舰船协同攻击水下目标的误差建模与分析
2022-11-24胡鹏涛
胡鹏涛,杨 博,陈 凯
(中国人民解放军第91388部队,广东 湛江 524022)
0 引言
随着声隐身技术的发展[1-3],水下目标的航行噪声水平逐年降低,已接近海洋环境噪声,低噪声技术的进步大大降低了水下目标被扑捉的概率,致使对目标探测[4-6]的方式通常采用多平台[7]、多基地[8-9]、多型传感器[10-12]等。然而,水面舰船编队在复杂的海洋环境条件下协同对抗水下目标的实际过程中,由于舰船利用外部信息进行本舰的目标方位解算时会产生偏差,导致不同的对抗态势往往会影响舰船对水下目标实施鱼雷攻击的效果。文献[13]以水面舰与舰载直升机协同反潜的作战过程为研究对象,采用蒙特卡罗法对影响直升机引导水面舰艇鱼雷攻击效果的主要误差源,例如直升机和攻击水面舰艇位置误差、占位航向与航速误差、探测距离和方向误差等进行了分析;文献[14]研究了协同制导试验中4种典型航路下测控设备由坐标转换造成的传递误差,建立了一种不需要转化为大地直角坐标的传递误差计算方法和转化模型;文献[15]基于数据链协同定位原理,研究了无人艇协同定位误差的种类、特点和影响,并针对源节点位置精度、几何精度因子和伪测距精度3个影响因素进行了仿真和分析;文献[16]从提高多舰艇协同导航测距精度的角度出发,研究了声速、时钟同步和时间延迟等因素对协同导航定位精度的影响;文献[17]设计了基于因子图与最大相关熵的协同定位算法,通过误差参数辨识算法提高水下航行器的定位精度。
本文针对水面舰编队对水下目标进行探测与攻击的典型应用场景,通过分析水面舰船编队推送目指的全链路,建立舰船利用数据链[18-19]获取外部信息后协同对水下目标攻击的误差函数模型,并通过算例仿真计算目标位置的解算误差及影响因素的贡献比,旨在实战化训练时提高武器装备攻击的成功率。
1 舰船对抗的仿真场景
水面舰船编队对抗水下目标的态势如图1所示,图中B舰和水下目标M分别由T0时刻运动至T4时刻,B舰执行航向270°,航速10节,水下目标M航行深度为60 m,T0时刻,B舰利用主动声纳探测时发现目标M,并将目标M的位置信息通过数据链实时推送给A舰,A舰接收到目指后调整本舰航向,加速驶向目标,准备迎向攻击,并于T4时刻为本舰右舷发射鱼雷,此时A舰与目标M的迎向夹角为50°,其航行轨迹如图1所示。T0~T4期间,A舰信息系统将B舰预报的目标M位置进行本舰的方位和距离解算,T3为实施攻击前B舰声纳最后更新目标M位置的时刻,T2为声纳在T3时刻的上一个扫描周期所对应时刻。
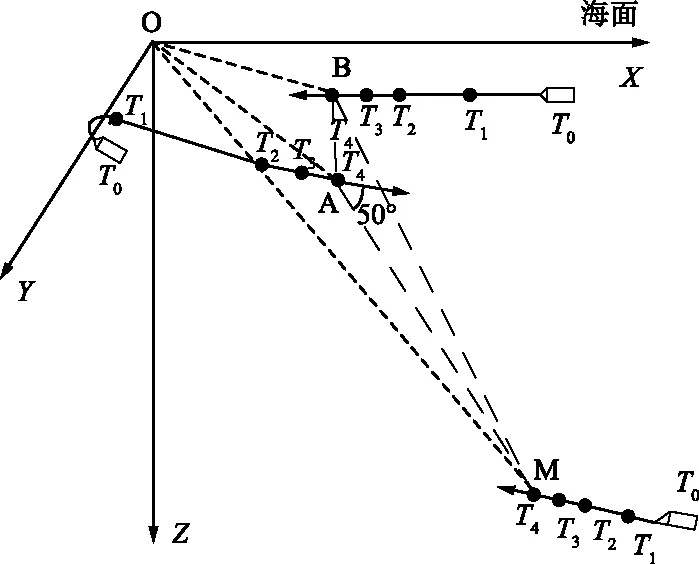
图1 海上典型应用场景态势图
2 目标位置误差的数学模型
水面舰船通过编队获取水下目标位置的整个数据流程如图2所示。

