宇航团体标准《卫星控制分系统极性测试要求》的研究和实践
2022-11-25谢任远余维吴敬玉史康徐晓雄
谢任远 余维 吴敬玉 史康 徐晓雄
(上海航天控制技术研究所, 上海, 201109)
2011 年以来, 我国的航天事业持续快速发展, 自主创新能力显著增强, 进入空间的能力也大幅提升[1]。 传统的空间应用卫星, 如提供通讯和气象观测的服务继续稳步前进; 同时新兴的空间科学卫星也得到了井喷式发展, 如暗物质卫星“悟空”、 量子科学实验卫星 “墨子号”、 硬 X 射线调制望远镜卫星等空间科学卫星相继发射上天,为我国空间科学探索提供了强有力的工具[2]。
然而在航天事业繁荣的背后, 也出现了不少挫折, 一些卫星由于设计、 制造等环节的极性错误导致整星失效[3]。 日本被寄予厚望、 代表 “新一代 X 射线天文学” 未来的卫星 “瞳”, 于 2016年2 月17 日发射成功, 但一个半月后由于控制分系统出现极性错误, 推力器往相反的方向点火, 导致卫星自身高速旋转直至解体, 损失了2.86 亿美元。 这些挫折也进一步说明, 对卫星控制分系统来说, 极性是特别重要的一环, 是卫星能正常工作的基本要求和必要条件[4]。
由于控制分系统的组成及内外部关联比较复杂, 因此其极性的测试和确认, 一直是包括卫星在内的各类航天器控制分系统研制工作中的重要环节[5]。控制分系统在单机、 分系统、 整星层面极性设计与实现的一致性、 正确性, 事关卫星任务成败。
1 控制分系统的极性
