铀矿无线深度-拉力测井滑轮的设计及应用
2022-11-21王家跃
王家跃
(核工业二九〇研究所,广东 韶关 512029)
测井,也叫地球物理测井,是利用岩层的电化学特性、导电特性、声学特性、放射性等地球物理特性,测量地球物理参数的方法。在铀矿地质勘查中,测井是非常重要的工作之一,钻探施工结束后,开展钻孔γ 测井、井斜测井等工作,并通过资料的定量解释,可准确确定不同品级铀矿层的厚度、品位和埋深,为铀矿资源量估算提供准确可靠的数据支撑[1-7]。
我国硬岩型铀矿主要分布于江西、湖南、广东和广西等南方地区,工作区基本处在偏远山区,雨水充沛,植被茂密,地形复杂,钻探施工和测井作业等工作环境条件非常差,一般情况下都是采用75 mm 及以下小口径钻探工艺,测井作业也只能使用便携式测井仪器设备。
目前国内常见的便携式测井仪器设备,基本上未配备电缆拉力(或张力)监测和自动控制等功能,为了确保测井作业的安全,作业过程中需要技术人员时刻值守,频繁手动操作控制器,调整测井绞车运转状态等,这带给作业人员较大的工作强度和心理压力,不利于工作效率和质量的提升,且存在一定的安全风险。
为了促进铀矿测井工作的机械化、自动化发展,减少劳动用工,降低技术人员劳动强度,提升测井工作质量和效率,提高测井作业本质安全度,在南方硬岩型铀矿区开展自动化测井技术及装备研究,设计并研制了一种无线深度-拉力测井滑轮。
1 系统装置设计
1.1 整体设计
无线深度-拉力测井滑轮是自动化测井系统装置的一个关键模块(图1),整合了光脉冲编码器、拉力传感器和WIFI 通信模块等在测井天滑轮上,使其集测井深度测量、电缆拉力监测和测井天滑轮等多种功能为一体。

图1 自动化测井系统功能模块交互示意图Fig.1 Interaction diagram of function modules of the automatic logging system
在测井作业过程中,无线深度-拉力测井滑轮首先作为测井天滑轮使用,用于改变测井电缆运行方向,其次是进行测井电缆拉力和测井深度信息的采集,并通过无线通信方式及时把准确的测井深度值和电缆拉力值等参数实时传输至自动化测井控制器端,为自动化测井作业提供关键参数。
1.2 无线深度-拉力测井滑轮设计
为了提高便携性,目前国内轻便型测井电缆绞车基本未配备拉力(或张力)测量装置,部分厂商中大型测井绞车可选配张力测量轮,测井深度测量装置一般采用马丁代克测量轮,通常是与测井绞车整合在一起,且采用有线方式连接测井仪,结构复杂设备笨重,图2为某测井仪器厂商目前主流的测井绞车深度(张力)测量装置实物图,图2a为便携式测井绞车深度测量装置,其无电缆张力(拉力)测量功能;图2b为中大型测井绞车深度张力测量装置。

图2 某测井绞车深度(张力)测量装置实物图Fig.2 Photos of depth(tension)measuring device of a certain well logging winch
