农用机械负载敏感分流同步驱动仿真研究
2022-11-23穆洪云罗艳蕾邓行杜威刘尧
穆洪云,罗艳蕾,邓行,杜威,刘尧
(1.贵州大学机械工程学院,贵州贵阳 550025;2.六盘水师范学院矿业与土木工程学院,贵州六盘水 553000)
0 前言
随着科学技术的进步,农用机械迎来了无人驾驶技术[1],即在传统农业机械上加入传感器和控制器进行控制,能够大大提高农用机械的生产效率,但是对于农用机械行驶的同步精度提出更高的要求。对于液压驱动的农用机械,要求它行驶时具有良好的直线行驶性、高准确性,必须提高驱动液压马达的同步精度。对于液压系统的同步控制,国内外学者进行了大量研究[2-13],谭顿等人[14]提出一种基于改进粒子群算法的双液压马达同步控制策略,仿真结果显示该方法能够有效减少系统超调量与同步误差,并且能够提高系统响应速度。陈靖等人[15]提出一种同步阀+电磁比例阀的液压驱动地盘,为农用机械底盘设计提供理论依据。丁海港等[16]提出一种抗时变偏载的负载敏感变速分流同步驱动系统,该系统可以有效提高执行元件的同步精度。
本文作者在以上研究的基础上提出一种农用机械负载敏感分流驱动系统,该系统同时具备负载敏感系统和分流阀的优点,与闭环反馈同步控制相比,该系统具有更好的经济性,能够满足农用机械高直线行驶性、高准确性的要求。
1 系统原理分析
1.1 液压工作原理分析
如图1所示,该系统为开式系统,采用了阀后压力补偿技术,当多路阀处于左位或右位工作时均能实现压力补偿功能。动力源3带动负载敏感泵1转动产生高压油,从负载敏感泵1出来的高压油通过分流阀4分别进入多路阀5.1和5.2,当多路阀5.1和5.2处于中位时,高压油直接通过冷却器10和过滤器11流回油箱12,实现卸荷功能;当多路阀5.1和5.2处于左位工作时,高压油分别通过压力补偿阀6.1和6.3进入液压马达9.1和9.2,液压马达9.1和9.2开始转动,从液压马达9.1和9.2出来的低压油分别通过单向阀7.2和7.4进入多路阀5.1和5.2,再通过冷却器10和过滤器11流回油箱12。当冷却器10和过滤器11发生堵塞时,低压油通过单向阀7.5和7.6流回油箱12。
1.2 压力补偿原理与分流原理分析
取压力补偿阀分析压力,则:
(1)
Δpn=pP-pn
(2)

取分流阀和多路阀分析流量,则:
(3)
式中:qn为通过阀芯流量;Cdn为流量系数;An为分流阀和多路阀阀芯开口面积;m为指数。

2 系统建模
2.1 负载敏感泵建模
根据图1中负载敏感泵1工作原理,利用AMESim中的HCD库建立如图2所示模型,系统仿真前,柱塞油缸下腔在弹簧力的作用下流回油箱,变量泵排量最大。开机后负载压力引至负载敏感阀弹簧腔,两端受力平衡pP=pLS+3 MPa,负载敏感阀阀口关闭,变量泵的斜盘倾角维持在某一位置,提供比例溢流阀阀所需的流量。流量增加过程,当节流阀开口增大,阀口的节流作用减弱,Δp减小,负载敏感阀两端压差Δp=pP-pLS<3 MPa,负载敏感阀阀芯向上移动,柱塞缸下腔流量流回油箱,阀芯往下移动,变量泵排量增加。流量减少过程,当节流阀开口减小时,阀口的节流作用加强,Δp增大,负载敏感阀两端压差Δp=pP-pLS>3 MPa,负载敏感阀阀芯向下移动,流量进入柱塞缸下腔,变量马达排量减小。高压待机状态,pP=pLS,3 MPa弹簧力将负载敏感阀推向上位,变量泵持续输出的流量将导致出口压力迅速上升并超过30 MPa,压力切断阀克服30 MPa弹簧力,阀芯往下移动,使压力油流入柱塞缸下腔,推动斜盘倾角处于排量几乎为0的位置,变量泵提供保持高压状态下系统内泄漏的流量。