典型航天器控制分系统组成框图如图1 所示。 由图可知其控制分系统由敏感器、 控制器和执行机构3 类产品组成, 具体卫星控制分系统的单机配置根据系统在轨任务特点和技术指标要求确定。
极性的定义指的是: 产品特定的安装方向、连接对应关系、 介质流向关系、 运动方向关系等。 控制分系统的极性包括: 产品特定的坐标系对应关系、 运动类产品指定的运动方向关系、 敏感器测量与输出的对应关系、 软件计算要求与实际数据输出的对应关系等。
2 极性测试要求的技术内容
卫星控制分系统极性测试涵盖了各产品在各研制阶段的极性测试内容, 具体内容包含了整个研制周期中的单机级、 分系统级、 整星级极性测试及发射场极性确认工作, 并体现了不同研制阶段测试的区别。 根据卫星控制分系统的工作原理、 研制流程及设计要求, 分解出极性测试和确认的项目以及相应的测试方法。
2.1 单机级极性测试
在控制分系统产品验收时, 对单机自身的极性进行测试, 一般使用目标模拟器和运动模拟器等专用模拟器对单机进行测试, 验证有极性单机的极性是否与任务书、 技术要求等输入文件的规定一致。
根据常规卫星控制分系统的构成, 该类测试应包含星敏感器、 地球敏感器、 数字式太阳敏感器、 0-1 式太阳敏感器、 模拟式太阳敏感器、 惯性器件、 磁强计、 飞轮、 磁力矩器等控制分系统部组件极性测试的内容、 方法、 所用仪器设备及确认要求 (表格)。
2.2 控制分系统级单机极性测试
各部组件通过电气连接电缆、 分系统软件等连接成控制分系统后, 按分系统进行开闭环测试前, 在分系统级仿真试验环境下开展系统级下的单机极性测试, 包括各单机与系统控制器之间的极性接口检查, 一般使用目标模拟器和运动模拟器等专用模拟器对单机进行测试, 验证单机与系统之间极性信息是否一致、 正确。
