点云数据采集
进行外业数据采集前,首先需对测区进行踏勘,了解测区内的交通状况;然后根据踏勘情况规划采集路线;再按照规划的采集路线进行数据采集,以40 km/h的速度行驶,确保点云密度满足要求。数据采集流程如图3所示。

图3 数据采集流程图
2.3 点云数据处理
数据处理工作主要包括POS解算、融合解算、全景拼接和数据预处理4个部分[5]。外业数据采集完成后,对POS轨迹数据进行解算,将基站数据和GPS数据转换为融合软件支持的文件格式,并生成POS格式文件;再对原始影像、点云数据、导航数据进行融合处理,获取真彩点云数据,得到可量测的全景影像。数据预处理主要包括点云过滤、点云分类、影像与点云配准和数据格式转换等过程[6-7],利用HD_3LS_SCENE软件完成点云数据从WGS84坐标系到CGCS2000坐标系的转换、影像与点云数据的配准。三维激光点云数据如图4、5所示。
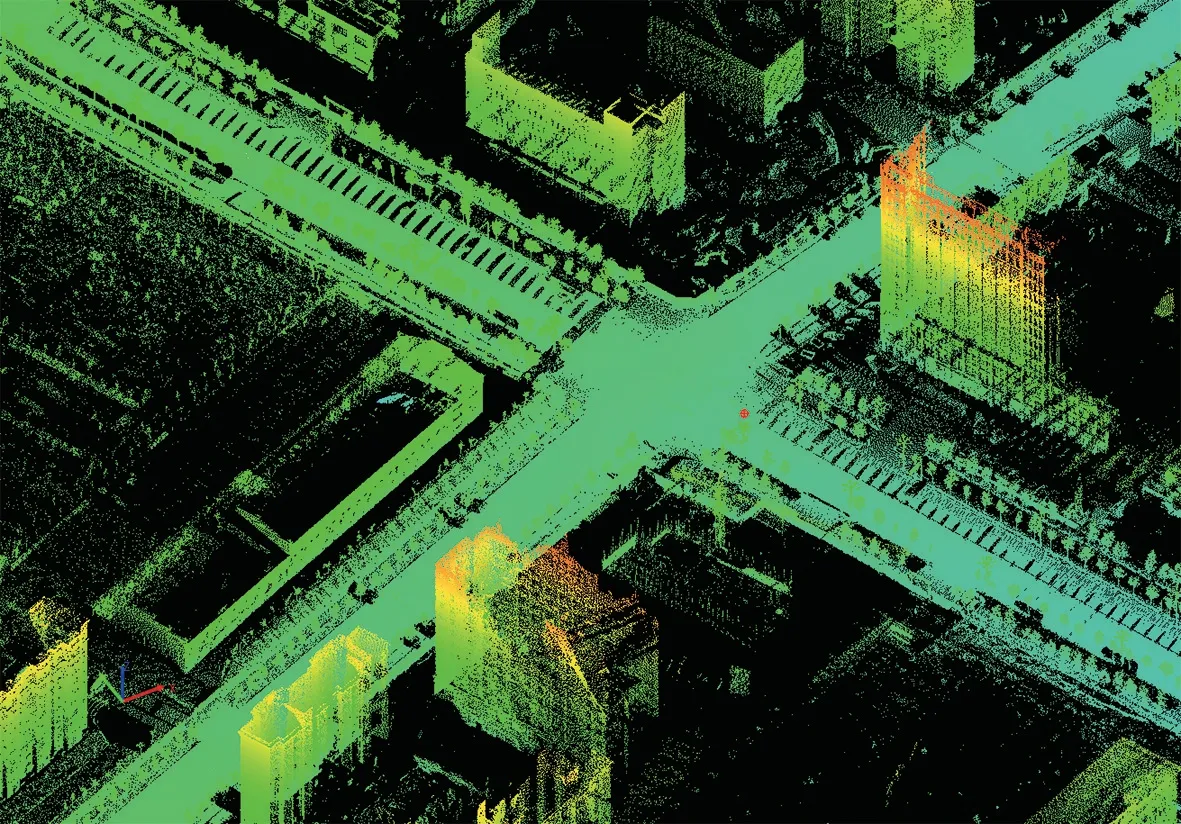
图4 三维激光点云(俯视)

