一种基于ZigBee的车位检测系统的设计
2022-11-22耿润东
耿润东
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
0 引 言
随着社会经济水平的发展,汽车已成为大多数人的出行工具,给人们带来了舒适便捷的出行体验。但汽车数量逐年攀升给停车库的车位管理造成了压力,人们出行时往往需要花费很多时间和精力寻找车位。随着时间的推移,停车困难的问题也变得更加显著。因此,设计一个车位信息检测系统,通过对停车库空闲停车位信息的有效把控,可以减少上述问题的发生[1-4]。把发展成熟的无线通信技术应用到车位检测技术中可以有效地减少检测系统的设计成本,提高数据的高效性和可靠性。本文设计一种基于ZigBee技术的车位检测系统实现车位数据在检测终端、协调器和云端的传输,云端把收集到的信息进行处理,方便用户查看停车库的空余车位信息。设计的系统具有成本低、可靠性高且容易部署的特点,适合用于室内停车库场景。
1 系统总体设计
用户如果能看到车库实时更新的车位信息就能准确地掌握停车场的车位情况,避免了在停车场里漫无目的地寻找车位。如果能将车位信息显示到网页上,将极大地方便用户停车。设计的系统采用CC2530系列芯片作为系统的主控制装置,CC2530结合了领先的RF收发器和业界标准的增强型8051CPU,是一款低功耗、低成本、性能优秀的处理芯片。整个系统由超声波传感器检测车位信息,通过ZigBee网络经WiFi网关发送到OneNET云平台,使用OneNET云平台的应用编辑器设计车库车位的可视化页面,生成网页地址可以随时随地查看车库车位信息。超声波传感器和CC2530构成系统的信息采集终端,ESP8266WiFi模块与CC2530组成协调器,一个信息采集终端检测一个车位信息,通过定义信息采集终端的设备号绑定检测的车位号实现系统对车位的检测[5]。系统总体结构如图1所示。
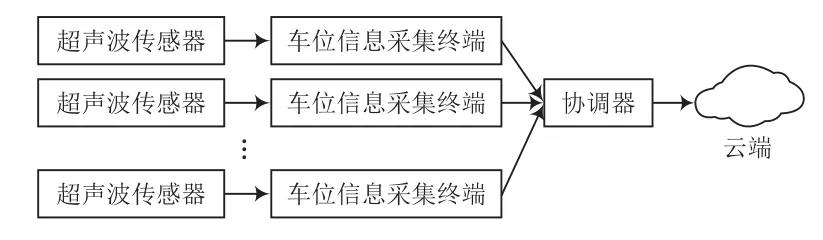
图1 系统总体结构
2 硬件设计
2.1 采集终端
系统的信息采集终端由CC2530、超声波传感器组成。超声波传感器与CC2530接线如图2所示。
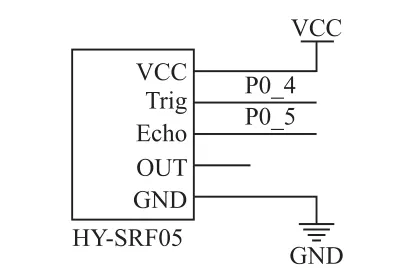
图2 HY-SRF05测距模块电路
超声波传感器成本低、使用寿命长,虽然容易受温度等环境因素影响,但考虑到系统安装环境在室内车库,受到的干扰会比较小,能够满足车位检测的需求[6]。系统用到的HY-SRF05超声波传感器的可测量程为2~450 cm,一般停车库的层间距在3.5 m左右,大多数的车辆高度在1.5~2 m范围内,所以传感器测量的距离范围为1.5~3.5 m,HY-SRF05超声波传感器满足测量条件。通过给超声波传感器Trig引脚超过10 μs的高电平信号,模块将发送8个40 kHz的方波并检测回波,传感器检测到回波时会给Echo引脚输出一段高电平的回响信号,回响信号持续的时间即为超声波发出声波经物体反射后接收回波的时间,声波传输的时间和速度已知,则物体与超声波传感器的距离就可得出[7]。假设相应的时间为t,则声波传输的距离为S=343t/2。将车位检测终端安装在车库层顶上,通过设置距离阈值,判断声波传输距离是否超过阈值即可检测车位的停车状态。
2.2 协调器
系统设计协调器用来汇集信息采集终端采集到的车位信息。协调器与ESP8266WiFi模块相连,ESP8266WiFi模块从协调器获取车位信息,并将获取到的车位信息发送到云端。ESP8266具有强大的片上处理和储存能力,成本较低,非常适合作为网关向云端传输数据。图3为ESP8266模块的接口电路。
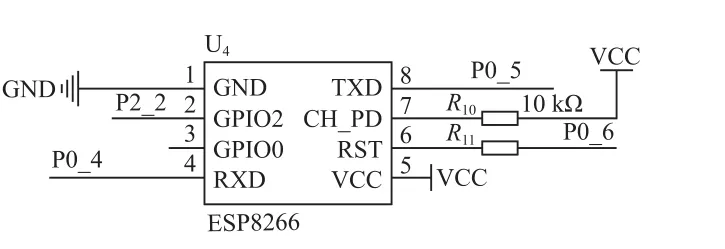
图3 ESP8266模块接口电路
2.3 电源电路
CC2530芯片的正常工作电压是3.3 V,系统的供给电压为5 V,所以需要进行电压转换系统才能工作。AMS1117-3.3是可以输出3.3 V电压的正向低压降稳压器,电压转换电路可以将供电输入电压转换为3.3 V,为系统信息采集终端供电。图4为系统电压转换电路。