无线深度-拉力测井滑轮设计采用了如图3 所示的设计思路,其将光脉冲传感器、拉力传感器和WIFI 通信模块等整合在测井天滑轮上,使其集测井深度测量、电缆拉力监测和测井天滑轮等多功能为一体,增加电缆拉力监测和无线通信功能的同时,装置也更加小巧轻便。
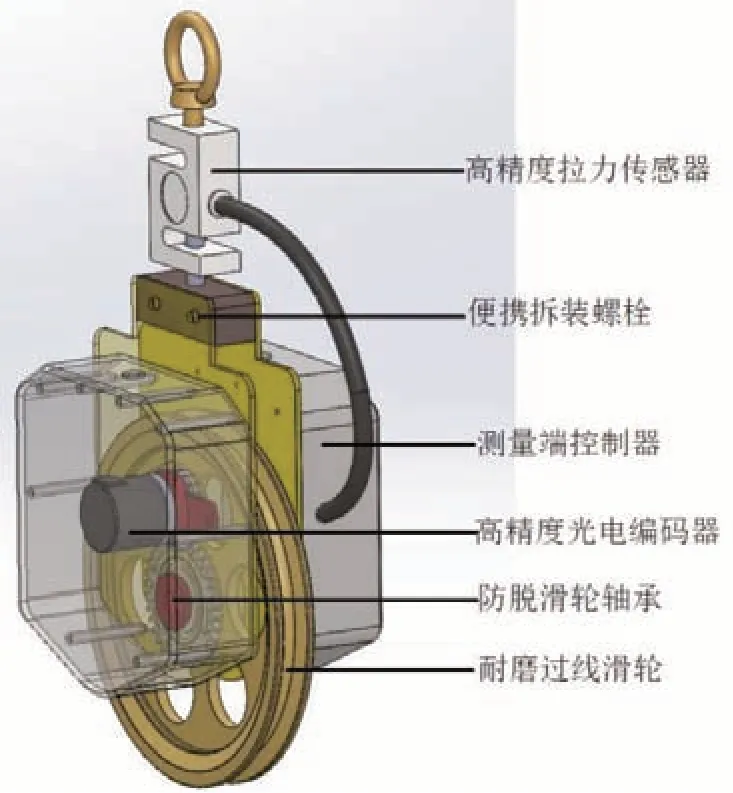
图3 无线深度-拉力测井滑轮结构设计图Fig.3 Design drawing of wireless depth-tension logging pulley
1.3 主要核心部件
1.3.1光电编码器
光电编码器采用PENON EB38B 轴套型编码器,分辨率为5 000 PPR,可抗击50 G/11 ms的冲击,可在-20~80 ℃环境持续工作,拥有IP45 防护标准,具有小型化、轻量化和高精度化的特点,同时具备良好的抗机械损伤性能。
在测井作业过程中,测井电缆绕过过线滑轮(深度测量轮)下放至井内,下放或上提时,滑轮转动带动光电编码器旋转,产生互差90°的方波信号(AB 两路信号)。如图4 所示,当A相位超前时,表示深度轮正向运动;当B相位超前时,表示深度轮反向运动[8-9];光电编码器旋转产生的高低电平信号输入单片机后进行脉冲计数和相位的判断,进一步计算求取测井速度值和深度值等信息,后通过无线方式传输至自动化测井控制器段。
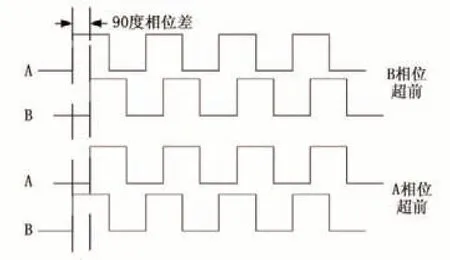
图4 光电编码器信号Fig.4 Photoelectric encoder signal
1.3.2拉力传感器
DYLY-103型拉力传感器量程为0~1 T,具有10 kHz的响应频率、输出灵敏度为2.0±10%mV/V、非线性度0.03%F.S.等优良性能,响应快、灵敏度高、线性良好、测量精度高。同时可适应-20~80 ℃工作环境,安全过载150%,极限过载200%,可用于所有测井环境,拥有极高安全性。
测井作业过程中,电缆拉力作用于拉力传感器上产生模量电信号,电信号放大整形后通过RS485 通信方式连接单片机,进行数据结构封装计算,后通过无线方式传输至自动化测井控制器段。
1.3.3无线通信模块
选用ATK-ESP8266 模块,其是ALIENTEK 推出的一款高性能的UART-WIFI(串口-无线)模块,ATK-ESP8266 板载了ALIENTEK 公司自主开发的ATK-ESP-01 模块,该模块支持IEEE 802.11b(最高可达11 Mbps)、IEEE 802.11g(最高可达54 Mbps)、IEEE 802.11n(最高可达HT20,MCS7),其频率范围在2.412~2.484 GHz,发射功率为11~18 dbm,同时可在-40℃~85℃、10%~90%RH 的工作环境持续工作。ATK-ESP8266 模块支持LVTTL 串口,兼容3.3 V 和5 V 单片机系统,拓展性强。模块支持串口转WIFI STA、串口转AP和WIFT STA+WIFI AP 的模式,从而快速构建串口-WIFI 数据传输方案。ATK-ESP8266 板载了ALIENTEK公司自主开发的ATK-ESP-01模块,该模块通过FCC,CE 认证,可靠性与稳定性高。
