科研资讯
2022-11-24
国产FORBID荧光光电微生物检测仪问世
海南大学南海海洋资源利用国家重点实验室万逸研究员带领的海洋微生物传感团队研究设计了一款FORBID荧光光电微生物检测仪,其病原微生物检测方法能够与传统国标方法媲美,微生物在1 cfu/mL浓度的精确度可以达到90%,极大限度地降低操作复杂度,同时节约近60%人工成本。对于病原微生物的检测,它可根据检测量自由组合通道数,最多可同时得到256个结果,工作效率走在国际前沿。
为了突破病原微生物快速检测的技术瓶颈,研究团队自主创新了多项关键技术,阐明CRISPR-Cas酶快速病原诊断的新型传感机制、酶底物病原诊断在水质微生物快速诊断中应用机制,成功开发不同微生物生长的最适培养基,对病原微生物快速检测方面如虎添翼。
FORBID荧光光电微生物检测仪的出现打破了微生物诊断仪的商品化和实验室中微生物检测技术存在技术转化壁垒,并且很好地解决当前国际上微生物商业检测技术和工具存在的体积比较大、无法便携式携带以及复杂的分析测量操作等痛点问题。
该FORBID荧光光电微生物检测仪结合实验室优化的检测方法,以海洋病原微生物为靶标,通过实现海洋微生物快速检测为目的,将生物分析、微电子、结构电子工程等多学科深度交叉融合,开创性地解决了一系列有关海洋微生物快速检测相关难题,实现了从“理论”到“实践”、从“普遍性”到“特异性”、从“间接”到“直接”、从“多步”到“一步”的跨越。相关成果发表在《化学综述》上。
德国科学家开发用于高分辨率热映射的印刷式温度传感器阵列
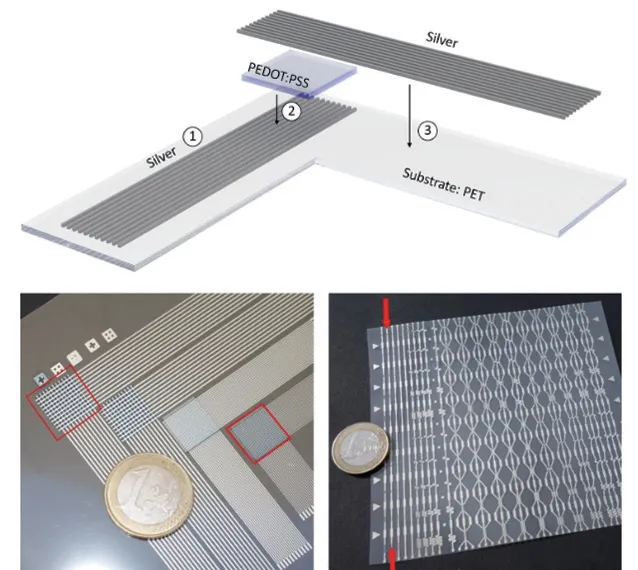
德国卡尔斯鲁厄理工学院(Karlsruhe Institute of Technology)和斯图加特大学(University of Stuttgart)的研究人员开发出一款无源温度传感器阵列。这款传感器阵列由两个独立的银电极组成,它们夹在一层由聚(3,4-乙烯二氧噻吩)-聚苯乙烯磺酸盐(PEDOT:PSS)组成的传感材料中。这为空间温度读数带来了相当高的传感器密度,同时还保持了较小的阵列尺寸。2022年8月20日,这项研究发表在Scientific Reports上。
这款无源温度传感器阵列有效解决了温度传感广泛应用的主要障碍,并且,为实现对传感器数据快速准确的解释,经过训练的神经网络(NN)被用于温度预测,成功地解决了相邻传感器像素之间的潜在串扰问题。研究人员使用特殊印刷的银质微加热器结构研究空间温度分辨率,最终达到1.22 ℃的相当高的空间温度预测精度。
研究人员提出了一款基于传感器材料PEDOT:PSS的新型全丝网印刷式无源温度传感器阵列。后者嵌入在两个银电极之间。这款温度传感器阵列的“三明治”设计实现了高传感器密度——1平方厘米面积集成100个传感器像素。这款温度传感器阵列在20 ℃至90 ℃之间能成功且可靠地运行。两种特性的结合使这款温度传感器阵列具有非常诱人的前景,不仅适用于医疗保健应用、机器人技术和电子皮肤,还适用于电子设备和集成电路(IC),尤其是处理器芯片的温度监测。这款温度传感器阵列印刷在100 μm厚的柔性聚对苯二甲酸乙二醇酯(PET)衬底上,使其适用于不同的用例和不同形状的表面,即按照人体指尖的曲率,提供类似于人体手指弯曲的灵活性。
