基于SOC芯片的多功能一体机主板的研究设计
2022-11-24乔晓辉李珊如杨丹青王志刚
乔晓辉,李珊如,杨丹青,王志刚
(河北汉光重工有限责任公司 研制部,河北邯郸,056017)
0 引言
近年来数字激光技术、计算机技术等高新技术的蓬勃发展,使得信息化和数字化进程不断加快,办公环境也变得越来越复杂,传统的复印机在功能以及性能上难以满足用户的要求。多功能一体机将扫描、激光打印有机结合,适用于多种办公需求,已广泛应用在商业及政府机构中。但是与国外相比,国内对多功能一体机主板控制核心的技术研发能力相对落后,此外在数据安全方面,也面临严峻的考验。因此,本研究基于SOC片上系统设备功能强大、低功耗、可扩展性强、自主可靠的特点[1],提出一种自主可控的多功能一体机主板的设计方案,在提高复印、打印速度的同时也能确保复印、打印过程中的信息安全,对实现安全复印、打印和保护国防的信息安全具有重要意义。
1 主板硬件总体设计
主板是多功能一体机的重要组成部分,本研究采用的SOC片上系统配备了高性能的CPU和GPU,支持自动裁切,自动纠斜及数字图像处理能力,能够高效处理打印工作和进行用户界面操作,还集成了USB和以太网Mac,实现了智能扫描、打印、复印、存储影像、互联网支持等功能。此外,系统还内置了Crypto加速引擎,支持安全打印。硬件设计框图如图1所示。
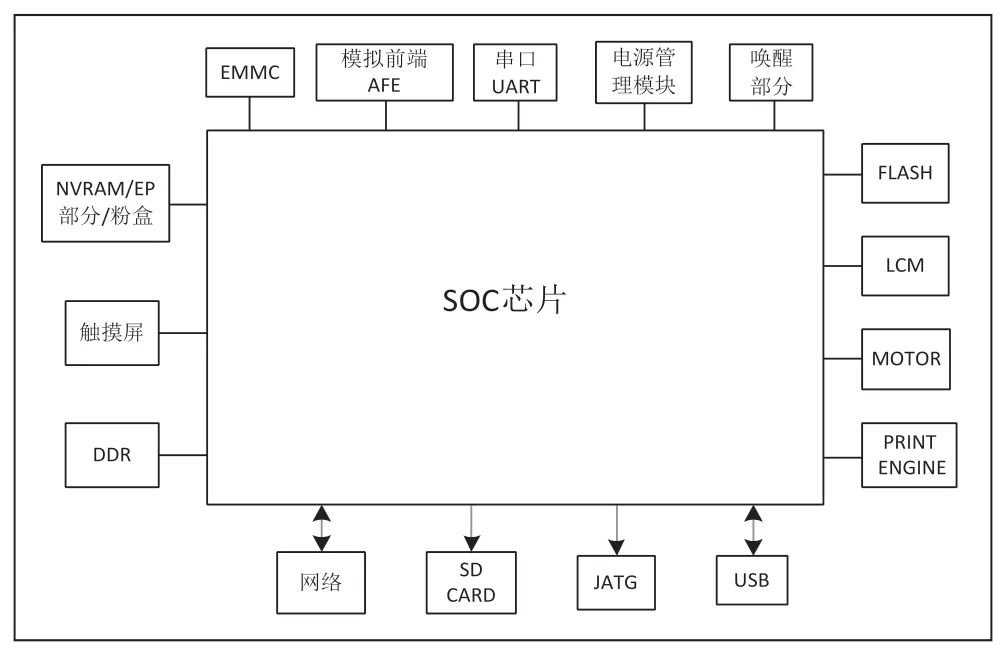
图1 硬件电路设计框图
2 主板功能模块设计
为提高系统的可靠性和可维护性,多功能一体机的主板架构采用模块化设计,整个主板硬件由功能相对独立的扫描模块、马达控制模块、打印控制模块、数字信号处理模块、通信接口模块和电源转换模块组成。功能模块示意图和简单的工作信号流向如图2所示。
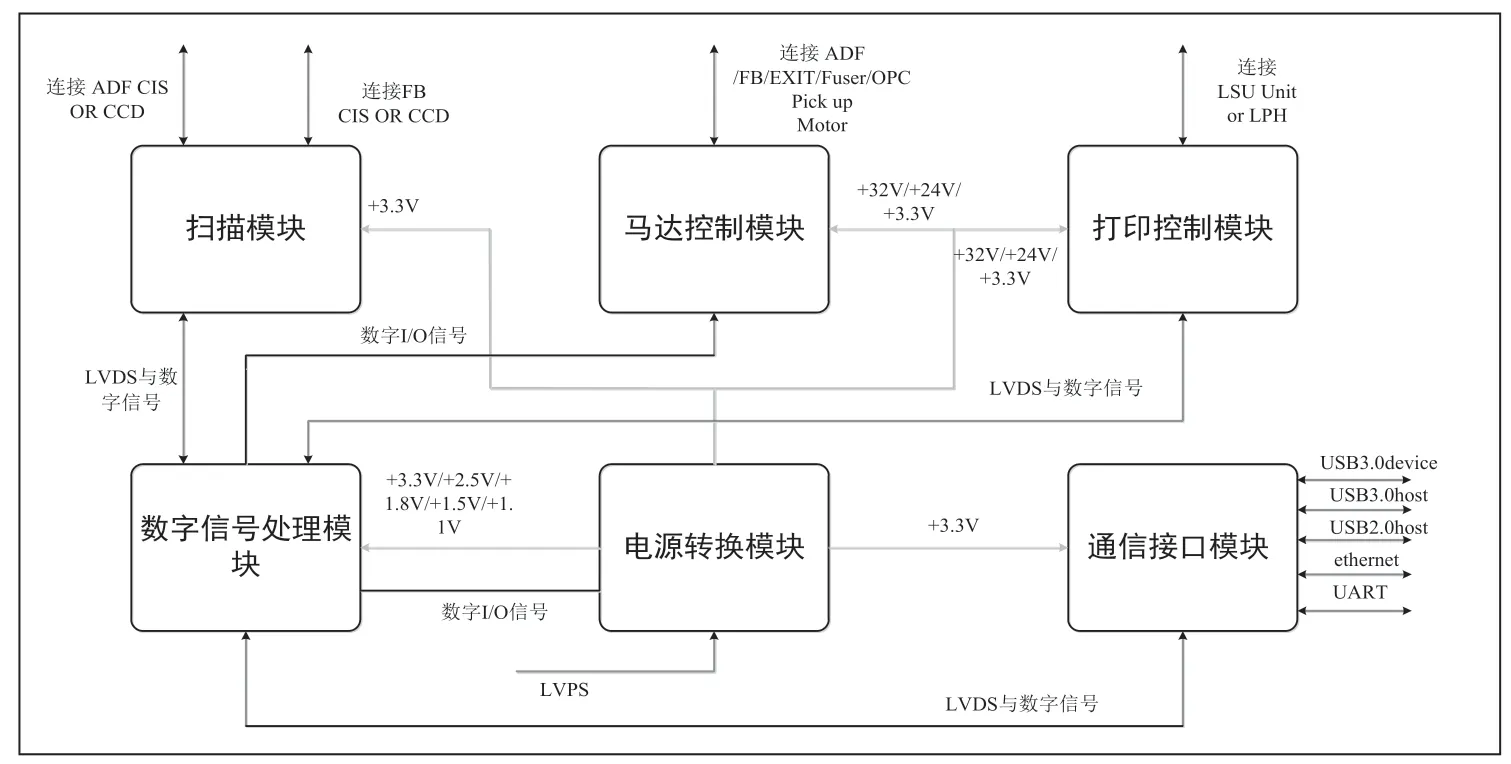
图 2 主板功能模块示意图
■2.1 扫描模块
扫描模块是多功能一体机实现打印输出功能的重要执行机构,扫描模块的工作效率直接影响多功能一体机的工作状况。本研究的主板扫描模块设置ARDF和FB两种模式,其中ARDF模式可以实现自动输稿,并可以双面扫描,具有自动走纸机构;FB模式是平台模式,支持单面、单张纸扫描。两种扫描模式均可实现300/600dpi扫描精度。
