智能隧道检测车的现状及改进策略
2022-11-21黄丹樱朱椰毅林浩立
黄丹樱,韦 强,朱椰毅,范 骁,林浩立
(1.浙江师范大学工学院,浙江金华 321004;2.浙江金温铁道开发有限公司,浙江温州 325000)
1 引言
随着国家“城镇化”“一带一路”和“交通强国”三大战略的推进,越来越多的隧道投入交通运营中。根据2021年交通运输行业发展统计公报,截至2021年底,我国公路隧道数量为23 268座,总长度约24 698.9 km,铁路隧道数量为17 532座,总长度约21 055 km,城市轨道交通运营里程达8 939 km,其中地下线6 257.3 km(约占城市轨道交通线路总长度的70%),在此背景下隧道数量及长度在近10年呈逐年增长趋势。
铁路隧道病害的原因涉及到环境、设计、施工、运营维护等多个方面。在隧道建设过程中由于施工缺陷会导致病害产生,如拱墙背后空洞、衬砌厚度不足等。实际运营期间,在荷载作用下会产生其他严重病害,如衬砌渗漏水、开裂、掉块,隧底裂损、下沉与翻浆冒泥、上拱、排水系统冻害等。这些病害会恶化隧道服役性能,降低隧道结构的安全可靠度,威胁线路行车安全。因此,隧道检测、监测已经成为建设之后的重要任务。
传统的隧道检测方式大都是人工手持检测仪进行检测,因此在检测过程中会受到环境限制,导致产生许多问题,主要体现在以下3个方面:
(1)隧道内部照明不足,仅靠车灯照明会对检测人员的视线造成较大影响,使检测数据误差过大;
(2)隧道内壁表面情况复杂,会对检测信号产生影响,极易对设备造成损坏或使检测人员处在危险中;
(3)在面对长隧道或隧道群的情况下,需要长时间交通管制,影响道路正常行驶。
近年来,人工检测已经不能满足当前的社会发展需求,渐渐被人工智能所取代。因此隧道检测技术将从有损、接触式、单一检测向无损、非接触式、智能化检测发展。除此之外,随着隧道检测设备集成度的提高,面对成倍增加的隧道病害数据,人工智能、计算机网络、大数据以及机器视觉等新兴技术可对数据进行自动识别、快速处理和有效反馈,并结合统计分析、机器学习等方法从大量隧道病害数据中预测出可能发生的风险。不仅如此,未来还将有更多检测技术应用到隧道检测车上,实现高效且综合的检测。
对此,本文首先分析当前国内外隧道检测技术的发展概况,探讨轨道交通隧道检测设备的不足;其次,阐述应用隧道检测的新技术,如基于移动雷达技术的雷达数据处理分析软件系统和基于机器视觉的光学成像、激光测距系统,以求弥补目前检测设备的不足之处;最后,预测隧道检测车的市场规模,以期为隧道检测行业的发展提供参考。
2 国内外隧道检测技术发展概况
2.1 国内外同类技术研究现状
进入21世纪之后公路隧道检测技术快速发展,伴随着电荷耦合装置(CCD)的出现,计算机能够实时对检测到的图像信息进行存储和处理,该方法在提升隧道病害检测效率的同时也增加了硬件成本,使得检测车的价格居高不下。
2014年,日本三菱电机会社推出公路隧道检测车MIMM-R,其检测系统由移动图像采集系统(MIS)和移动地图构建系统(MMS)构成。车辆能以50 km/h的速度进行检测,且在检测过程中不影响道路的正常行驶。
对于铁路隧道检测技术的运用,国外普遍采用地质雷达法来检测运营隧道的衬砌质量,但装载地质雷达的快速移动车辆平台并不多见。为检查日本新干线隧道的健全性,JR东日本开发了地质雷达隧道检测车,如图1所示,其检测速度为3.5 km/h。