新加坡科学家开发新型防跌倒机器人
新加坡南洋理工大学(NTU)和陈笃生医院的科学家们开发了一种移动机器人平衡助手MRBA(Mister Bah),它可以对老年人跌倒作出预判,并在老年人倒地之前“扶住”他们。MRBA由一个有轮子的电池供电的底座组成,该底座连接到佩戴在用户臀部周围的软垫背带上。
当用户在家里或其他环境中散步时,MRBA机器人会跟在他们后面。利用深度感应相机和其他传感器,机器人能够检测到表明用户突然失去平衡的提示性动作,进而做出反应,停止并将安全带固定在原地,使佩戴者不至于摔倒。

该机器人还能识别故意的动作,如与坐下、起身和站立有关的动作。在所有情况下,它都会提供相应的协助。除了在用户的日常生活中提供帮助外,该机器人还可用于康复医学,在佩戴者学习重新行走时将他们扶起来。在测试中,29名患有中风、脑外伤和脊髓损伤的志愿者在3天时间内使用了MRBA。事实证明,该设备对日常活动很有帮助,在整个测试期间,没有任何参与者有跌倒的记录。
科研团队希望该技术在明年实现商业化。
中国科大实现皮特斯拉级NV色心量子传感器
中国科学技术大学中科院微观磁共振重点实验室杜江峰、石发展、孔飞等人基于NV色心量子传感器实现了皮特斯拉(pT)水平的高灵敏微波磁场测量,相比此前该体系实现的亚微特斯拉指标水平,测量灵敏度提升了近十万倍。2022年8月10日,相关成果以“带有金刚石传感器的微波场皮特斯拉磁力测量”为题,发表在《科学进展》期刊上。
此次实验中,团队提出了“连续外差探测方法”,通过引入适度的和略微失谐的参考微波来增强弱微波的吸收:在532纳米激光器的照射下,持续应用的参考微波会干扰信号微波,导致NV光致发光(photoluminescence)的振荡。值得注意的是,实验过程中所需的参考微波强度仅为200 nT,频率分辨率为1/t,在t=10,000 s时为0.1 mHz。这一方法适用于制造更大的金刚石传感器,进一步提高灵敏度的同时,也极大地促进了其实际应用。
此次实验中,团队通过引入适度的辅助微波显着改善了NV色心对弱场的响应,证明了即使在没有自旋控制的情况下,NV色心也可以用作微波磁力计的高灵敏度传感器。除此之外,实验组还将该方案应用于承载NV色心集合的金刚石,实现了0.28 pT的最小可检测微波场和0.1 mHz的频率分辨率。这种金刚石设备可以在极端条件下工作,例如高温或高压环境;同时,得益于这一方案的简单性,测量结果可以直接在更大的传感器上重现,从而进一步提高灵敏度。例如,如果钻石具有与光电二极管相似的尺寸(10 mm×10 mm×1 mm),那么灵敏度可以直接提升到飞特斯拉(1 pT=1 e+30 fT)级别。因此,这一工作为金刚石传感器的实际应用铺平了道路,例如雷达中的微波接收器、无线通信,甚至是射电望远镜等。
德国开发新传感器可提前17年检测阿尔茨海默病
德国波鸿鲁尔大学一个研究小组发现,有可能在任何外在症状开始出现前17年就在血液中检测出阿尔茨海默病。这是通过使用该团队开发的免疫红外传感器实现的。该传感器检测蛋白质生物标志物β-淀粉样蛋白的错误折叠。随着病情的发展,这种错误折叠会在大脑中形成独特的沉积物,被称为斑块。该团队最近在《阿尔茨海默病与痴呆:阿尔茨海默病协会杂志》上发表了用免疫红外传感器获得的结果。