扫描模块的核心为感光器件,本研究选取集合精度高、成本低的CIS[2](接触式图像传感器)进行图像前端采集。具体的过程为:图像前端采集将光信号转换为电信号,再通过模数转换器将电信号转换为数字信号传入SOC系统进行后续处理。
■2.2 马达控制模块
主板的马达控制模块分为步进马达控制与直流马达控制两部分,用以产出驱动滚轴让纸张行进的动力。
步进马达透过控制电流与供给的电压产出需要的扭力,透过步进型态如全步,1/2步,1/4步,1/8步可以改善震动与噪音的产生,透过SOC芯片内部的加减速曲线表可轻易地控制马达的启动、停止与转动。
直流马达用于激光扫描打印部位棱镜的驱动和感光鼓电机驱动以达到转动更为顺畅,影像不会抖动,控制也很简单提供稳定的时钟信号然后使能,低电平就转动,高电平就停止。
2.2.1 步进马达控制
主板步进电机驱动部分有ADF、FB、EXIT、Pick up/Fuser这几个驱动电路,下面将选取ADF的步进电机驱动进行介绍,其他类似不再赘述。
步进驱动器是一种将电脉冲信号转化为角位移的开环控制元件。每当步进电机接收到一个驱动脉冲信号,电机就会按照设置的方向转动一个固定的角度,这个角度称为步距角[3]。我们可以通过改变脉冲频率来控制电机转动的速度和加速度,进而达到准确定位和调速的效果。
该部分采用DRV8880PWPR芯片来驱动ADF(自动输稿部件)的步进电机,DRV8880是一款广泛应用于工业的双极步进电机驱动器芯片,该驱动芯片能够驱动高达1.4A 均方根 (rms) 电流或者 2.0A的电流或。采用该芯片电路简单,工作范围电压较宽,简化的原理如图3所示。
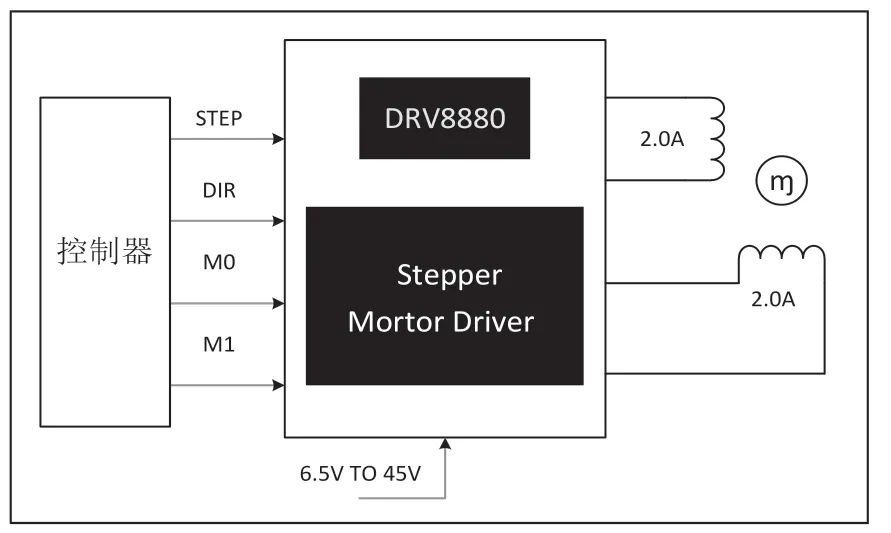
图3 ADF驱动简化原理图
STEP/DIR引脚是驱动芯片的控制接口。多种步进模式的实现,是通过控制器对芯片M0,M1引脚进行设置来完成的。步进模式能够从1/16 步进模式到全步进模式。通过控制芯片专门的 nSLEEP 引脚,使其工作在低功耗的休眠模式下,该模式下能够实现超低静态电流待机。
SOC芯片的马达控制模块引脚0输出一个步进上升沿脉冲信号,驱动芯片内部的微步进分度器前进一步。主板上采用SN74LV595APWT芯片扩展IO口,输出DIR、M0、M1信号到驱动芯片的相应引脚。DIR用于控制电机的转动方向,M0,M1用来配置步进模式。驱动芯片的输出AOUT1、AOUT2、BOUT1、BOUT2到步进电机的绕组A和绕组B。
2.2.2 直流马达控制