根据各部组件在控制分系统内的工作方式及分系统测试环境, 该类测试应包含星敏感器、 地球敏感器、 数字式太阳敏感器、 0-1 式太阳敏感器、 模拟式太阳敏感器、 惯性器件、 磁强计、 飞轮、 磁力矩器等部组件在分系统条件下的极性测试的内容、 方法、 所用仪器设备、 用例、 数据记录及极性确认要求 (表格)。
2.3 控制分系统极性测试
控制分系统极性测试是在各单机部件与测试设备一起连成分系统后, 在姿态角、 角速度、 状态等控制输入人为设置偏差的情况下将闭环状态在动力学模型执行机构输入位置断开, 进行分系统的开环特性测试, 验证控制分系统在给定的输入下, 解算输出的极性正确性和相关执行机构动作的正确性。
分系统极性测试一般包括的内容: 分系统各工作模式中姿态角、 角速度正负偏差下的飞轮、磁力矩器、 推力器极性测试; 飞轮的推力器、 磁力矩器卸载极性测试; 太阳电池阵的驱动极性测试; 安全模式下对日定向控制的极性测试等。 并对极性确认要求进行表格化说明。
2.4 控制分系统整星极性测试
在控制分系统整星极性测试前, 控制分系统各单机, 根据设计要求通过安装面、 支架等固连于星体舱内或舱外, 除安装精度外, 安装极性、电缆连接关系也必须经过确认。 安装正确、 连接正确是分系统单机实现控制算法的基础保障。
按照控制分系统极性规定, 控制分系统各单机装星后, 与卫星其他分系统协调工作时, 使用目标模拟器、 整星运动等方式对控制分系统及其单机进行极性测试, 验证单机与分系统之间极性信息是否一致、 正确。 测试的内容主要包括对控制分系统执行机构、 太阳阵驱动机构、 推进分系统在整星条件下进行极性的测试。