1.3.4单片机芯片
单片机芯片选用STM32F103ZET6单片机,其具有72 MHz的CPU、1 Mb的闪存、96 kb的SRAM、2 位的RISC、8个定时器(3个16 位定时器,每个定时器有多达4 个用于输入捕获/输出比较/PWM 或脉冲计数的通道和增量编码器输入的接口)、3 个USART接口(支持ISO7816接口,LIN,IrDA接口和调制解调控制)和适应-40~105 ℃工作温度,并包含电动机控制外围设备以及CAN和USB全速接口。STM32系列ARMCortex-M3 32位闪存微控制器工作时具有低功率、低电压,并具有极佳的性能。
1.3.5电源系统
该装置采用松下21700动力版电池组供电,为4 900 mAh 单个组合6串带保,电压22.2~25 V,最大放电14~16 A,尺寸为50 mm×64 mm×72 mm。
2 系统装置标定
为了确保系统装置拉力测量和深度测量的准确性,以及自动化智能控制的精准性,系统装置投入使用前须进行标定,校准其电缆拉力和深度测量值,尤其是深度测量值的校准,其精准性直接影响到测井质量的高低。
2.1 拉力测量系统标定
电缆拉力测量系统标定,实质是对拉力传感器示值的标定,一般采用悬挂标准砝码法进行标定。首先自然悬挂无线深度-测井滑轮,电缆绕过过线滑轮自然悬挂,初始化拉力传感器(拉力清零)后在电缆另一端悬挂标准质量砝码,静态下读取系统测量值。如表1 为某系统装置拉力测量系统标定原始数据,通过线性拟合获得标定方程为y=1.0058x+0.0091(R2=0.998 3)。
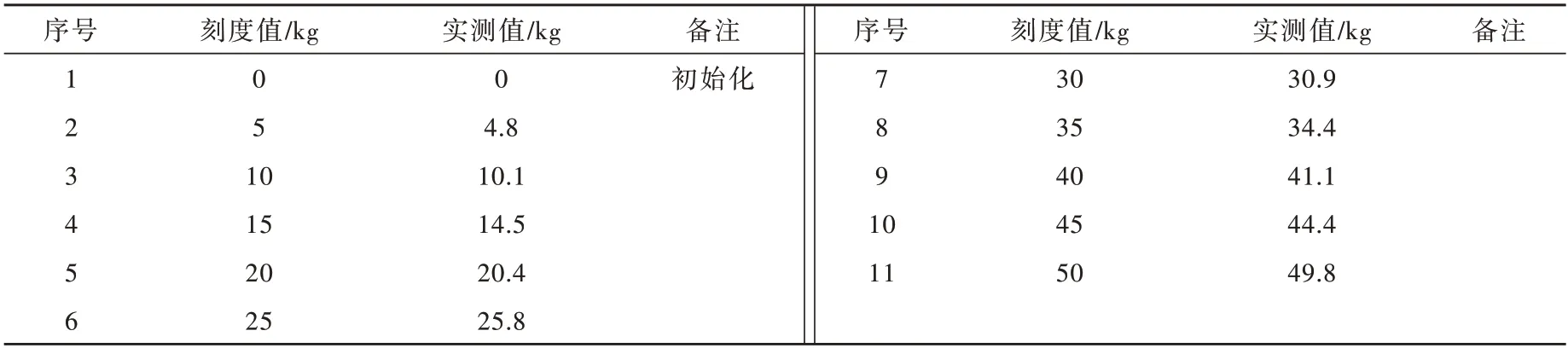
表1 电缆拉力测量系统标定原始数据表Table 1 Original data sheet of cable tension measurement system calibration
2.2 测井深度测量系统标定
该系统装置引入一个深度测量轮参数KM,定义为每米脉冲数,其通常与电缆直径、过线滑轮(深度测量轮)直径和光电编码器精度等相关,在实际运用中,为了消除电缆、深度测量轮等长期使用磨损或油泥污染,以及电缆在运动过程中因受到拉力作用从而导致电缆发生拉伸形变等因素对测量结果的影响,须定期进行检查校准[8-9]。
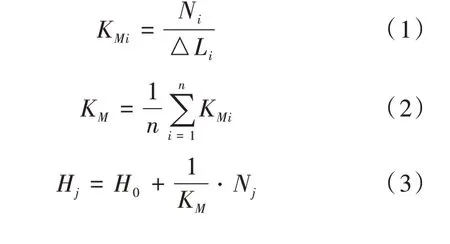