多功能一体机OPC鼓(感光鼓)的转动采用直流无刷电机驱动技术。直流无刷电机将有刷电机的电刷、换向器和转子绕组换成了更加精确、稳定的位置传感器、速度传感器和永磁体。直流无刷电机转子转速的影响因素有两方面,一是定子旋转磁场的速度,二是转子的极数。直流无刷电机通过控制定子旋转磁场的频率,让控制中心反复矫正转子的转速。最终达到在额定负载范围内,即使负载变化,电机转子仍然能够维持转速稳定的目的。
SOC芯片的马达控制模块引脚1输出一个OPC鼓步进信号,经过场效应管作为控制输入到连接器引脚,连接器外接无刷直流电机,主控芯片通过PWM脉冲来控制加在驱动电机的电压来控制电机的转速。
■2.3 打印控制模块
主板打印控制模块的扫描方案采取双激光头扫描[4],在扫描效率方面,双激光扫描要优于单激光在扫描。在感光鼓主扫描方向上,两束激光的间隔约为290μm,副扫描方向上间隔约42.3μm,简单示意如图4所示。主扫描方向上的两毫米距离确保了感光器件有充分的时间检测到每条激光束的激光同步信号。双激光头扫描最快可支持打印70ppm(A4LEF)。这种模式具有以下特点:
(1)减少六棱镜电机的旋转速度;
(2)降低了六棱镜电机所产生的噪音;
(3) 减小图像数据频率,降低高速打印的成本。

图 4 双激光扫描原理图
激光扫描单元工作包含六棱镜电机的驱动[5],行扫描同步信号侦测以及两组LVDS视频数据打印信号的输出。该部分在主板设计上将控制信号通过连接器传送到激光扫面单元的部件。采用连接器与多功能一体机的激光扫描单元进行控制与通信。该部分涉及的电路信号有三类:六棱镜电机驱动信号、激光扫描信号、扫描行同步信号,分别如表1、2、3所示。
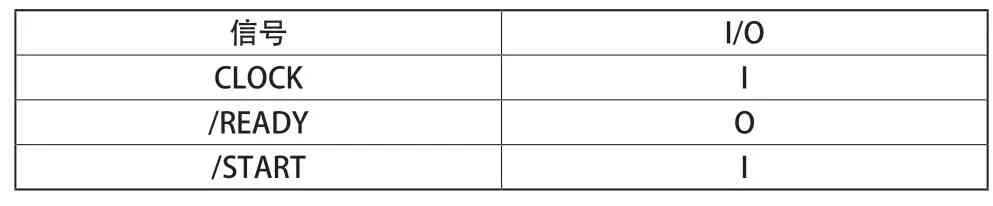
表1 棱镜电机驱动信号
备注:CLOCK信号来自主板马达控制模块的引脚6棱镜电机步进信号,/START信号来自主板扩展IO口,READY信号是在棱镜电机转速稳之后反馈给主板的控制模块,告知其可以开始激光扫描。

表2 激光扫描驱动信号
/APC1信号和/APC2信号来自SOC芯片的打印控制模块,经过漏记开路输出缓冲器连接到外接LSU单元的连接器J22。这两组信号用于控制LSU单元的自动功率控制电路,稳定LD的输出功率,使其不随温度升高和使用增长而改变。VIDEO1+、VIDEO1-、VIDEO2+、VIDEO2-为两组低压差分信号,当VIDEO1+电压大于VIDEO1-超过0.4V的时候激光扫描开启;当VIDEO1+电压小于VIDEO1-超过0.4V的时候,激光扫描关闭;VIDEO2信号与VIDEO1一致,不再叙述。
