基于VISSIM和ROS小车的V2X技术对智能汽车路线优化的研究
2022-11-22柯晔伟
柯晔伟
福建船政交通职业学院汽车学院 福建省福州市 350007
汽车智能驾驶已经成为未来很长一段时间汽车工业、通信行业乃至互联网行业的研究方向和研发目标。汽车智能驾驶指的是利用通信设备和智能程序,提高汽车的智能化水平,在车辆行驶过程中逐步减少人员操作,分阶段向完全无人驾驶的方向发展。而要实现完全无人驾驶,智能汽车就必须具备对行驶路线的选择能力。在车路协同网路下,利用V2X技术能实现车辆对于道路状况的及时获知、分析判断、优化选择的能力。本文应用仿真分析和实物试验相结合的方法,研究V2X技术的应用对于车辆路线优化选择、缓解交通拥堵、提高出行效率的积极作用。
1 概述
V2X技术的指的是以汽车作为一个终端,通过5G网络和车联网与其他终端进行信息交换。此处所述的其他终端有着多样化的种类,既可以是其他的智能汽车,也可以是云平台,更可以是个人电脑或手机。这些终端在车联网平台内实现万物互联,成为智慧城市建设的重要组成部分[1]。V2X技术的原理如图1所示。
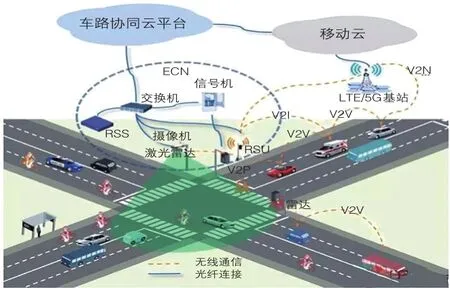
图1 V2X技术运行原理图
V2X技术有着诸多得天独厚的优势:①可以实现车辆对前方道路路况的及时掌握,规划、优化出行路线,有效降低交通拥堵的发生,提高出行效率;②可以为车辆提供“上帝视角”,弥补车辆在路况感知中存在的盲点,降低车辆发生交通事故的概率;③可以将车辆与非车辆终端连接,完成信息交换,既可以满足车上成员的信息化需求,也有利于控制中心的管理。
目前中国市场的V2X发展方兴未艾,以百度为代表的互联网公司和华为为代表的通信公司都已经着手V2X技术的研发,特别是随着5G网络的建设,V2X技术即将进入发展快车道[2]。
2 研究参数及优化指标的确定
本文借助仿真实验和实物试验,采用控制变量法和对比分析法,研究V2X技术的应用和推广对于智能汽车路线优化能力提升的效果。接下来分别说明仿真实验和实物试验所选择的变量和测试量。
(1)仿真实验:模型搭建设定3种基本场景:①完全没有V2X技术的道路;②有车路协同,且有50%的汽车使用V2X技术;③有车路协同,100%的汽车使用V2X技术。以上3种基本场景,将V2X技术作为唯一变量,除此之外的所有变量均相同。另外,设置3种测试量:①同样一辆车在某个时间段内到达相同目的地所花费的时间t(s);②某个路口W的拥堵持续累积时间T路口(s);③整个模型中所有车辆的事故率F(%)。分别在每个场景中采集3种测试量,并进行横向对比。
(2)实物试验:由于场地有限,仅设置2种场景:①所有小车均使用V2X技术;②所有小车均不使用V2X技术,因此仅将ROS小车小车是否使用V2X技术作为唯一变量,其他所有因素完全一致。设置1种测试量,智能小车出发并到达相同测试点所耗费的时间T台(s)。分别在每个场景中收集测试量,并进行对比。
3 基于VISSIM仿真软件的模型构建及实验
在确定了变量和测试量后,首先使用VISSIM仿真软件开展仿真实验。
3.1 VISSIM仿真软件概述
VISSIM仿真软件是德国PTV公司基于时间间隔和驾驶行为的微观交通仿真软件[3]。VISSIM软件既可以单独建模,也可以通过不同接口与其他仿真软件联合建模。VISSIM软件支持模拟场景的自定义,用户可依据需求对地图、车辆、交通设施、行人等诸多元素进行设计和定义,既可以将实际存在的某个城市的道路全部输入,从而对城市交通进行全面的优化分析,同时也支持用户根据研究需要设计地图场景,对单一道路或单一车辆进行驾驶策略的研究。
3.2 模拟城市构建及城市道路元素的确定
前文已经说明仿真实验的场景、变量以及测试量,因此首先要构建一个模拟的城市、道路,以及道路上的各种元素。部分模拟场景的效果图如图2所示。

图2 VISSIM仿真软件构建的虚拟场景效果图(部分)
(1)确定实验的场景为一个虚拟的城市的一部分,这部分的城市的总体轮廓近似于矩形,其中包含了30个形态不规则的街区,且街区排列随机分布,总体为3×10排列。
(2)道路设计参考中国大多数二线城市的道路设计。普通道路设计为双向6车道,设置有5座双向高架桥、5座多向立交桥,设置27个十字路口,每个十字路口分为左转、直行和右转车道。
(3)道路最高车速为60km/h,红灯和绿灯时长都为60s、黄灯5s,交通事故的平均处理速度600s。
(4)场景的运行时间模拟设置为18:30—19:00,因为这个时间段是中国大部分城市的下班高峰期,汽车数量最多、路况复杂。
