低压塑壳断路器操作机构计算机仿真及优化设计
2022-11-22王少民李志雄陆佳琳苏杭方舒何涛
王少民,李志雄,陆佳琳,苏杭,方舒,何涛
(1.云松电力技术有限公司,浙江 温州 325604;2.俊郎电气有限公司,浙江 温州 325604;3.中国农业大学信息与电气工程学院,北京 海淀 100083;4.温州职业技术学院,浙江 温州 325000)
塑壳断路器是低压配电网最常用的保护电器之一[1],其性能直接关系到下游侧供电回路中电气设备的运行安全。操作机构[2]是塑壳断路器的最核心部件,负责断路器的合闸、分闸、自由脱扣及复位等功能。
低压断路器操作机构的传统设计方法复杂而烦琐,通常需要4个方面的工作和流程才能完成。首先,需要计算和建立断路器操作机构各杆件的力学参数、尺寸、相互位置等技术数据。其次,需要图解法作出每个时刻各机构的空间运动轨迹及位置。再次,须要进行产品设计和制作样机。最后,须要通过样机实验来验证设计方案的正确性。这个过程往往须要反复进行、多次优化修正,这给断路器操作机构设计带来诸多不便。
将计算机辅助设计(CAD)[3]应用于低压塑壳断路器操作机构的设计与优化,对于提升我国低压控制电器的自主设计和数字仿真水平具有非常重要的意义和作用:(1)通过取代人工,可以大大缩短设计周期和提高设计效率;(2)通过虚拟可视化操作,可以随时调整产品参数和改善产品性能;(3)通过Pro/E软件[4]的三维建模和动态过程仿真,可以取代常规的样机制作和物理实验验证,并节省大量人力、物力和财力。
本文首先分析塑壳断路器操作机构的工作原理,然后介绍塑壳断路器的性能参数设计方法。在此基础上,重点介绍塑壳断路器的三维建模过程及仿真结果,主要包括断路器零部件绘制、关键部件应力分析、断路器装配和分解、操作机构动作过程仿真。
1 塑壳断路器操作机构的工作原理
塑壳断路器操作机构由动触头支架e、下连杆f、上连杆g、跳扣j、锁扣m等部分组成。动触头可绕支点O2转动,跳扣可绕支点A转动,手柄可绕支点O1转动。塑壳断路器操作机构的运动,可以分为分闸、合闸、自由脱扣和再扣4个动作。下面将具体介绍4个动作过程的工作原理。