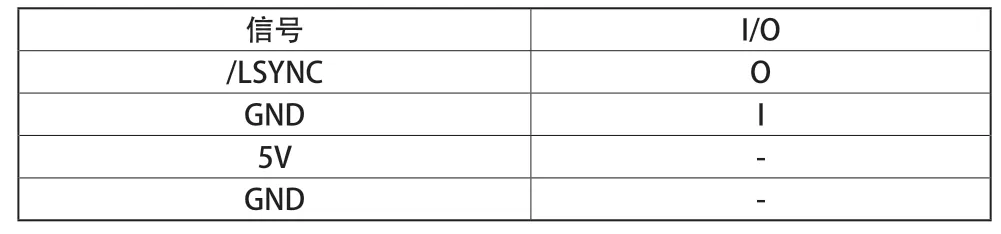
表3 水平行扫描同步信号
LSU激光扫描单元的同步传感器产生/LSYNC同步信号,该信号是扫描单元中不可或缺的逻辑控制量。作为感光元件的同步传感器[6],在激光扫描过程中有着独特的使命,它的存在能够让控制单元实时获取到激光束的路径,从而能够同步到打印过程中纸张的起始位置信息以及每行行首的扫描数据信息。当一行扫描开始时,同步信号反射镜把激光扫描光束反射给同步传感器,传感器将信号反馈给SOC芯片打印模块,主控单元收到信号立即通知控制电路开始一行新的扫描。
■2.4 数字信号处理模块
数字信号处理模块可以实现的功能有:ADF自动输稿器、平台扫描以及打印炮制路径需要许多的光电遮断器侦测纸张的位置,并且可以通过超声波传感器判定ADF是否有多长扫描的问题;依照特定对的时序启动高压与打印影像以及侦测是否有卡纸,另外纸匣子中的传感器负责纸张大小方向以及纸张剩余量的侦测,还有显影单元传感器侦测墨粉水位,适量补充粉量,以达到顺畅大打印和高质量的影像输出。另外也与各个模块之间做沟通连接,控制或者数据传输。
■2.5 通信接口模块
主板上的通信接口设USB 3.0 Device、 USB 3.0 Host、 USB 2.0 Host、Ethernet 1Gb/S.达到方便连接PC机、网络或者U盘的功能。表4是通信接口个功能描述。

表4 主板通信接口
■2.6 电源模块
为了能够是支持上层软硬件的开发,SoC 硬件平台的接口众多,各种接口所需要的电压标准不同,为了使系统可以正常工作,本文设计了一套电源系统,为各个硬件模块提供所需的电压。
本次设计并没有220V电源主开关,当接入220V电源后,24V电源输出仅为8V电压。主控板上的连接器J41接入电源,经过DC/DC电压转换模块变换输出5V_R,触发器预置端引脚上电后即为高电平,经过电阻和电容组成的上电复位电路上电瞬间为低电平,接入触发器并对触发器复位,确保触发器U51输出高电平,之后电容充满电,变为高电平,多功能一体机处于待机状态。
