基于级联模糊控制的永磁同步电机直接转矩控制
2022-11-25张猛
张 猛
(镇江技师学院,镇江 212000)
0 引言
随着电力电子技术及电机控制理论的不断发展,永磁同步电机(permanent magnet synchronous motors,PMSM)因其高功率和高转矩的优势而广泛应用于电力驱动[1-2]。直接转矩控制(direct torque control,DTC)由于其结构简单、参数依赖性小、动态响应快等优点,被认为是获得永磁同步电机驱动系统高性能运行的最适用技术之一[3]。然而,传统的DTC方法存在切换频率可变、转矩大、磁通脉动等缺点[4-5]。因此,研究如何改善DTC的缺点并利用其优势对于PMSM的进一步推广应用至关重要。
传统的DTC方法通常基于逆变器的开关状态表使用两个磁滞调节器进行控制[6-7]。然而,由于在整个采样周期内选择固定的开关状态所产生的可变开关频率,在转矩和磁通中会产生较大的波动。现有较多学者提出改进技术来克服传统直接转矩控制的缺点。如BERZOY等[8]将基于空间矢量脉宽调制(space vector modulation,SVM)的直接转矩控制(SVM-DTC)技术与PI转矩控制器相结合,降低了转矩和磁链脉动。但在较宽的运行速度范围内固定PI控制器增益,可能导致DTC性能因可变转矩响应而降低。PATURCA等[9]指出自适应PI控制器可用于保持快速转矩响应,并在较宽的运行速度范围内实现较低的转矩和磁通波动。
近年来,有较多研究将预测控制技术用于控制力矩。针对传统直接转矩控制中采用迟滞调制的PI控制器,姬浩然[10]提出了基于SVPWM的模糊逻辑控制器(fuzzy logic controllers,FLC),VAFAIE等[11]提出了无拍直接转矩和磁链控制系统,改善了永磁同步电动机的稳态和瞬态性能。程勇等[12]提出了基于模糊逻辑的自适应直接转矩控制器,以实现恒开关频率下的转矩脉动抑制。凌谢津等[13]提出了一种基于在线整定算法的模糊预测直接转矩控制(fuzzy model predictive direct torque control,FMP-DTC),有效提高了永磁同步电机系统性能。NAIK 等[14]对传统的SVM- DTC和基于自适应模糊逻辑的控制器进行了比较。此外,较多文献指出使用自适应模糊控制器代替传统的具有固定控制器增益的PI控制器可以显著地降低转矩和电流脉动[15-16]。
基于上述研究技术,对基于PI和基于模糊逻辑的直接决策系统进行了比较分析,提出了一种基于级联模糊逻辑的永磁同步电机直接转矩控制策略,实现了参数自适应调节,相比于传统控制,电机转矩和磁链的波动更小,性能更加平稳,更适合大范围调速的场合。
1 PMSM的动态模型
永磁同步电机(PMSM)的数学模型为:
(1)
定子磁链幅值和电磁转矩可分别估计为:
(2)
(3)
式中,φd=Ldid+Kf;φq=Lqiq。
由式(1)~式(3)可得定子磁链和转矩的微分表达式为:
(4)
(5)

2 PMSM的控制系统
首先给出PMSM驱动系统的级联模糊逻辑DTC控制器的框图,如图1所示。
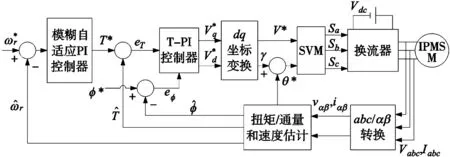
图1 PMSM的直接转矩控制方案框图
该控制方案由电机转速ωr和转矩Te两个级联模糊控制器组成。转速控制器采用模糊自适应-PI控制器,输出力矩命令T*。转矩控制器采用模糊直接转矩控制方法控制电机的转矩和磁链。然后利用d-q变换,得到电压矢量V*,以及电压矢量的角度γ,用于生成空间矢量调制(SVM)模块Sabc的触发信号。最后将触发信号施加到电压源逆变器(VSI)上给永磁同步电机定子绕组施加电压,以获得所需的转速和转矩。
2.1 模糊自适应PI速度控制器
由于在不同工况下电机参数会发生变化,故采用PI控制器参数在线整定。所提的模糊自适应PI速度控制器框图如图2所示。