2.5 控制分系统发射场整星极性测试
卫星运往发射场时, 一些部组件需要拆卸后单独运输, 发射场极性测试主要针对单独运输后在发射场安装、 连接的部组件以及有插拔电缆过程的单机开展, 其他单机极性测试可结合光路测试和功能测试进行。 一般使用目标模拟器等专用模拟器对单机进行极性测试, 再次验证重新装星后部组件与控制分系统之间极性信息是否一致、正确。 用多媒体记录的方式, 测试确认各单机在整星坐标系中的安装极性与规定要求的一致、正确。
3 极性测试要求的实践
按照前文所述的控制分系统极性测试分类及方法, 在某型号卫星的研制中进行了实践应用。
3.1 单机级极性测试
a) 0-1 式太阳敏感器单机级极性测试
0-1 式太阳敏感器 (简称 “LSS”) 一般具有 3个正交方向的电池片 (LSSX、 LSSY、 LSSZ), 运用太阳电池片将光信号转换成电信号这一基本原理, 制作成为卫星测量产品。 该产品在单机级极性测试时, 通过手持式光源照射不同的电池片,产生电信号, 采集设备将电流输出至不同通道,确认其极性的正确性。 极性测试表格见表1。
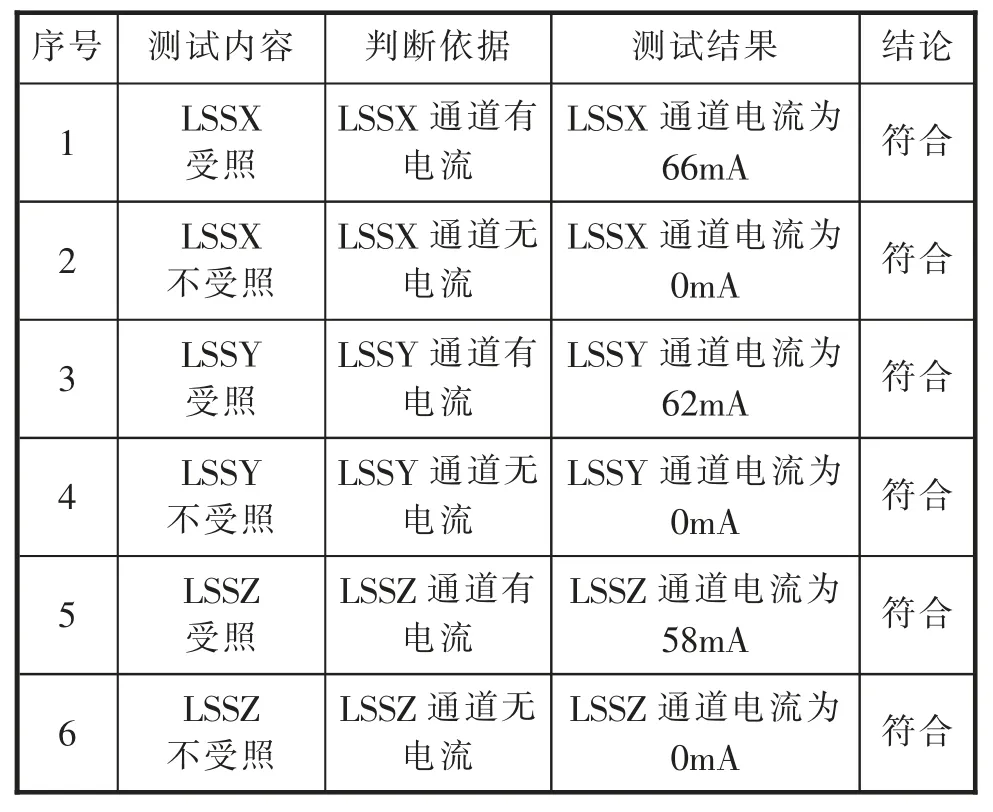
表1 0-1 式太阳敏感器单机级极性测试表
b) 反作用飞轮单机级极性测试