研究人员分析了在萨尔州进行的ESTHER研究参与者的血浆,以寻找潜在的阿尔茨海默病生物标志物。血液样本在2000年和2002年之间被收集和冷冻。测试参与者当时的年龄在50至75岁之间,尚未被诊断出患有阿尔茨海默病。目前的研究将在17年的随访中被诊断为阿尔茨海默病的68人与240名没有得到这种诊断的对照对象进行比较。研究人员想看看在研究开始时是否能从血液样本中检测出阿尔茨海默病症状。免疫红外传感器正确识别了68名最终患上阿尔茨海默病的测试者。
波鸿鲁尔大学的研究人员希望,基于β-淀粉样蛋白错误折叠的早期诊断可以使阿尔茨海默病药物在早期阶段使用,从而产生更大的影响,例如,最近在美国获批的药物Aduhelm。
尽管该传感器仍在开发中,但该技术已经获得了专利。BetaSENSE的目标是将免疫红外传感器商业化,并使其被批准为诊断设备,以便在临床实验室中使用。
日本科学家开发出遥控机器人蟑螂
日本理化学研究所(RIKEN)的研究人员开发了一种遥控机器人蟑螂。该系统配备微型无线控制模块,由可充电的薄膜太阳能电池供电。尽管具有机械装置,但超薄的电子设备和柔性材料可以使这种机器人昆虫自由移动。研究人员于2022年9月5日在科学期刊《npj-柔性电子》上发布了这个结果。这一研究成果将有助于使机器人昆虫的应用成为现实。
研究小组对长约6厘米(2.4英寸)的马达加斯加蟑螂进行了实验。他们使用专门设计的背包将腿部无线控制模块和锂聚合物电池安装到机器人蟑螂上半身后背上。这是根据蟑螂模型的身体建模并采用弹性聚合物进行3D打印的,就像是完美贴合蟑螂后背曲线的一个背包,使刚性电子设备能够稳定地安装在机器人蟑螂身上。

机器人蟑螂采用0.004 mm厚的超薄有机太阳能电池模块供电。Fukuda表示,“安装在蟑螂身体上的超薄有机太阳能电池模块实现了17.2 mW的功率输出,是目前最先进的昆虫能量收集装置的功率输出的50倍以上。”
研究人员将这些组件与刺激腿部运动的电线一起整合到蟑螂体内,并对其进行了测试。太阳能电池采用模拟的阳光充电30分钟,便可以采用无线遥控器让它左右移动。
Fukuda说:“考虑到机器人蟑螂胸部和腹部在基本运动过程中的变形,其胸部采用的刚性和柔性元件的混合电子系统与腹部的超软装置似乎是机器人蟑螂的一种有效设计。此外,由于腹部变形并不是蟑螂所独有的功能,我们的策略可以将这些技术用于其他昆虫(例如甲虫),甚至未来可能会创造类似蝉这样会飞的昆虫。”
美国研发可发光的微型飞行机器人
美国麻省理工学院(MIT)科研人员受到萤火虫的启发,研制了形似昆虫的飞行机器人,在飞行时可以发光,从而实现运动跟踪和通信。相关研究近日发表在《IEEE机器人和自动化通讯》(IEEE Robotics and Automation Letters)上。
这种微型飞行机器人“闪电虫”利用电致发光的软质人工肌肉控制翅膀进行飞行,并在飞行时发出彩光。这种电致发光可以使机器人相互沟通。例如,被派往坍塌建筑物中执行搜救任务时,发现幸存者的机器人可以用灯光发出信号并呼救。依靠其发光能力,这些微型机器人还有可能实现实验室外自主飞行,研究者可以利用智能手机摄像头来进行精确的户外追踪。研究人员称,这项工作为户外环境中的先进运动跟踪系统迈出的重要一步。