本次采用光栅尺校正法求取KM值[9],以上海地学仪器研究所生产的DJ 系列四芯电缆(φ4.70 mm)为例进行标定;光栅尺选择量程1 000 mm,精度1 μm,分辨率0.1 μm,标定时电缆与光栅尺测量头连接,电缆一端悬挂一定质量标准砝码,缓慢拉动电缆移动一定距离,通过软件读取产生的脉冲数Ni,再读取光栅尺测量数值ΔLi,按照公式(1)即可计算KMi值;重复n 次后按照公式(2)求取均值,标定原始数据见表2,均值取整后得出标定参数KM值为7 775 脉冲/m,求导得出测量精度为0.013%。

表2 测井深度测量系统标定原始数据表Table 2 Original data sheet of logging depth measurement system calibration
深度轮参数KM确定后,在实际测井作业过程中,某一时刻(j)的测井深度值Hj按公式(3)求取,其中H0为初始深度值,Nj为j时刻产生的总光脉冲计数。
3 应用测试
无线深度-拉力测井滑轮在诸广地区铀矿勘查项目实际测井作业中进行了多次的应用测试,先后优选了5个钻孔,成功完成了10次测试,其中下放测井测试和上提测井测试各5次。应用测试过程中,为了确保测井数据采集质量不受影响,测试时均采用了双深度测量系统测试,即测井数据采集使用的是测井绞车自带的深度测量系统(1#轮),测井电缆拉力监测及自动控制深度测量采用新设计研制的无线深度-拉力测井滑轮(2#轮),两者串联独立使用,电缆下放测井或上提测井时,均可同时带动两套深度测量轮转动产生光电信号,独立完成深度测量;测试情况统计表见表3。
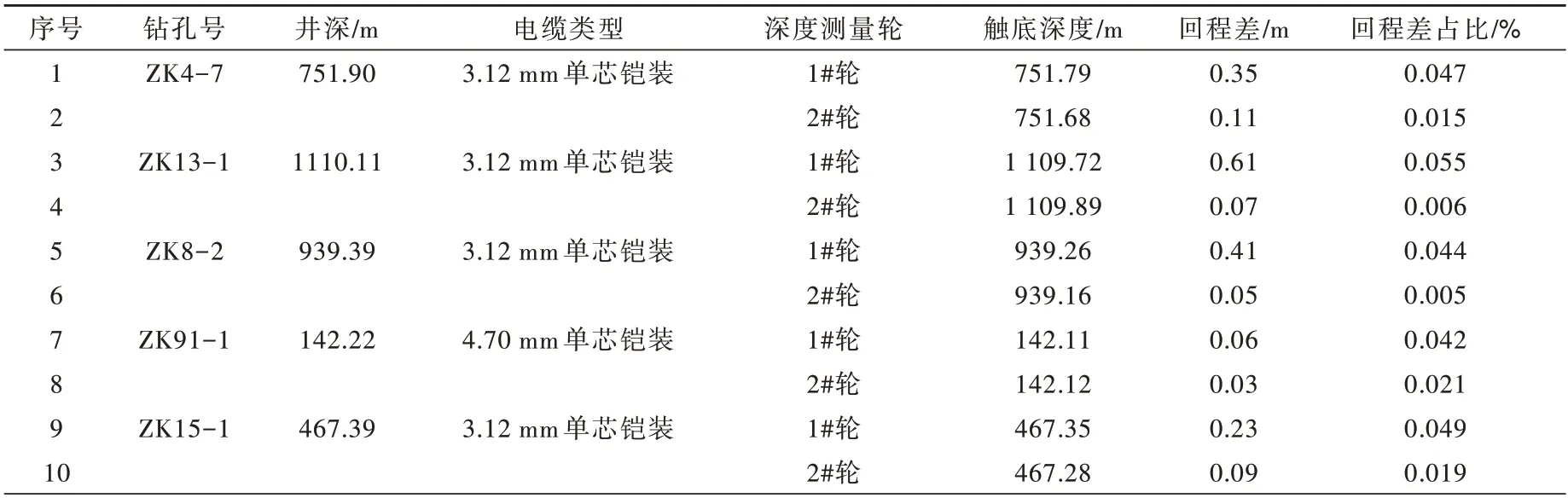
表3 应用测试情况统计表Table 3 Statistics of application test parameters
测试成果显示,无线深度-拉力测井滑轮(2#轮)回程差指标明显优于1#轮,且与井深基本无相关性;1#轮回程差指标总体随井深增加而增大,占比均值为0.047%。分析研究发现在上提测井过程中,当排线至储线轮边转向时电缆会出现抖动,此时电缆线与测量轮之间会出现微小的滑动,从而造成测量误差,随着井深增加,抖动次数成正比例增加,误差累积造成回程差增大。
4 结论
无线深度-拉力测井滑轮创新性将光脉冲编码器、拉力传感器和WIFI通信模块等集成在测井天滑轮上,使其集测井深度测量、电缆拉力监测和测井天滑轮等多功能为一体,相比传统深度、张力测量装置,性能和功能得到提升和优化改进的同时,体积和质量更加小巧轻便,具体如下:
1)采用了先进的WIFI 无线通信方式,测井作业过程中可实时把测井深度值、速度值和电缆拉力值实时传输至控制器端,为自动化测井控制提供可靠的重要参数。
2)把传统的测井电缆张力测量方式改成了更加直接有效的拉力测量方式,便于更加精准掌握测井电缆拉力值,防止测井作业过程中过载造成安全事故。
3)深度测量轮也进行了质的优化改进,在省去压紧轮情况下,保持了更高的深度测量可靠性,应用测试成果显示,测井电缆与深度测量轮之间基本无打滑现象出现,测井回程差数值明显好于传统模式。
4)在深度测量系统标定中,首次引进使用了“光栅尺标定法”,相比传统的“钢卷尺丈量法”,其更加精准科学。