(5)为给模拟道路设置通行难度,在模拟城市内设置5处交通拥堵点,即这5处周围的车流量高于其他位置3倍、行人数量为其他位置的5倍。这一设置是为了模拟写字楼聚集区或医院、学校附近附近的道路状况。
(6)模拟场景中包含:汽车、行人、非机动车等3种交通要素,其中汽车10000辆、行人10万人、非机动车30000辆。
(7)所有道路均具备车路协同的沟通能力。
确定不变的因素后,载入路网、构建虚拟城市,并载入场景控制程序。
3.3 仿真实验车辆参数的配置
前文说明了本仿真实验中的不变量,唯一变量是车辆是否具备V2X技术,因此车辆参数的设置及车辆控制逻辑的设计至关重要。本次实验中出现的10000辆车均为自动驾驶车辆,每辆车均具备模拟城市内的路线记忆、自我感知路况、自动避险等功能。换言之,每辆车都可以根据用户的需求规划行驶路线,并完成自动驾驶,而选择路线的理由是行驶里程最短。
在其他变量和基础场景完全一致的情况下,按照具备V2X技术车辆的不同占比,分别进行3次仿真实验:第一次,具备V2X技术的车辆占0%;第二次,具备V2X技术的车辆占50%;第三次,具备V2X技术的车辆占比100%。在确定变量后,通过VISSIM软件的COM接口载入变量的控制程序。控制程序最核心的不同就是具备V2X技术的车辆,在一定区域内(此处区域设置为整个模拟城市)可以实现信息互通,同时还可以与路基中继基站交换信息。获得路况信息后,车辆可以利用自身自动驾驶功能重新规划路线,并将规划信息分享,避免多数车辆规划同一线路而导致的新的拥堵。以上假设均为理想状态,不考虑信息的承载能力和传递速度。路线选择的依据是里程和通勤时间的优选,利用函数L(x)计算得出,函数L(x)如公式(1)、(2)所示。
式(1)、(2)中,
S 行驶总里程;
t 车辆出发至到达目的地的总运行时间;
T车车辆发生拥堵的时间
依据《常见疾病的诊断与疗效判定标准》,医务人员可以在常规的术前检查活动后开始准备紧急腹部准备。针对急性阑尾炎的临床表现,做好术前剃须、预防手术感染、严格禁止术前进食、预防术后腹胀、避免OCC。术中恶心呕吐的发生,术前禁止灌肠,确保手术实行效益;用剑突、大腿外阴1/3、腋中线进行皮肤准备的范围是大腿的主要组成部分。常规的准备工作已经完成。提供应急设备以避免吸入性肺炎并改善患者的身体机能[6]。
P1、P2、P3加权系数
将公式(1)和公式(2)转换为程序后输入仿真软件,计算机根据用户选择的出发点和到达点计算总里程,并根据路况信息预测通勤时间和堵车时间,每条路线都能计算出一个L(x)值,取获得最小值的路线作为行驶方案。
3.4 仿真实验结果分析
在同样场景下,控制变量进行3次仿真实验,每次实验模拟城市下班高峰期18:30—19:00,持续时间都是30min(1800s)输出多项数据。对数据进行整理后,将实验测试量的实验结果列表对比,对比结果如表1所示。

表1 仿真实验数据分析表
在仿真实验中,V2X车辆的占比是唯一变量,除此之外的所有条件完全一致。模型中的所有汽车都具有自动驾驶功能,即有自主避险的能力。以下将针对三组实验数据进行分析。
(1)样车总通勤时间。三次仿真实验均选择相同的目标车辆,出发地和目的地也完全一致,且车发时间和路况设置也一模一样。第一次实验中目标车辆总通勤时间为1592s;当50%的车辆具备V2X技术后,通勤时间缩短至1032s,通勤效率提高35.18%;当100%的车辆具备V2X技术后,通勤时间明显缩短,为763s,通勤效率提高52.07%。分析以上数据可知,V2X技术的应用,可以有效缩短通勤时间,提高通勤效率。
(2)W路口拥堵累积时间。在整个模拟城市中,选一个地理位置最中的路口(W路口),作为监测对象。监测从18:30—19:00的时间段内,路口的拥堵时间总时长。仿真软件内的自带程序会对路口拥堵状况进行分析和定义,并计算处拥堵累计时长。当有50%的车辆具备V2X功能时,W路口的拥堵时长缩短45%;当所有车辆都具备V2X功能后,W路口的拥堵时长缩短79%。从数据分析可以看出,V2X技术的全面介入,通过提前预警、分散车流等措施,可以使单个路口的拥堵得到极大缓解,对整个路口的通勤效率提升有着极大的作用。
(3)模拟城市路况内事故率分析。由于模型中所有的车辆均具备自动驾驶、应急避险的功能,因此车辆自身具备极强的规避事故的能力。但是按照初始设定的程序,模型中的非机动车和行人依然具有交通行为的不确定性,因此模型中仍然有交通事故的发生。V2X技术介入程度的不同,模型计算出来的事故率分别为3.22%、2.14%、0.89%。分析可知,虽然3种情况下事故率都不高,但是V2X技术的应用,依然对降低事故率有着极大的促进作用。