反作用飞轮是卫星姿态执行机构的重要器件, 它接收星载计算机的控制指令, 通过驱动电机对飞轮轮体加、 减速产生反作用力矩, 与卫星本体进行动量交换, 从而达到控制卫星姿态的目的。 该产品在单机级极性测试时, 将其安装在专用工装上, 通过地测设备发送正/负向转速指令,观察并使用多媒体设备记录其转动方向, 确认其极性的正确性。 极性测试表格见表2。
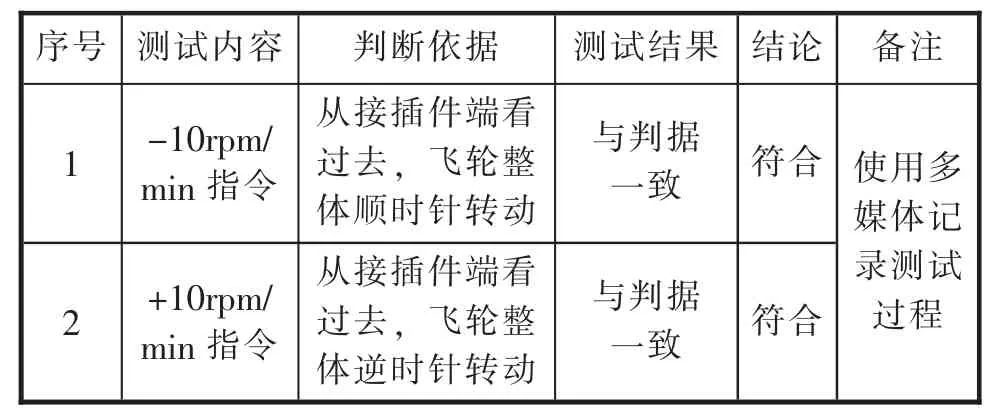
表2 反作用飞轮单机级极性测试表
3.2 控制分系统级单机极性测试
a) 光纤陀螺组合控制分系统级极性测试
光纤陀螺组合是卫星姿轨控分系统的重要敏感器件, 用于敏感卫星星体的惯性角速度, 输出其在星体坐标系上的分量, 为卫星各个工作模式和飞行阶段提供连续的三轴惯性角速度信息。 该产品在控制分系统级极性测试时, 将其接入系统后放置在试验台上, 通过转动光纤陀螺组合的X、 Y、 Z 轴, 观察并记录控制分系统星载计算机采集到的角速度大小及方向, 确认其极性的正确性。 极性测试表格见表3。
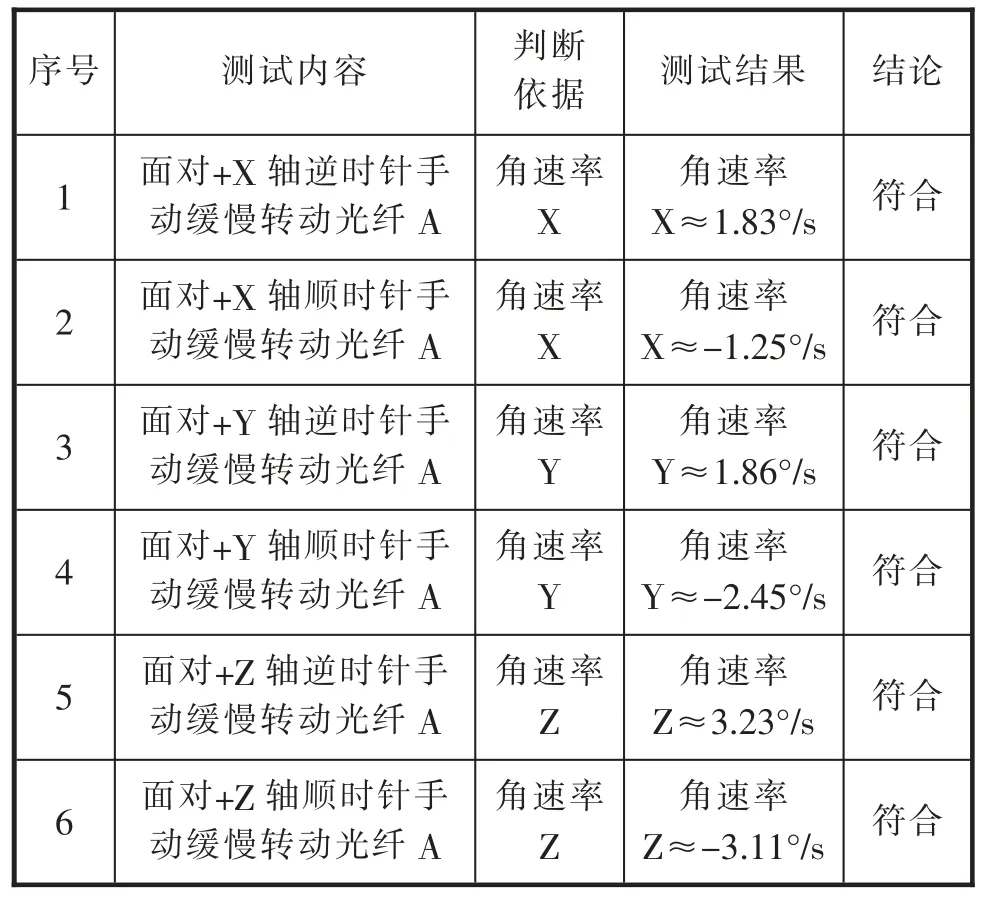
表3 光纤陀螺组合控制分系级极性测试表
b) 磁力矩器控制分系统级极性测试
磁力矩器是控制分系统的一种执行机构, 用磁力矩器的磁矩与磁场作用产生力矩, 以补偿航天器上的残余磁场或由小干扰力矩引起的姿态漂移, 或对动量交换系统进行卸载。 该产品在控制分系统级极性测试时, 将其接入系统后放置在试验台上, 通过星载计算机向其注入磁控电流, 使用指北针确认产生的磁场方向, 确认其极性的正确性。 极性测试表格见表4。
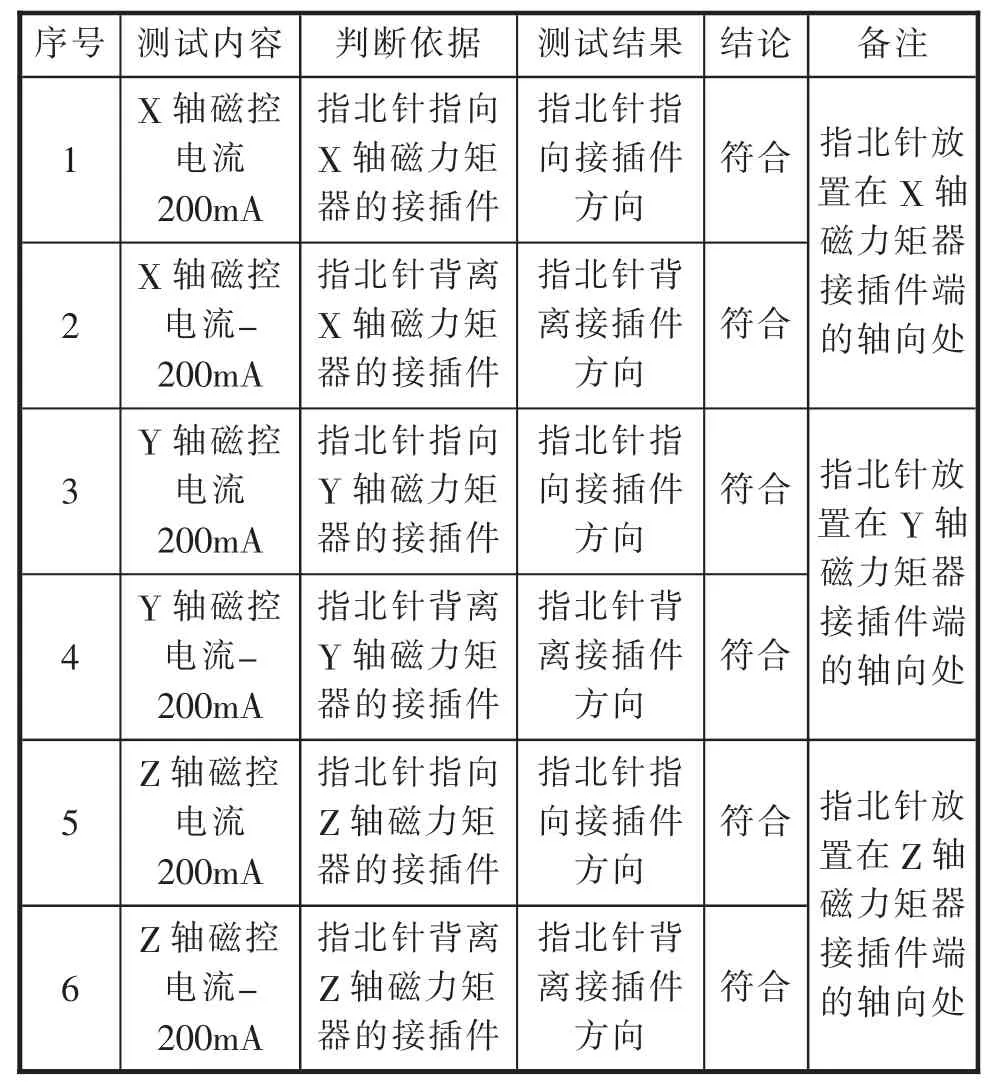