图5 三维激光点云(侧视)
2.4 点云精度分析
2.4.1 测区概况
测区位于山东省临沂市罗庄区,主要为村庄,面积为0.375 km2。本文分别利用三维激光移动测量系统和拓普康102N全站仪进行数据采集。
2.4.2 精度统计情况
本文共采集186个平面精度检测点和135个高程精度检测点,涉及6幅图(1∶500比例尺)。根据GB/T 18316-2008《数字测绘成果质量检查与验收》的规定,高精度检测时,中误差的计算公式为:

式中,M为中误差;n为检测点个数;Δi为较差。
本文分别采用三维激光移动测量系统与拓普康102N全站仪对检测点进行检测,得到两种方法的检测结果如表2、3所示,可以看出,三维激光移动测量系统得到的成果平面中误差达到1/3标准中误差,高程中误差达到1/5标准中误差,与拓普康102N全站仪的采集精度相近,说明点云的精确度在误差范围内可作为真实数据,因此该方法可作为质量检测的标准方法。

表2 三维激光移动测量系统检测精度统计表

表3 拓普康102N全站仪检测精度统计表
2.4.3 精度影响因素
移动测量系统的测量原理为极坐标法,即利用极坐标计算公式,通过激光器发射的水平方位角、竖直角、激光测距结果和激光器中心坐标4个数据计算得到待测点的空间三维坐标。待测点坐标的计算公式为:

式中,S为测距值;α为水平方位角;θ为竖直方位角;X、Y、H为激光器中心点坐标。
通过分析发现,影响精度的主要因素为:
1)测距精度。激光器测距精度直接影响系统整体测量精度,该精度无法通过有效的数学公式平差修正,因此点云数据采集工作应在厂家给定的测量距离范围内才能保证测距精度。
2)测角精度。由极坐标公式可知,观测距离越远,测角精度对系统精度的影响越大,因此缩小观测距离可提高测角精度。
3)激光器中心点坐标精度。影响定位结果的因素较多,主要受高层建筑遮挡、多路径效应等影响,因此数据采集时应避开遮挡GPS信号的区域和大面积水域。
4)车速影响。车速不均匀将导致点云数据不均匀,进而直接导致后期点云数据采集不准确,因此应提前规划好路线、控制好车速。
2.4.4 质检效率对比
为了验证三维激光移动测量系统进行地形图质检工作的效率,将其与传统质检工作的人工量进行对比分析,结果如表4、5所示,可以看出,利用三维激光移动测量系统进行地形图检验在工作效率上有明显优势。

表4 移动测量系统人工统计表
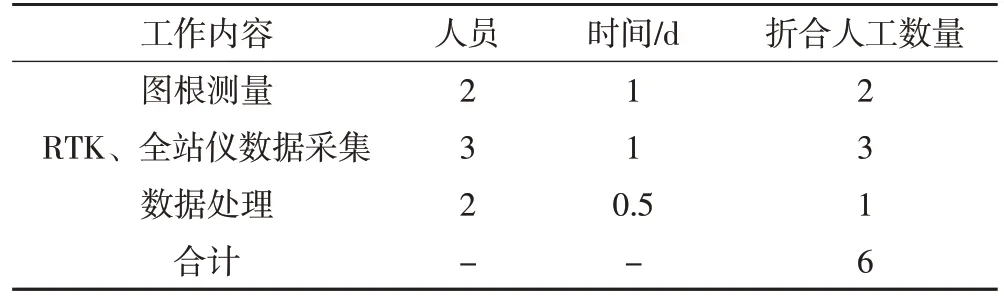
表5 传统方法人工统计表
3 结语
本文将三维激光移动测量系统应用于大比例尺地形图检验工作中,对其数学精度与影响精度的因素进行了分析;并通过与全站仪等传统检验方法进行对比,得到的结论为:①利用三维激光移动测量系统进行地形图检验工作能满足规范要求;②本文的测区范围为6幅图(1∶500比例尺),面积为0.375 km2,三维激光移动测量系统比传统方法节省了5个人工,优势并不明显,但在大面积质检工作中,三维激光移动测量系统在所需人工量方面具有较大优势;③本文对三维激光移动测量系统在地形图检验工作中的应用进行了分析、论证,能为地形图检验项目提供一定的借鉴。