图2 模糊自适应PI速度控制器框图
图2中,模糊控制器的输入为速度误差和速度误差的变化。而模糊控制器的输出是PI控制器参数ΔKp和ΔKi的期望变化。
该技术的主要目的是改善电机转速在不同工况下的动态和稳态性能。通过调节PI控制器参数Kp和Ki,可以达到所要求的控制特性。为此,设计了模糊逻辑控制器来修改PI控制器的比例和积分参数。
根据图3所示的输入和输出隶属度函数,用仿真实验模糊逻辑工具箱进行模糊推理系统(FIS)建模。Mamdani-Type模糊推理用于指定模糊规则,其中每个if-then规则的输出是一个模糊集。每个子集由{PB,PM,PS,ZE,NS,NM,NB}组成。其中PB、PM、PS分别为正大、正中、正小的缩写;ZE是零(zero)的缩写;NS、NM、NB分别是负小、负中、负大的缩写。

(a) 输入速度变化 (b) 输入速度误差变化
提供所需输出PI控制器参数,给出定义的模糊规则,如表1和表2所示。其中,比例增益和积分增益的模糊推理输出面如图4所示。
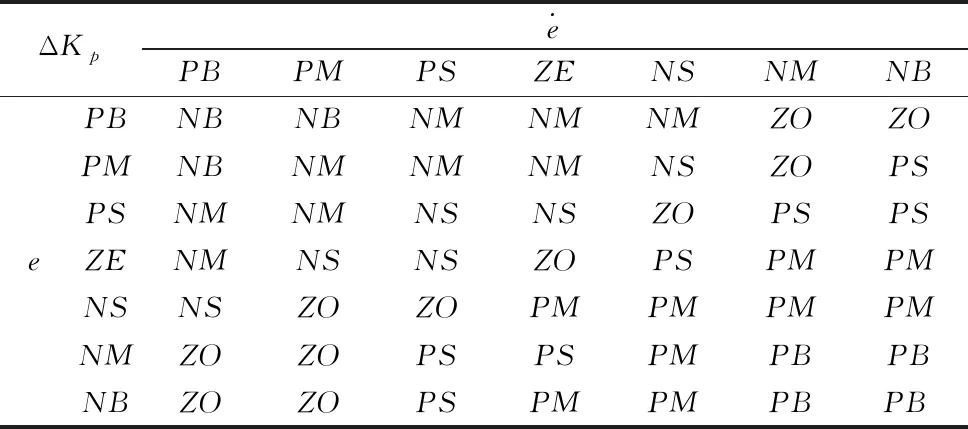
表1 ΔKp的模糊规则库

表2 ΔKi的模糊数据库
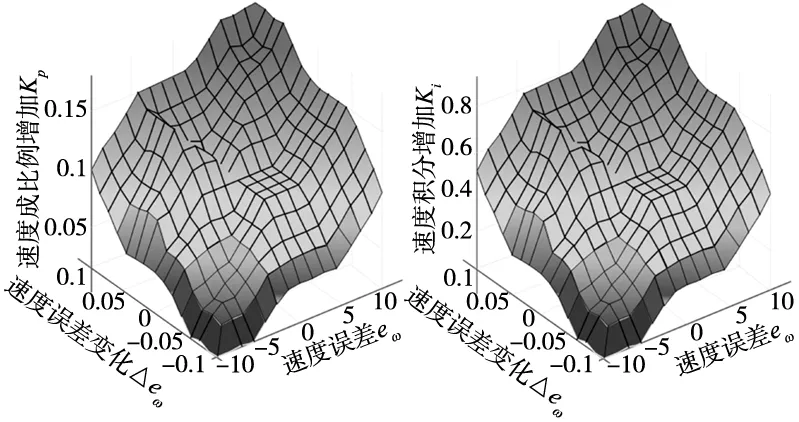
(a) Kp输出曲面(b) Ki输出曲面
2.2 转矩/磁链模糊控制器
基于转矩误差、磁链误差和定子磁链角作为输入,设计了转矩和磁链模糊控制器。而输出为电压矢量。其中共有4个隶属度函数,包括3个输入和1个输出,如图5所示。设计了模糊规则来提供输出电压矢量,如表3所示。此外,当电机转矩没有要求的变化时,选择零电压矢量。