通过对以上数据的分析可知,V2X技术的应用可以使一定区域内的汽车及车路协同设备形成局域网,高效率、无障碍的分享车况和路况信息。车载电脑接收这些信息后计算各种行驶方案,最终获得最优行驶路线,且随着道路状况的不断变化,最优路线也会改变,因此车辆始终保持最佳行驶状态。
4 基于ROS小车的实物试验
仿真实验的优势在于可以模拟整个城市的交通状况,但是实验过程中的路况设置都是计算机程序计算出来的,实验结果与实际情况可能存在偏差,因此需要通过简单的台架实物实验进行验证。仿真实验完成之后,利用ROS小车开展进一步研究,对比分析仿真实验的结果与台架实物试验结果之间的关系,验证仿真实验结果的有效性。
4.1 ROS智能小车简介
ROS智能小车是一款搭载行车电脑的运动底盘。智能小车上装有激光摄像头,用于采集路况图像;装有OTA天线,并接收其他车辆和路基信号器发出的路况信息,同时还能将路况信息的分析结果发送至局域网,与其他车辆分享。智能小车搭载了两个控制器,分别是树莓派和ROS小车控制器,两者之间通过串口通信来传输数据。其中树莓派上安装了Ubuntu,用于处理路况信息并对车辆的行驶形态进行计算和调整、对路况信息做出分析、规划最优路线;ROS小车控制器用于控制运动底盘和采集里程计信息、电池信息、IMU信息。另外,为了便于车辆识别和记忆路线,智能小车还配备了遥控器。
4.2 实物试验的设置
实物试验不能如仿真实验一样模拟整个城市,只能在有限的空间内搭建简易的试验现场,尽可能的模拟智慧道路的运行状况。通过控制变量法变更试验场景,测试智能小车对行驶路线的优选能力,证明V2X技术的应用的确能有效的提升车辆的通勤效率。
试验场景的基础是一张智能小车行驶的标准地图,在地图上放置纸箱,模拟建筑物,构建一条通行道路。地图勾画了小车可通过视觉分析进行识别的路线,同时小车还可以识别纸箱等障碍物。地图的外围放置3台车路协同的信号中转器,其信号范围足以覆盖地图区域内的所有ROS智能小车。试验具体布局如图所示,设途中近点A为目标小车始发点,远点B为目标小车终到点。
试验共使用6台ROS小车,每台小车时速不超过25km/h。所有车辆均具备记忆路线和自动驾驶功能;具备V2X技术,可通过车载收发器与3台车路协同信号中转器交换数据,从而实现有限区域内的局域网。设①小车为目标车,将1、2、3等三条路线全部记忆,小车可基于算法,优选最优路线;其余②-⑥号小车均为障碍车,行驶路线提前设定。①号目标小车的内置算法会根据目标路线的障碍车数量、路线长短、自身行驶速度计算处理论最短通行时长,从而选取最优通行路线。
4.3 实物试验结果分析
(1)情境1:当整个地图只有①号目标车1辆车时,①号目标车根据记忆和算法,优选路程最短的路线1 作为通行路线,通过时长为7.68s。
(2)情境2:当路线2和路线3各有2辆障碍车,路线1只有1辆障碍车时,①号目标车辆依旧选择路线1通行,通过时间为8.32s。试验设置如图3所示。

图3 情境2布置示意图
(3)情境3:当路线1有3辆障碍车,而路线2和路线3都只有1辆障碍车时,①号目标车选择路线3通行,通过时长为9.89s。试验设置如图4所示。
(4)情境4:当路线1有3辆障碍车,而路线2和路线3都只有1辆障碍车时,关闭所有车辆V2X功能、仅保留自动驾驶功能。①目标车依据记忆选择路程最短的路线1通行,通行时长为14.96s。
以上通行时长数据对比如表2所示。

表2 ROS小车实物试验数据分析表
对比分析表格数据可知,当所有ROS小车都具备V2X功能时,小车具备识别拥堵路况、计算最优路线的能力,实际通行效率下降不超过30%;当所有小车不具备V2X功能,仅具备自动驾驶功能时,实际通行效率下降超过90%,通行严重降低。
综上所述,V2X技术的应用,有助于提升ROS小车对于路况信息的掌握,有助于车辆规划最优路线、规避拥堵,从而有效提升通行效率。
5 结论
仿真实验和实物试验的结果都表明,V2X技术的普及和应用,有助于提升智能汽车对于行驶路线的规划水平,有助于增强车辆规避拥堵的能力,有助于提高车辆的通行效率。而随着5G技术的普及、车路协同技术的推广,V2X技术在智能汽车上的广泛应用指日可待。相信在不久的未来,完全无人驾驶的智慧汽车将会遍布大街小巷,人类可以享受智慧交通带来的出行红利。