在图2中,节流阀模拟负载流量需求,比例溢流阀模拟外负载变化。设定节流量口直径为7 mm,负载压力为0~20 MPa,仿真时间为5 s,则节流阀阀前、阀后压力和流量如图3所示。可知:系统在0.6 s时达到稳定,稳定后阀前阀后压差为3 MPa。随着负载的增加,流量不再发生变化,实现流量与负载无关。
2.2 分流阀建模
根据分流阀的工作原理,建立如图4所示模型,液压油通过1口分别进入中间的2个容腔,其中左侧的容腔连接质量块左腔,并且通过节流阀连接右侧弹簧腔,另一侧容腔同理。当2口和3口的负载相同时,阀芯位于中间,两腔阀芯开口大小相等,流量相等;当2口压力增大时,需要更大流量,阀芯向左移动,左侧阀芯开口增大,流量增加,右侧阀芯开口减小,流量减小,使得2口和3口的流量相等,其他工况同理。
2.3 多路阀建模
根据多路阀的工作原理建立如图5所示模型,3口为进油口,2口和4口为出油口,1口和5口为回油口,右端比例电磁体可以根据输入的电信号的大小输出对应的力,推动阀芯移动,实现左位、中位和右位工作。
2.4 系统建模
根据农用机械液压驱动原理(图1),建立如图6所示模型。考虑农用机械在行驶过程中实际情况,在液压马达9.1和9.2后增加了转动惯量。忽略系统泄漏,设置仿真参数如表1所示。
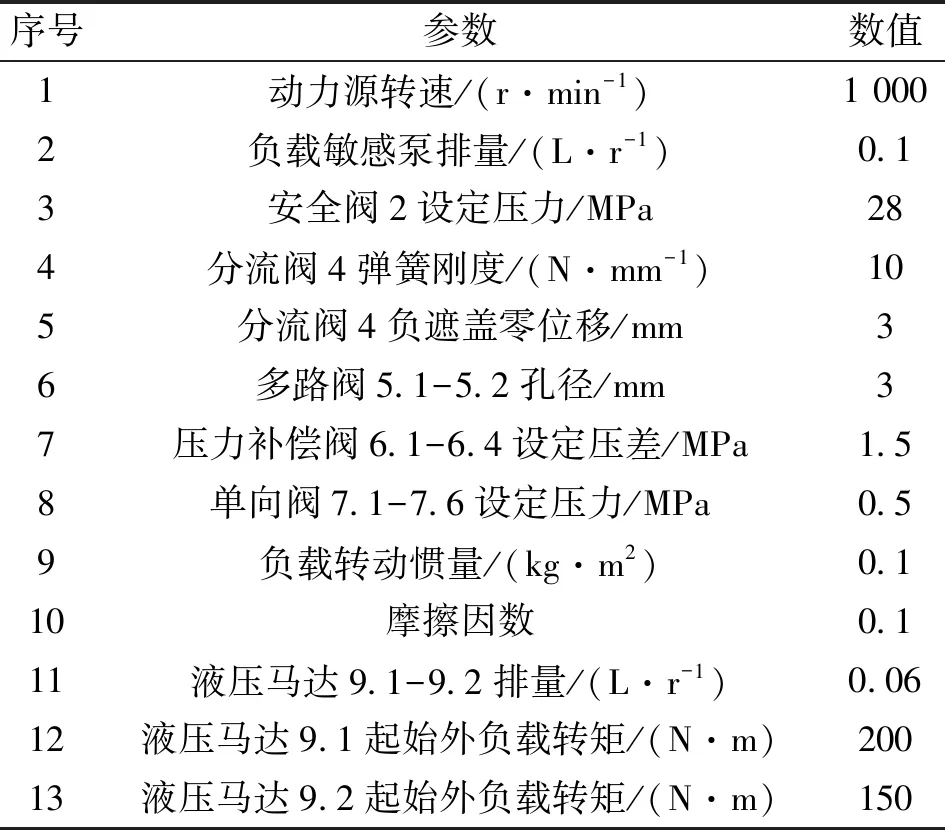
表1 仿真参数
3 仿真分析
3.1 同步分析
设定仿真时间为5 s,步长为0.01 s,进行仿真,分析液压马达9.1和9.2的同步转速曲线和同步误差曲线,仿真结果分别如图7和图8所示。
由图7和图8可知:当多路阀全开时,系统在0.9 s时达到稳定转速,液压液马达9.1转速为369 r/min,液压马达9.2转速为371 r/min,达到稳定转速前液压马达9.1和9.2最大的同步误差为851 r/min,达到稳定转速后,液压马达9.1和9.2同步误差为2 r/min;当多路阀半开时,系统在0.8 s时达到稳定转速,液压液马达9.1转速为88 r/min,液压马达9.2转速为87 r/min,达到稳定转速前液压马达9.1和9.2最大的同步误差为466 r/min,达到稳定转速后,液压马达9.1和9.2同步误差为1 r/min。故该系统在偏载启动时,能够迅速达到稳定转速,并且同步精度高,能够应对农用机械复杂的启动环境。
3.2 鲁棒性分析
为了分析系统的鲁棒性,在t=2.5 s时,将液压马达9.1外负载转矩减少50 N·m,将液压马达9.2外负载转矩增加50 N·m,仿真结果分别如图9和图10所示。
由图9和图10可知:当负载突变时,系统在0.7 s内恢复稳定,当多路阀全开时,最大同步误差为179 r/min,当多路阀半开时,最大同步误差为280 r/min。故该系统具有较好的鲁棒性,能够满足农用机械复杂的行驶环境要求。
4 结论
提出一种农用机械负载敏感分流驱动系统,并对该系统进行建模和仿真。仿真结果表明:该系统具有响应速度快和同步精度高的优点,在偏载启动时,无论多路阀全开还是半开,液压马达均能在0.9 s内达到稳定转速,液压马达转速稳定后同步误差小于2 r/min。该系统具有较好的鲁棒性,当负载发生突变时,系统能在0.7 s内达到稳定的目标转速。该系统能够适应农用机械偏载启动和负载突变的工况,满足现代农用机械在行驶过程中所要求的高直线行驶性、高准确性,为现代农用机械底盘设计提供了理论指导。