图4 电压转换电路
3 软件设计
系统设计选用ZigBee 2007协议栈用于无线数据传输,使用IAR作为集成开发软件。想要实现无线通信一般先进行组网,系统经过组网流程构建网络后,发送节点通过调用协议栈无线数据发送函数实现无线数据的发送,接收节点调用协议栈无线数据接收函数实现无线数据的接收。
车位信息采集模块上电初始化后,向协调器发出入网申请,加入网络后超声波测距模块开始周期性地检测距离信息,并将检测到的距离信息与设置阈值进行比较,将相关信息通过ZigBee网络发送到协调器。信息采集终端工作流程如图5所示。

图5 车位信息检测终端流程
系统由协调器组建网络,协调器经初始化后发出建立网络请求,网络层收到请求后MAC层进行信道能量扫描,找到合适的信道后设置网络参数,参数设置完成后ZigBee网络组建完成。组建网络后,终端节点搜索周围的网络,如果搜索到ZigBee网络则向上层报告,上层协议根据网络层的网络信息选择合适的网络加入,协调器通知终端节点加入网络,收到连接请求时分配网络地址并通过连接响应通知终端[8]。协调器与检测终端建立连接后接收检测终端发送来的车位信息,并将得到的车位信息发送给ESP8266WiFi模块,ESP8266WiFi模块再通过无线网络将数据发送出去。WiFi模块采用透传模式运行,与CC2530串口连接后,通过AT+CWJAP指令选取无线网名称以及密码后加入无线网络,经AT+CIPSTART指令设定服务器IP和端口号连接云端,设置AT+CIPMODE=1进入透传模式进行数据传输[9]。协调器工作流程如图6所示。

图6 协调器数据收发流程
系统选用OneNET云平台设计显示界面,设置好项目属性后,获取设备ID和APIkey与协调器建立连接,获取车位数据建立数据流,编辑OneNET可视化页面,显示车库车位信息。由于实验条件有限,只模拟一个终端检测的情况,选用OneNET图片控件,给两种颜色的图片分别设定一个值,根据数据流返回的值与设定的值作比较来确定显示哪张图片,通过不同颜色的图片就可以直观地显示车位状态[10]。进入OneNET可视化项目的访问链接就可以在网页上查看停车库车位情况。网页界面如图7所示。

图7 可视化界面
4 结 语
系统采用超声波传感器对车位状态进行检测,整个系统采用无线传输的方式,解决了停车库现场布线和后期维护困难的问题,同时减少了线材的使用,节约了成本。将车位数据发送到服务器,并对车位信息进行处理,将车位信息发布到网页上方便了人们对停车库空余车位信息的把控,获得更好的停车体验。后续如果在系统中加入车辆导航、人机交互、费用结算、车位预定等功能,将会有更强的适用性和功能性,对智能车库系统的设计具有良好的参考价值。