1.1 分闸、合闸动作
分闸和合闸动作[5]过程如图1所示。锁扣m锁定,使跳扣j固定不动,手柄i在外力作用下绕支点O1逆时针转动,当弹簧h越过支点B点时,通过弹簧拉力使连杆g、f脱离死区,牵动触头分开,完成分闸动作。
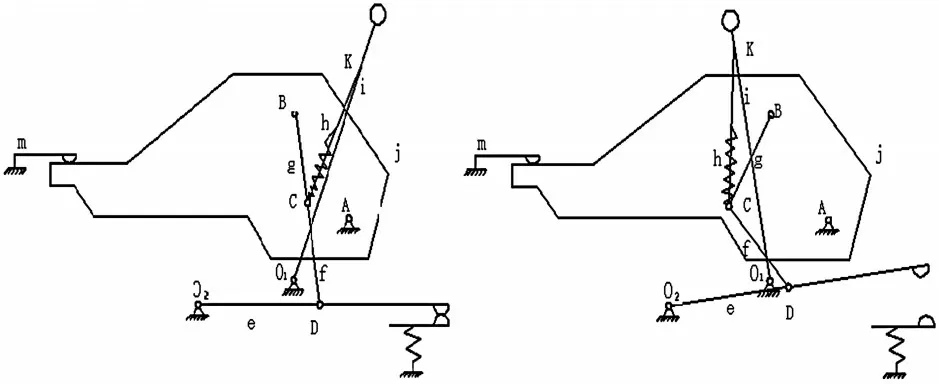
图1 分闸、合闸状态示意图
当手柄反方向运动,并使弹簧越过B支点时,通过弹簧拉力拉动连杆g、f运动,并牵引动触头运动,使动触头和静触头接触,完成合闸动作。
1.2 自由脱扣动作
自由脱扣动作[6]是操作机构最为复杂的一个运动过程,可以抽象为一个四杆机构变成一个五杆机构的过程。在电路过载或短路等情况下,自由脱扣机m脱扣。如图2所示,m脱扣瞬间,整个系统受弹簧h的拉力、触头斥力和重力的作用。跳扣j与手柄i在弹簧h的拉力下分别沿顺、逆时针转动,此时C点受跳扣j限制(C点与跳扣j存在限位关系)使A、B、C三个点相对静止,此时杆g与杆AB(跳扣j上两点)可看作一个整体,即整个机构为e、f、AB、AO2的四杆机构。其驱动力为弹簧h的拉力。
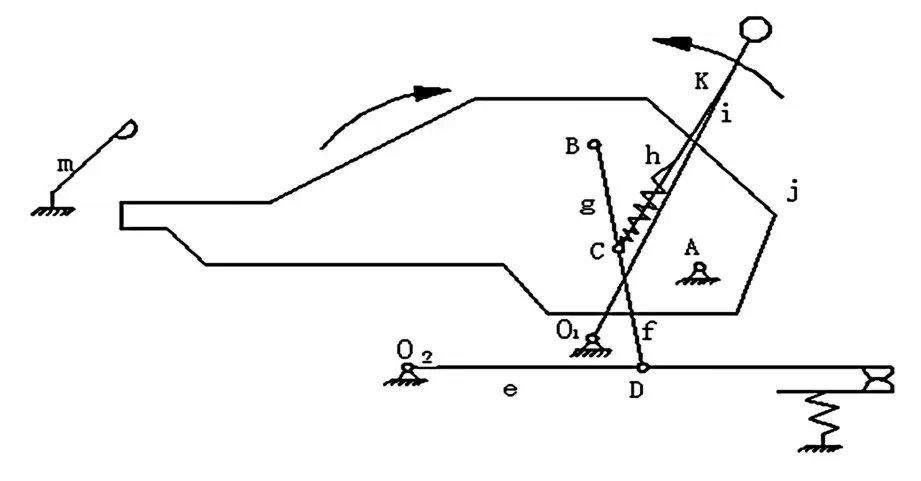
图2 脱扣瞬间运动简图
如图3所示,当跳扣j与手柄i运动到一定位置,即弹簧h越过B点。弹簧h的拉力使杆g脱离锁扣j的限位,杆g相对于锁扣j顺时针运动,此时A、B、C三点不再相对静止,系统又四杆机构转变为由e、f、AB、AO2组成的五杆机构。
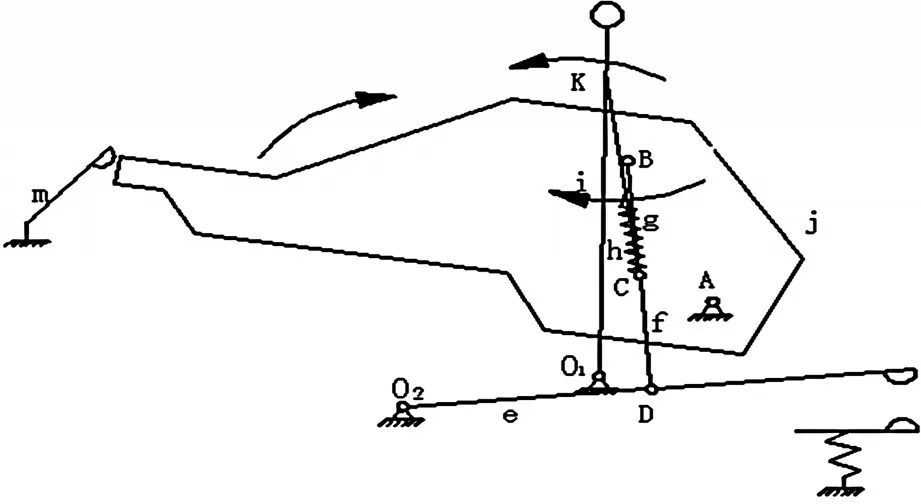
图3 四杆-五杆机构临界状态简图
如图4所示,当达到四杆、五杆临界状态后,机构在弹簧h的拉力下继续运动,从而实现分断状态。在由e、f、AB、AO2组成的五杆机构中存在两个自由度,而整个系统只有一个驱动力(弹簧h的拉力)。因此,触头分断与手柄无关,同时系统运动与初始条件(四杆、五杆临界状态)时的运动规律关系很大。
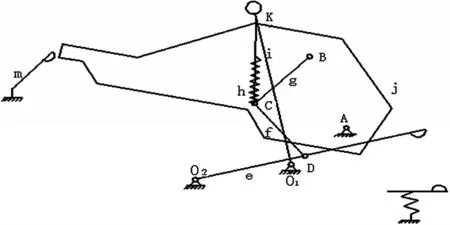
图4 自由脱扣分断状态简图