(a) 输入转矩误差 (b) 输入定子磁通误差
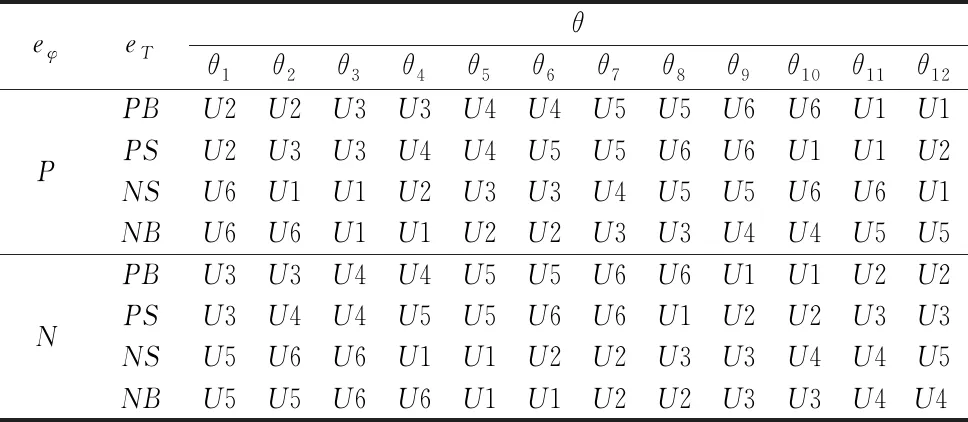
表3 DTC的模糊规则库
3 仿真结果与分析
为验证所提基于级联模糊逻辑的永磁同步电机直接转矩控制策略的有效性,通过搭设仿真系统进行动态模拟实验,其中电机参数如表4所示。
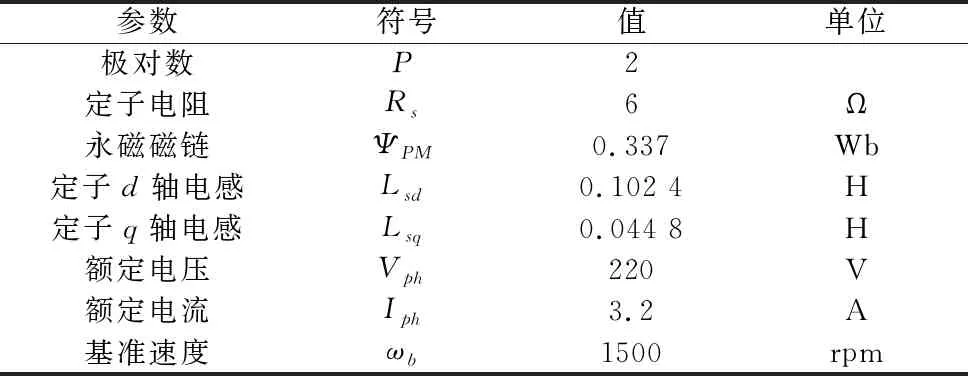
表4 PMSM系统参数
3.1 不同负载条件下所提策略的响应情况
基于所提出的控制方案,给出不同负载条件下电机转矩和转速的变化如图6所示。设置电机在1200 rpm的恒转速下运行,设置在t=2 s时负载转矩由2 N·m变为3 N·m,在t=3 s时定子电阻由6 Ω变为9 Ω。
由图6a可知,在电机转速的微小瞬态变化(少于0.1%)下,电机同样可以成功跟踪所需负载转矩变化。分析图6b可知,所提控制策略下,电机转矩的变化仍有部分纹波。但电机转矩虽然存在纹波,在相同的运行条件下,其纹波大小远小于经典DTC策略得到的转矩。
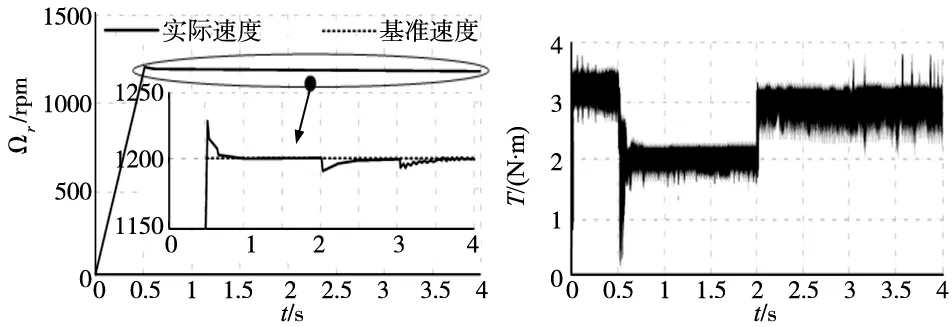
(a) 电机转速 (b) 电磁转矩
图7给出了利用模糊自适应PI控制器在线整定比例增益KP和积分增益Ki的结果,分析可知,Kp和Ki参数改变了传统DTC控制方式,能够实时在线调整。
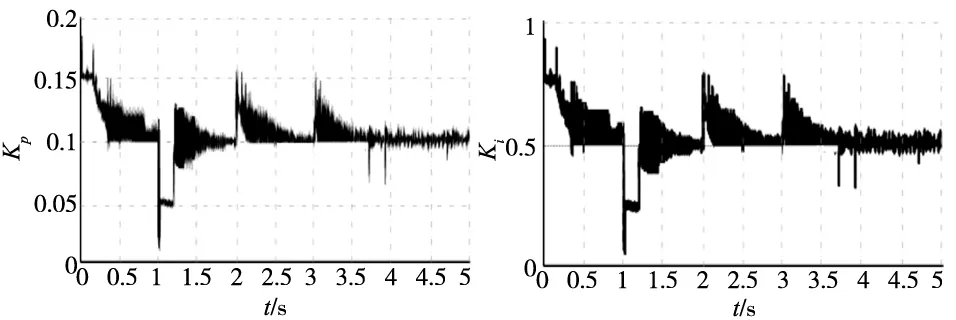
(a) 比例增益 (b) 积分增益
3.2 宽调速范围下所提策略响应情况
为了进一步评估控制系统在宽调速范围内的性能,设置负载转矩在t=1.5 s时从2 N·m变化到3 N·m;电机转速在t=3 s从100 rpm变化到20 rpm,电机转速和电磁转矩变化如图8所示。