在待机状态下,按下 POWER BUTTON按键SW1(或者面板上电源开关,二者并联),经过电容耦合,触发器的清零端引脚变为低电平,触发器的输出引脚输出低电平,两个N沟道场效应管Q22、Q23依次导通,Q61(N沟道增强型场效应管)的栅极变为高电平,漏极和源极导通,Q62(P沟道增强型)的栅极变为低电平,源极和漏极形成导通通道,输出5VU。具体的产生原理如图5(a)所示。
5VU经过降压稳压器产生2.5VU,在经过U53电压比较器形成1.1VU_EN使能信号,控制U81输出1.1VU。1.1VU再经过U53电压比较器形成3.3VU_EN使能信号控制U52输出3.3VU和U29输出1.5V_DDR。1.1VU、2.5VU、3.3VU、5VU和1.5V_DDR为主控芯片SOC的唤醒模块进行供电,使其工作。
POWER BUTTON同时经过D14将电压比较器U49的3引脚拉置0.7V左右,低于当2引脚的2.5V,U49的1脚输出低电平接入主控芯片SOC的唤醒模块引脚2,SOC芯片收到后从唤醒模块引脚6输出高电平,控制Q14(N沟道增强型场效应管)导通,进而控制Q55导通,输出形成5V_SAV,5V_SAV经过主板上的连接器J32的1脚将反馈信号反馈到电源板,控制电源板将8V电压提升至24V。唤醒模块的引脚6同时控制输出3.3V_SAV和24V_SCANNER。Soc主控芯片输出电源请求信号PWR_REQ信号,控制2.5V_SAV、1.1V_SAV输出,同时产生SYS_EN,控制其他电源的输出的先后顺序,以满足芯片的加电和断电时序。
在开机状态下按下POWER BUTTON按键,在触摸屏上选择关机,SOC芯片输出POWER_OFF信号,经过Q58(增强型场效应管)将U51引脚13变为低电平,并对U51进行复位,使引脚8输出高电平,之控制与开机过程相反,不再详述。电源板最终被拉低为8V,进入待机状态。此部分流程参考图5(a)中所示。

图5 电源工作原理
3 软件设计
多功能一体机软件设计基于安卓平台,本次设计软件结合了扫描和打印两大部分的功能,上层UI收到带有参数设置要求的复印信息请求后,先将请信息传递给AppCopy线程,AppCopy线程根据输入参数对原告进行扫描,然后将扫描存储的图像文件打印出来,整个流程如图6所示。

图 6 多功能一体机工作流程
4 结论
本文提供了一种应用于多功能一体机的主板设计解决方案,本设计通过选用高度整合型系统SOC芯片,集成扫描控制核心逻辑和打印核心控制逻辑,搭载高速周边接口,实现稳定高效地扫描打印。相较于传统打印设备需要机芯打印控制器及打印语言控制器的硬件设计,有效降低了系统成本。