图2 A舰接收目标信息的数据流程

(1)

dξ(ζ,δB,ε)|QM=ξ′ζ|QM·dζ+ξ′δB|QM·dδB+ξ′ε|QM·dε,
(2)
dζ(ξQB·A,δA)|QM=ζ′ξQB·A|QM·dξQB·A+ζ′δA|QM·dδA=
F:dζQB(ξ)|QM→dζQA(ξ)|QM+
ζ′δA|QM·dδA,
(3)
dζ(ξQB·A,δA)|QM=F:(ξ′ζ|QM·dζ+ξ′δB|QM·dδB+
ξ′ε|QM·dε)QB→(ζ′ξξ′ζ|QM·dζ+
ζ′ξξ′δB|QM·dδB+
ζ′ξξ′ε|QM·dε)QA+ζ′δA|QM·dδA。
(4)
3 目标位置误差的仿真计算
仿真算例:海深100 m,海区声速梯度图如图3所示,其中0~30 m为弱负梯度,30~60 m为强负梯度,60~100 m为弱负梯度,以B舰为观察点的初始态势如表1所示,T2时刻B舰声纳探测目标M的方位和距离误差为1.4°,0.3 km,T3时刻B舰声纳探测目标M的方位、距离误差为1.5°,0.3 km,T2~T4时刻B舰、A舰的信息系统解算目标M的方位误差分别为3.8°,2.5°,T3时刻后以4 s为间隔,水面舰船与目标M的方位信息随时间变化如表2所示,其中γ为目标M位A舰的方位,β为目标M位B舰的方位,α为A舰位B舰的方位。

表1 水面舰船与目标的态势信息
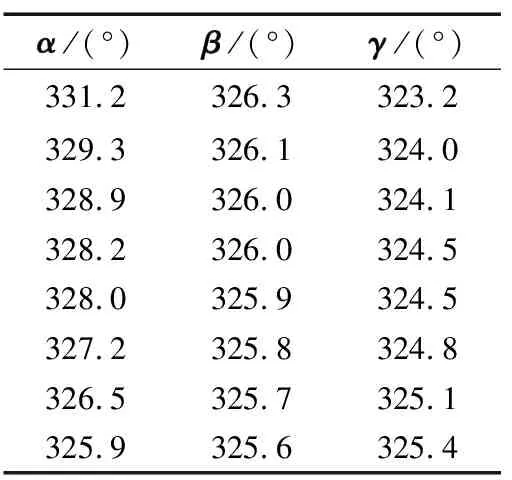
表2 T3时刻后的方位信息

图3 海区声速梯度图
针对误差函数模型中声纳探测精度因子ζ,水面舰船信息系统解算精度因子δA,δB和声纳扫描周期内解算的精度因子ε等影响因素,以下分析其引入目标的方位和距离误差。
3.1 编队声纳探测引入的误差
根据表1的态势信息,水面舰船编队和水下目标M的相对位置如图4所示。