1.3 操作系统的再扣
操作系统的再扣[7]就是使m重新锁定锁扣,锁扣j再次被固定(C、O2两点固定不动)。此时,系统为e、f、g、CO组成的反四杆机构,触头的运动再次与手柄i联系,在合闸时弹簧h为反四杆机构的驱动力。此时机构为分闸状态,可以通过搬动手柄i完成手动合闸,如图5所示。

图5 操作系统再扣状态
2 塑壳断路器性能参数优化设计
2.1 塑壳断路器主要性能指标
2.1.1 触头开距
触头开距是指动静触头之间的最长距离,即分闸状态时动静触头之间的距离。开距的作用是,在一定的短路电流下动静触头断开,触头之间有一定的间隙空间,能把电弧拉长拉细,增加其自然灭弧能力;也为了在规定的试验电压下不被击穿而引起电弧重燃。原则上触头开距越大,电弧越容易被拉长,也就越容易熄灭,但考虑到塑壳断路器的总体高度已经确定,给下触头和附件腔留出合适的空间后,确定开距取21 cm较为合适[8,9]。
2.1.2 触头超行程
超程的实际测量方法是,在合闸位置时,移去静触头,测量此时动触头继续运动的距离即为超程。塑壳断路器操作机构设计时,要保证在断路器电寿命结束前,动静触头仍能可靠的接触。一般规定,超程设计范围为2~4 mm。
2.1.3 触头终压力
断路器的触头终压力主要取决于触头通过较大电流时,不至于因电动斥力产生跳动而引起熔焊。但它有别于采用短路电流产生的很大电动斥力,使得短路电流尚未达到最大值时,触头在瞬动机构动作之前被斥开,以取得限流的效果。因此,触头终压力是个限定范围内的值。脱扣器设计值是在12倍额定电流(100 A)即1200 A时开始动作,在电流1200 A时,得电动斥力为5 N,而当电流增大到2400 A(短路电流)时电动斥力为10 N左右。因此,设定触头终压力为每相大约10 N。
2.2 塑壳断路器相关参数及空间尺寸计算
断路器手柄处于合闸位置,弹簧力作用线KC与上连杆BC有一定的夹角ALF,称为合闸安全角,这时下连杆CD上的分力就是触头系统的合闸力,该力相对与主轴回转中心O2的转矩就是合闸力矩,如图6所示。
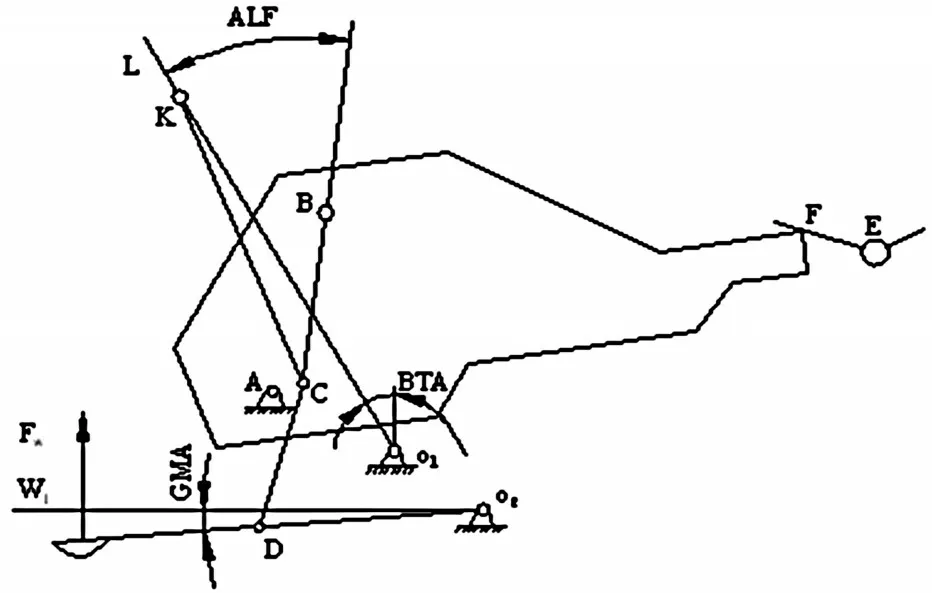