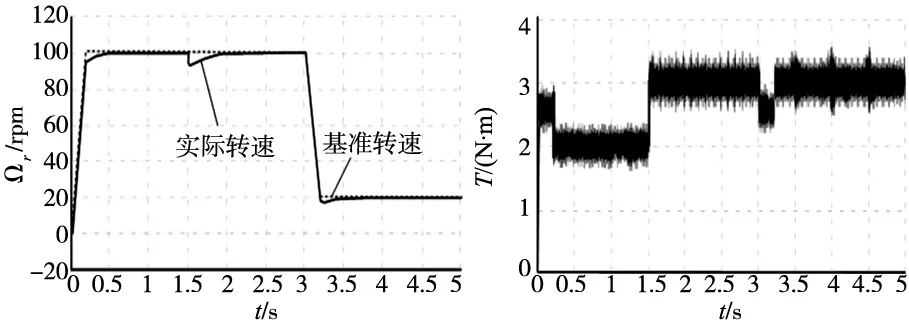
(a) 电机转速 (b) 电磁转矩
可以注意到,电机转速遵循要求的转速指令,转速误差在20 rpm时为0.5%,而电磁转矩在负载变化后,同样能够很快跟随到指定值,在t=3 s时,电机转速骤降,电磁转矩有一个轻微跌落,但在0.2 s内迅速恢复到稳定状态。
图9进一步给出了低速下电机转速和转矩响应。
设置电机转速命令从20 rpm变为0 rpm,在t=1.5 s时负载转矩从2 N·m为3 N·m,即使在低转速下,所提控制策略同样能够识别并跟随参考电机转速的变化。值得注意的是,即使在零转速运行和满载转矩时,实际电机转速也成功地跟踪参考电机转速。
3.3 所提策略不同操作方向上性能评估
为了验证驱动系统在两个操作方向上的性能,采用如图10a所示的速度曲线进行评估。值得注意的是,实际电机速度成功地遵循了预期的速度曲线,速度误差范围如图10b所示。

(a) 电机转速 (b) 转速误差
如图11所示,转矩和电流脉动保持在可接受的范围内。

(a) 电机转矩 (b) 电机电流
此外,自适应控制器增益变化以保持快速转矩响应,如图12所示。

(a) 比例增益 (b) 积分增益
可以推断,系统在两个旋转方向上的性能是可以达到预期的效果的。
4 结论
针对传统DTC控制宽范围调速性能较差的问题,本文提出了一种基于级联模糊控制的永磁同步电机DTC方法,主要结论如下:
(1)级联模糊控制策略采用模糊自适应-PI速度控制器,PI控制器参数可根据工况在线自动调优。
(2)级联模糊控制策略利用模糊直接转矩控制技术实现了大转速范围内的转矩控制。
(3)基于仿真结果验证说明了所提出的级联模糊控制策略可以在变速驱动系统中实现,保持良好的动态和稳态性能。