表4 磁力矩器控制分系级极性测试表
3.3 控制分系统极性测试
a) 角速度偏差下的控制分系统极性测试
在角速度偏差下的控制分系统极性测试时, 输入点为角速度敏感器的角速度偏差量, 输出检测点为执行机构的输出方向。 以某卫星使用推力器作为执行机构进行速率阻尼极性测试为例, 当初始输入角速度大于系统控制目标值时, 推力器输出本体系下负力矩; 反之, 当初始输入角速度小于控制目标值时, 推力器输出本体系下正力矩。 通过观察记录角速度偏差设置与推力器输出对应关系, 考核姿轨控软件的控制极性。 极性测试表格见表5。
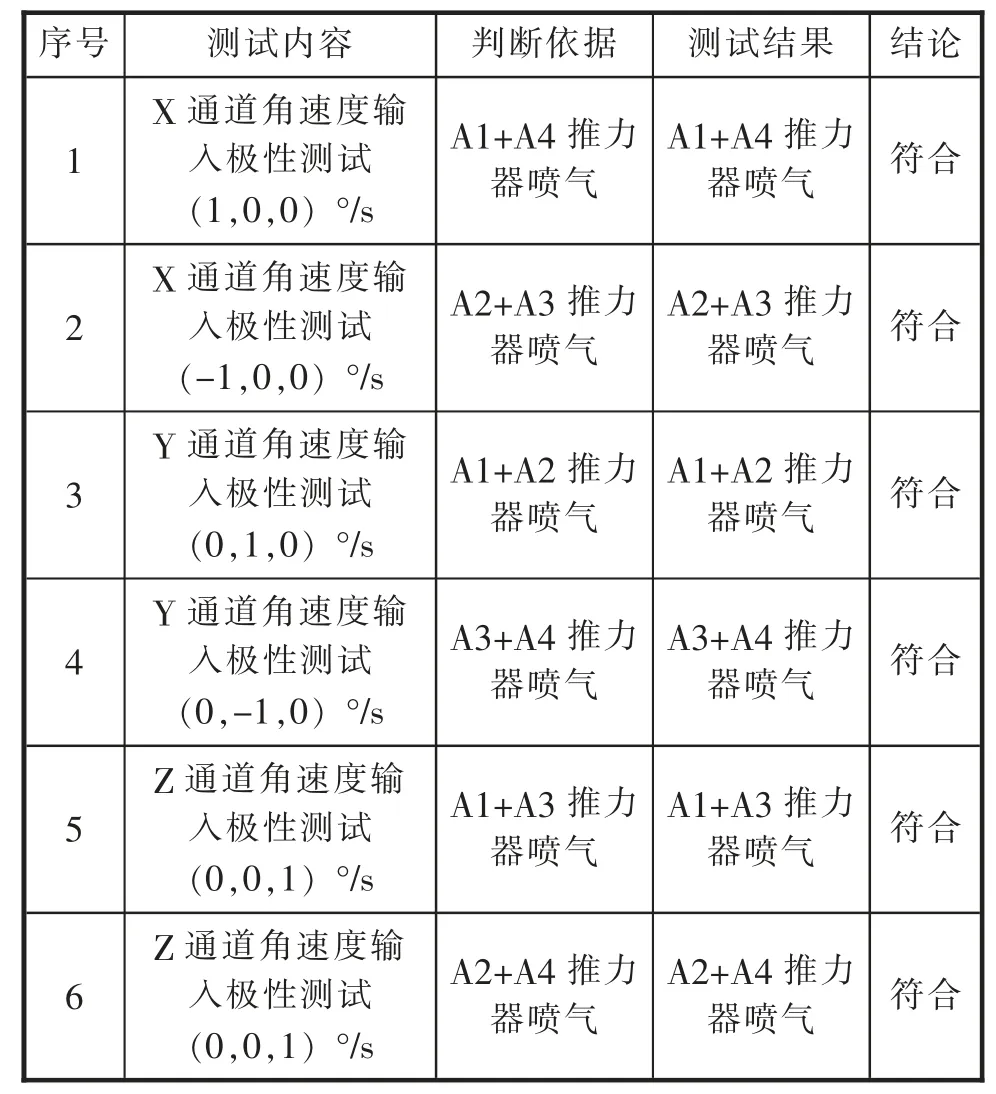
表5 角速度偏差下的控制分系统极性测试表
b) 角度偏差下的控制分系统极性测试
在角度偏差下的控制分系统极性测试时, 在各轴向上输入正向或反向角度偏差量, 观察并记录对应通道上飞轮的输出结果。 以某卫星使用反作用飞轮作为执行机构进行对日定向机动极性测试为例, 当初始输入角度相对于系统控制目标值有正向偏差时, 反作用飞轮输出本体系下负向力矩; 反之, 当初始输入角度相对于系统控制目标值有负向偏差时, 反作用飞轮输出本体系下正向力矩。 通过观察记录角度偏差设置与反作用飞轮输出对应关系, 考核姿轨控软件的控制极性。 极性测试表格见表6。

表6 角度偏差下的控制分系统极性测试表
3.4 控制分系统整星极性测试
a) 磁强计整星级极性测试