图6 合闸力及力矩计算图
合闸力矩,即下连杆CD受力对O2的转矩,设合闸时触头反力(给定的触头初压力)为Fw,则求出相应的反力矩和安全合闸条件。
根据图6建立的对应坐标系,如图7所示。
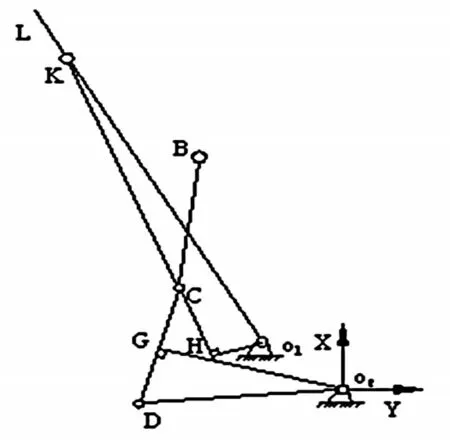
图7 操作机构坐标系
主轴回转中心O2为坐标系原点,给出下列参数。
点坐标:A、O1、E坐标;B相对于A的坐标(两种状态:再扣和自由脱扣)、F相对于E的坐标。
各杠杆长度:Lab、Lbc、Lcd、Ldo2、Lko1、Lw1o2、Llo1。
结构角度:手柄LO1与垂直方向(Y轴)夹角BTA;触头支架DO2与X轴负方向夹角GMA。
弹簧原长L,刚度K=Gd4/(8D32n),G剪切弹性模量,中径D2,簧丝直径d,有效工作圈数n。
通过受力分析,可以进行合闸力计算,计算出开闸力、脱扣力、再扣操作力等相关力和力矩。最终,在开距、超程、触头压力确定后,初步确定机构各杆件的长度和位置尺寸:Lab=21 mm、Lbc=19.5 mm、Lcd=15 mm、Lo2a=18 mm。
3 塑壳断路器的三维建模
3.1 断路器零部件绘制
塑壳断路器动触头支架的实体模型如图7所示,可以通过Pro/E的建模命令完成绘制。
3.2 断路器关键部件应力分析
采用Pro/E软件,可以对塑壳断路器的各个部件进行应力分析。本文以断路器脱扣器的一个面的反射命令为例,展示其应力的空间分布,如图8所示。如果显示的条纹间隔较为均匀且没有突然的跳动,说明不存在应力集中问题。否则,如果存在应力集中的问题,就必须结合设计要求,在不影响产品性能的前提下对零件参数进行动态调整。

图8 动触头支架实体模型图
3.3 塑壳断路器Pro/E动态仿真
3.3.1 断路器的装配和分解
Pro/E为我们提供了装配和分解,所有零件装配起来了如图9所示。装配图可以给人直观的产品效果,可以更好地发现装配时各个零件的安装关系。

图9 条纹状应力空间分布分析图
3.3.2 操作机构动作过程仿真、分析及应用