图4 舰船的空间位置


表3 声纳探测引入的误差
比较表1和表3可以看出,尽管T3时刻本船声纳探测的方位误差仅1.5°,但映射至A舰位置时,B舰声纳探测引入的误差为2.65°,即当前态势条件下,A舰攻击时方位误差已扩大了近一倍。
3.2 编队信息系统解算引入的误差
由于声纳探测目标的航速、航向等存在一定偏差,导致水面舰船信息系统融合解算目标位置时也存在误差。根据图4中双方的空间位置,结合表1的态势信息,利用式(4)将编队B舰信息系统解算目标M的位置映射至A舰处,则B舰信息系统解算引入的误差如表4所示。
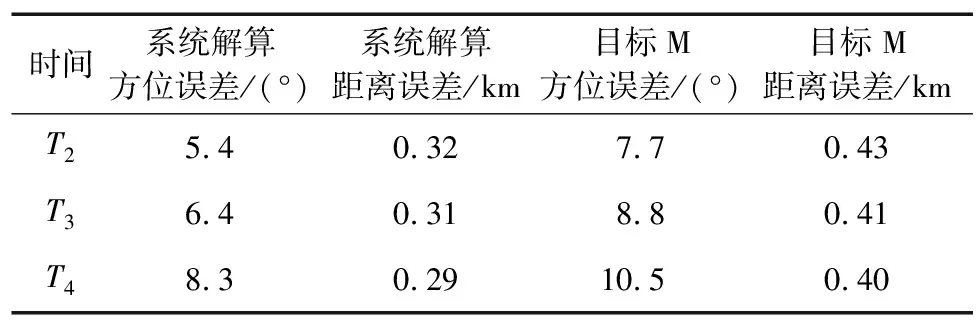
表4 B舰信息系统解算引入的误差
比较表1、表3和表4中目标M的实际位置,可以看出:
① B舰信息系统解算目标M的方位误差为3.8°,但T2和T3时刻映射至攻击舰A位置处的方位误差已扩大至5.4°和6.4°。
② 考虑B舰声纳探测误差叠加信息系统解算误差,T2和T3时刻目标M位B舰的方位误差分别为1.4°+3.8°=5.2°和3.8°+1.5°=5.3°,映射至A舰位置处的方位误差扩大至7.7°和8.8°。
③T4时刻,B舰声纳探测目标M位本舰的方位误差仅为1.5°,但叠加本舰信息系统解算误差后映射至A舰位置处的方位误差已达10.5°。
3.3 声纳扫描周期引入的误差
主动声纳更新目标位置存在一定的扫描周期,扫描周期内本舰信息系统融合声纳上个周期的探测结果和当前态势进行实时解算,因此声纳扫描周期内解算目标位置会存在误差。根据表2中声纳扫描周期内目标M的方位信息变化,实施攻击前水面舰船与目标M的态势如图5所示。

图5 实施攻击前的态势图
利用表1、表2和表4,结合式(2)和式(4),声纳扫描周期引入的方位误差随周期时长变化如图6所示。图6中,ΔθB表示以B舰为观察点的方位解算误差,ΔθA表示映射至A舰处的方位解算误差。

图6 声纳扫描周期引入的方位误差
28 s时间长度引入的方位解算误差为5.8°-5.3°=0.5°,当映射至A舰后方位误差扩大至10.5°-8.8°=1.7°。因此,主动声纳扫描周期引入的误差大小与周期时长、各兵力运动态势均有关。
3.4 本舰信息系统解算引入的误差
根据数据传输流程,目标M的位置信息由B舰经数据链推送至A舰,再由A舰信息系统融合解算后得到目标M的实时方位和距离。由于A舰作为攻击方,其信息系统解算后的方位和距离信息无需进行空间映射,因此A舰信息系统解算引入的攻击方位误差即为2.5°,而综合以上各个因素的影响,水面舰对水下目标实施攻击时总方位误差达10.5°+2.5°=13°。
4 影响因素的贡献比
针对上节的误差分析,当前态势水文条件下,A舰实施攻击时刻各因素引入方位误差的百分比如图7(a)所示,各因素对A舰攻击方位偏差的贡献比如图7(b)所示。

(a)误差的百分比
比较图7(a)和图7(b)可知,尽管编队声纳探测误差明显小于攻击舰A的信息系统解算误差,但在当前态势下其对鱼雷攻击影响的贡献比显著提高,原因分析如下:
① A舰和目标M之间的距离变小,同时二者接近相向运动,导致二者间的方位变化率加快;
② A舰、B舰之间距离和A舰、目标M之间距离的比值,其变化率逐渐增大,导致对B舰预报目标位置的精度要求逐渐提高,即此态势条件下编队推送目指的精度将较大程度影响攻击舰的攻击效果。
5 结束语
针对编队引导水面舰船实施攻击水下目标的场景,建立了水面舰船协同攻击目标的误差函数模型,并分析了诸因素影响鱼雷攻击的误差大小和贡献比。结果表明:
① 在对抗态势的策略上,应避免出现攻击舰与水下目标间的大方位变化率,同时避免攻击舰、编队间距离与攻击舰、目标间距离比的变化率增加;
② 编队解算目标位置时,需开展多路信息融合求得准确的目标航速、航向等信息,才能避免其解算误差随时间累积,以及目标位置映射变换过程中进一步放大舰船信息系统解算、声纳扫面周期等因素引入的误差;
③ 在恶劣水文条件下,由于鱼雷自导作用距离下降,若目标方位的解算精度低以及鱼雷航行深度与水下目标处于不同温跃层,将容易导致鱼雷搜索时难以发现水下目标。