磁强计是卫星姿轨控系统磁力控制模式中的地磁测量敏感部件, 用于地球磁场强度矢量的在轨测量, 其测量结果送星载计算机, 以保证磁力矩器控制力矩的正确产生。 该产品在整星级极性测试时, 将其按照设计的位置和方向安装在卫星本体上, 使用磁块N 级和S 级分别作为磁强计头部的敏感对象, 通过星载计算机采集到的磁场强度和理论磁场强度的方向和大小相比, 确认其极性的正确性。 极性测试表格见表7。
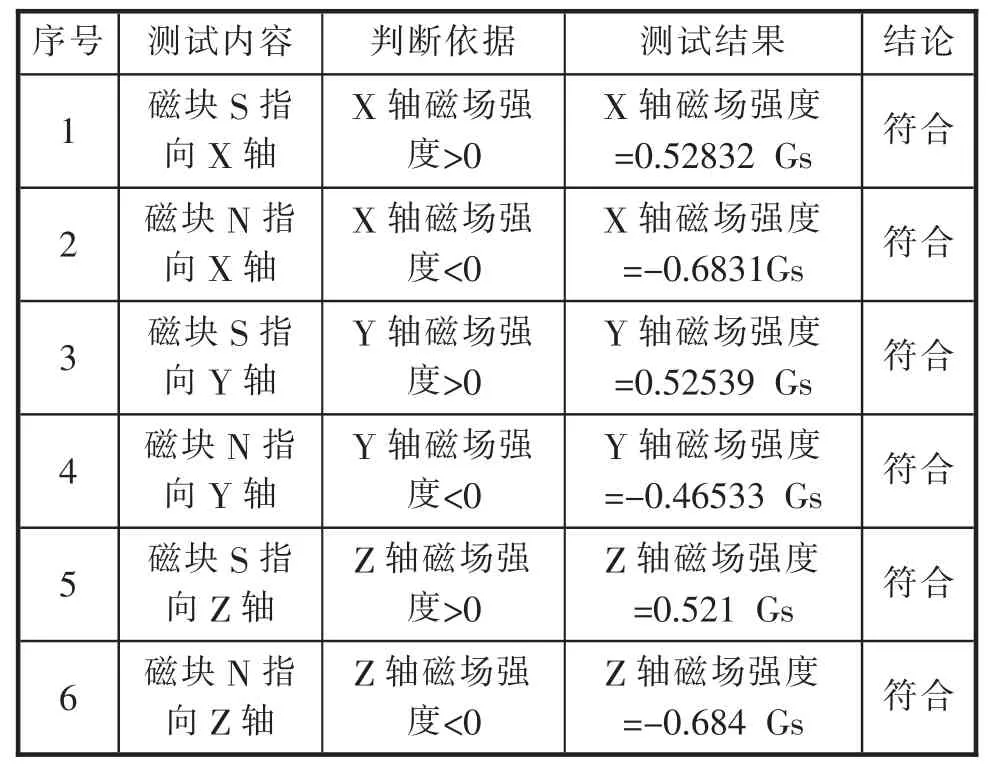
表7 磁强计整星级极性测试表
b) 与推进分系统接口整星级极性测试
推进分系统作为姿轨控分系统姿态、 轨道控制的主要执行机构, 在整星级状态下与姿轨控分系统之间进行极性测试, 确认其与姿轨控系统间极性设计、 实现的正确性, 显得至关重要。 以某卫星进行姿轨控分系统与推进分系统整星级极性测试为例,通过姿轨控星载计算机发送指令, 控制推进分系统推力器喷出一定时长的气体, 用套在相应推力器上的气球有无明显鼓起进行测试可视化, 并同时使用多媒体工具进行记录。 极性测试表格见表8。
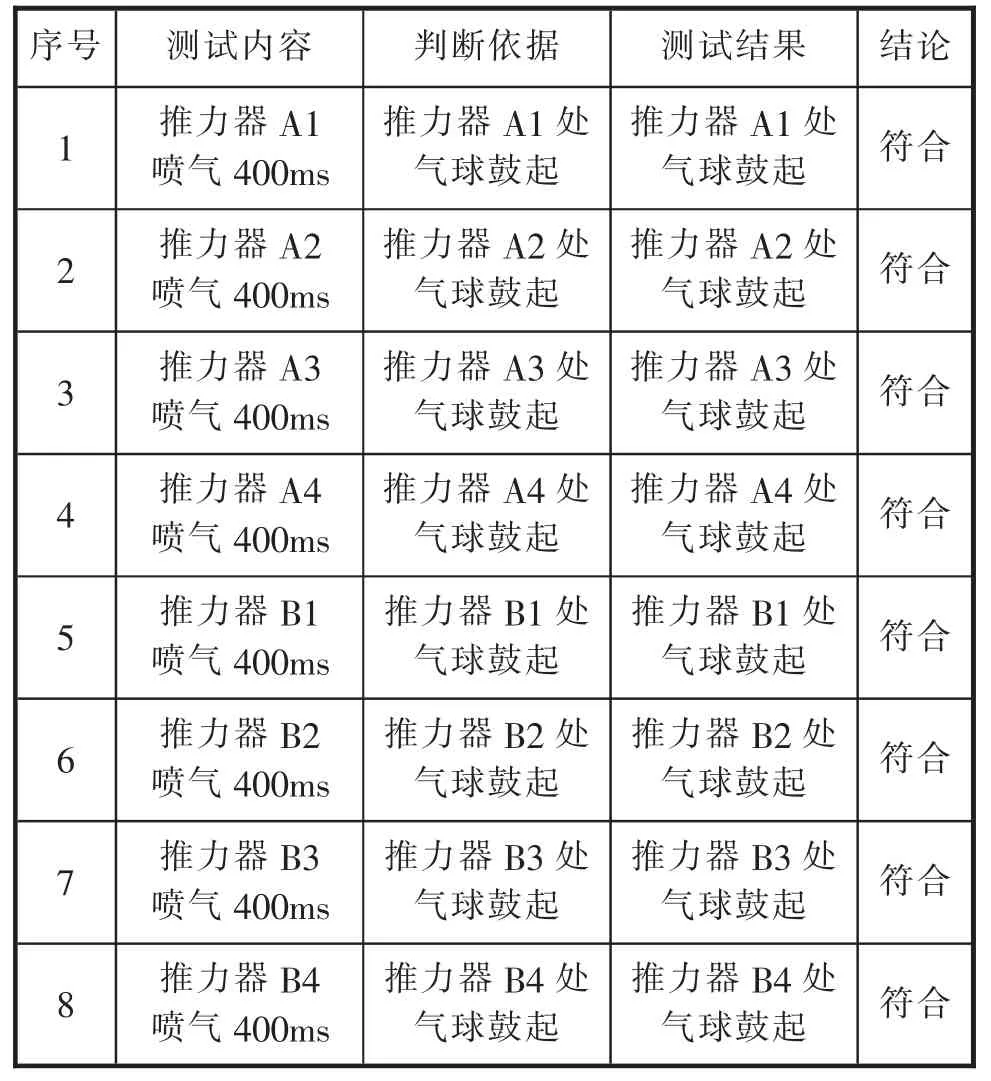
表8 与推进分系统接口整星级极性测试表
3.5 控制分系统发射场整星极性测试
a) 安装极性测试
卫星在发射场的控制系统极性测试为最后一次极性测试, 因此主要测试项目为对经过单独拆装运输的单机进行极性测试, 测试方法一般同控制系统整星级测试。 产品在重新装星后进行电测试之前, 会首先确认各单机在整星坐标系中的安装极性与规定要求的一致、 正确, 并使用多媒体进行记录。 安装确认表格示例见表9。

表9 星敏感器控制分系级极性安装确认表
b) 光路极性测试