动作过程仿真:三维模型的动态仿真能让设计者看清操作机构的整体运动状态,各零件间的相互运动关系,是否有干涉,而Pro/E的测量分析为产品提供了良好的性能验证途径。
首先,生产分析的测量结果,弹出测量结果对话框。其次,创建测量目标,系统提供了速度、加速度、冲力、冲量等一系列相关测量目标。最后,获得分析测量结果,如图10所示。
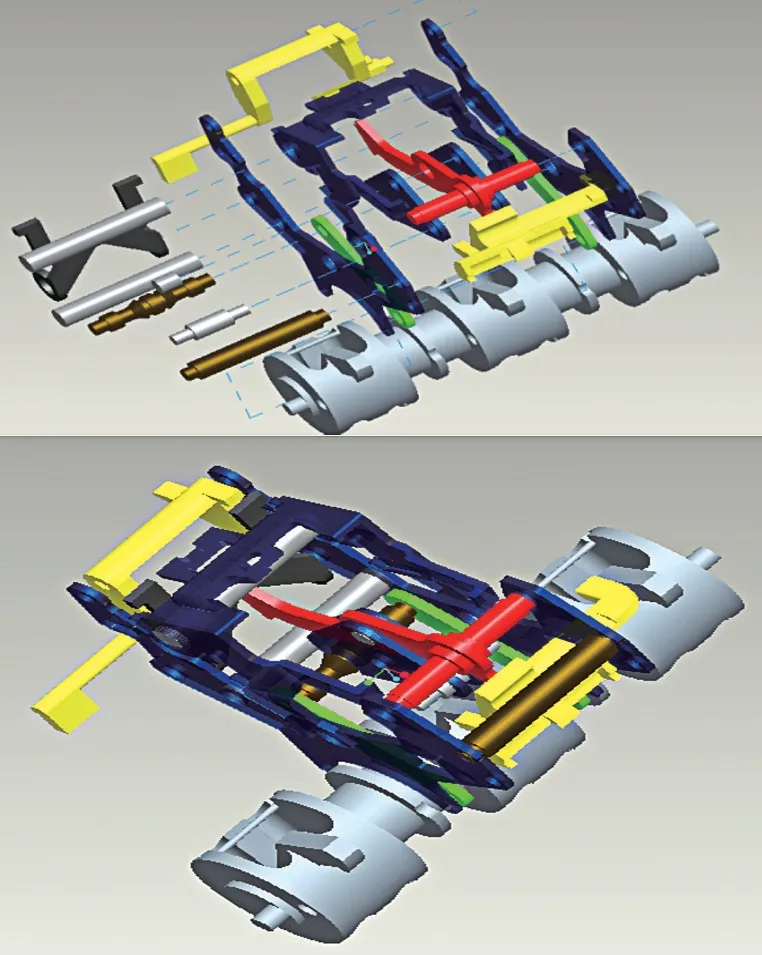
图10 模型分解与装配
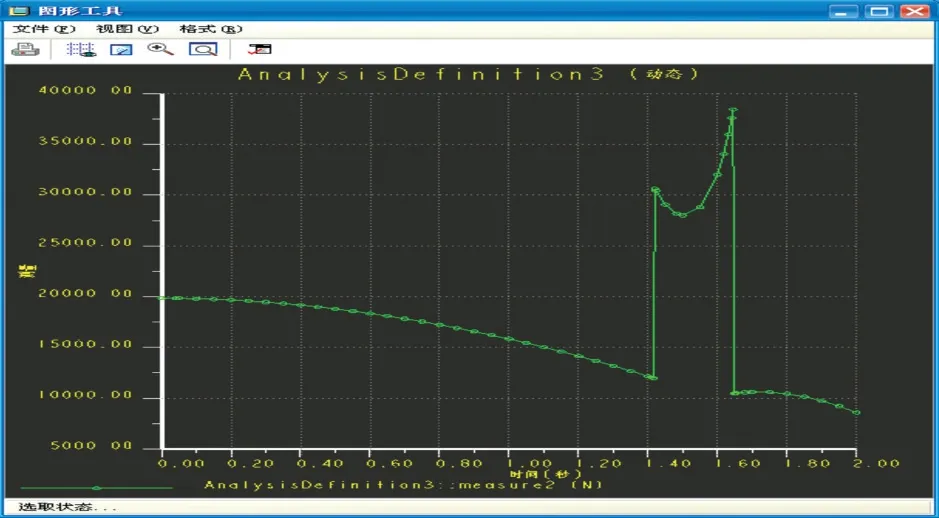
图11 分析测量结果图
仿真结果分析及应用:由图10可知,曲线表示摇臂和跳扣之间的相互作用力,是在塑壳断路器合闸的过程中测得的。由测量结果可以获得下列参数变化规律和设计成果:
由于弹簧一开始处于拉伸状态,随着摇臂的转动弹簧长度开始缩短,弹簧力开始逐渐减小;
在t=1.4 s时,相互作用力急剧上升,其原因是跳扣处存在一个曲率较大的圆弧。当圆弧曲率越大时,相互作用力就越大;相互作用力越大,所需要的合闸力也就越大。
根据上述仿真过程及结果,通过动态调整跳扣中曲率较大圆弧的曲率大小,并调整合闸力的大小,对低压塑壳断路器的跳扣进行优化设计。经实测和工程验证,所设计跳扣能在合闸力作用下平顺、可靠地被锁扣锁住,确保低压供用电系统中塑壳断路器的灵敏可靠动作。
4 结束语
塑壳断路器的操作机构是实现其功能和性能的关键。本文利用计算机辅助设计专业软件和仿真工具开展塑壳断路器的优化设计,主要工作与结论如下:
低压塑壳断路器的工作原理及动作过程须要根据新型配电网建设和发展的实际不断进行更新;
采用Pro/E专业软件,可以有效进行断路器的三维建模、尺寸优化和动作机构应力分析;
再进行计算机三维动态建模和仿真之前,须要预先建立断路器操作机构及关键零件的几何关系和受力分析数学模型;
通过运动过程的动态仿真,可以获得操作机构及零件的最优尺寸、结构关系和整体运动特性,进而对跳扣装置进行优化设计,保证低压塑壳断路器的灵敏和可靠动作;
计算机辅助设计和仿真,可以取代常规的样机制作和物理实验验证,显著减少设计周期、提高设计效率、并节省大量人力、物力和财力。