数字式太阳敏感器是通过计算太阳光线在探测器上相对中心的位置的偏差来计算太阳光角度的敏感器, 因为产品进行了长距离的运输, 在发射场还需测试产品光路的极性。 将其按照设计位置和方向接入卫星本体上后, 使用强光太阳灯照射数字式太阳敏感器, 通过星载计算机采集到的光斑坐标与已知判据相比, 确认其极性的正确性。 极性测试表格见表10。

表10 数字式太阳敏感器发射场极性测试表
综上所述, 某型号使用宇航团体标准 《卫星控制分系统极性测试要求》 中规定的控制分系统测试的流程和方法, 在控制分系统研制过程中通过逐步极性测试, 避免了系统测试中可能出现的极性错误、 极性负负得正的情况, 充分考核验证了控制分系统研制流程中各层级极性的正确性。
4 结论
控制分系统对测量部件和执行机构等单机的极性、 安装方位、 计算使用方法都有一定的要求。 在单机研制至发射场工作的整个控制分系统研制过程中, 唯有对控制分系统进行极性测试及确认, 保证控制分系统极性的正确性, 才能保证卫星在轨发射后控制分系统的正常工作, 避免系统失控导致任务的失败。 本文对卫星控制分系统极性测试按照研制流程进行了测试阶段和项目分解, 并通过在某卫星研制过程中进行实践应用, 列举了每阶段个别单机极性测试内容和方法, 充分验证了控制分系统在单机、 分系统、 整星、 发射场层面极性设计与实现的一致性、 正确性, 确保了控制分系统极性的正确性, 对整星任务成功提供有力支撑, 也验证了本文对控制分系统极性测试各阶段任务分解的可行性和正确性, 可进一步在其他卫星型号研制过程的控制分系统极性测试中应用推广。