图1 JR东日本地质雷达隧道检测车
目前,我国针对铁路隧道病害的检测大多依赖人工,这种靠肉眼观测和借助工具测量的方法,无法保证检测结果的可靠性,也远远不能满足现代化隧道质量检测的需求,这将导致大部分的隧道衬砌病害无法被检测到。国内某公司推出铁路隧道智能三维激光视频检测系统,该系统集成高精度激光扫描仪、高清隧道相机、激光惯导/里程计组合定位定姿系统、多传感器同步控制单元、嵌入式计算机以及电源供电系统等设备,搭载轨道电动平台,如图2所示。该系统可对隧道衬砌掉块、细微裂缝、渗水、侵限等指标进行智能化检测分析,最高每小时采集15 km隧道数据。

图2 铁路隧道智能三维激光视频检测系统
2.2 国内外隧道检测系统的技术对比
随着地质雷达、激光测距、机器视觉等技术的发展,国内外主要隧道检测系统大都运用了上述技术,采用情况如表1所示。

表1 隧道检测设备技术对比
由于受固定雷达技术的限制,各检测系统检测速度大都较慢,虽然可以检测到隧道裂缝、渗漏水、形变等基本病害,但检测覆盖面仍不够广。
2.3 隧道病害检测存在的主要问题
我国隧道检测技术起步较晚,而在铁路检测方面还处在传统人工检测阶段,且隧道检测车在公路隧道检测方面也只有少量应用,与国外相比较为落后。
目前,国内隧道检测车存在以下几方面的不足:
(1)只检测隧道内壁表面,无法检测衬砌内裂缝的深度、钢筋缺少、空洞等病害;
(2)无法检测轨下路基病害;
(3)移动速度慢(铁路隧道检测车)。
同样,在国内隧道检测技术应用方面,也存在一些不足,主要表现在以下几个方面:
(1)缺少快速检测且能将检测反馈信息较好融合的设备,数据来源以及每个指标的信息链不够丰富;
(2)检测、监测成套技术尚未形成体系,没有建立数据采集、分析、预测、评估、预警等功能的集成化平台;
(3)缺少危害预警等级分类,没有对重点检测、周期检测和日常检测项目进行区分;
(4)检测效率低,检测手段不规范;
(5)制度不完善,没有统一技术标准。
3 智能隧道检测车
为提高检测效率及检测水平,智能隧道检测车应涵盖移动雷达技术和基于机器视觉的光学成像、激光测距系统,并需达到以下技术指标。
(1)自动检测:可对隧道进行连续扫描,并在线实时记录扫描数据,实现数据采集的自动化、智能化。
(2)精度要求:数码图像清晰度不低于1 080 p,衬砌厚度误差10%以内,漏水水源误差20%以内,裂缝精度0.2 mm以下,变形精度0.2 mm,定位精度0.5‰。
(3)移动速度:为不影响隧道运营和轨道交通隧道检测的速度与准确性以及满足车辆长途运行的需求,智能隧道检测车检测速度需达60~100 km/h。
(4)探测深度:探测轨底3 m内以及隧道衬砌2.5 m内的病害情况,可以有效探测到衬砌内的裂缝、空洞以及渗漏水等状态。
3.1 移动雷达系统
移动雷达系统是由以探地雷达基本原理为前提、结合八通道时序控制电路形成的八通道探地雷达系统,选用具有良好时域脉冲辐射特性的典型超宽带天线的隧道衬砌超宽带雷达系统,以及基于Windows 10平台的探地雷达数据采集、处理分析软件系统组成。
3.1.1 探地雷达基本原理
探地雷达发射系统的脉冲源通过发射天线发射超宽带脉冲信号,信号以电磁波形式在路基介质结构层中传播时发生反射,反射回来的电磁波由接收天线接收。
反射波经过不同路基介质传播,脉冲信号幅度出现不同程度的衰减,其中包含大量的路基剖面的结构信息。当连续测量时,可以得到一幅连续的路基剖面探地雷达图。本次采用的探地雷达工作原理如图3所示,时序控制电路模块控制着脉冲源模块的触发、步进采样模块和模拟数字转换器(ADC)模块之间的同步,每路单通道系统产生的4路信号中,2路信号用来触发脉冲源和采样头模块,另外2路信号作为采集卡的同步和触发信号。
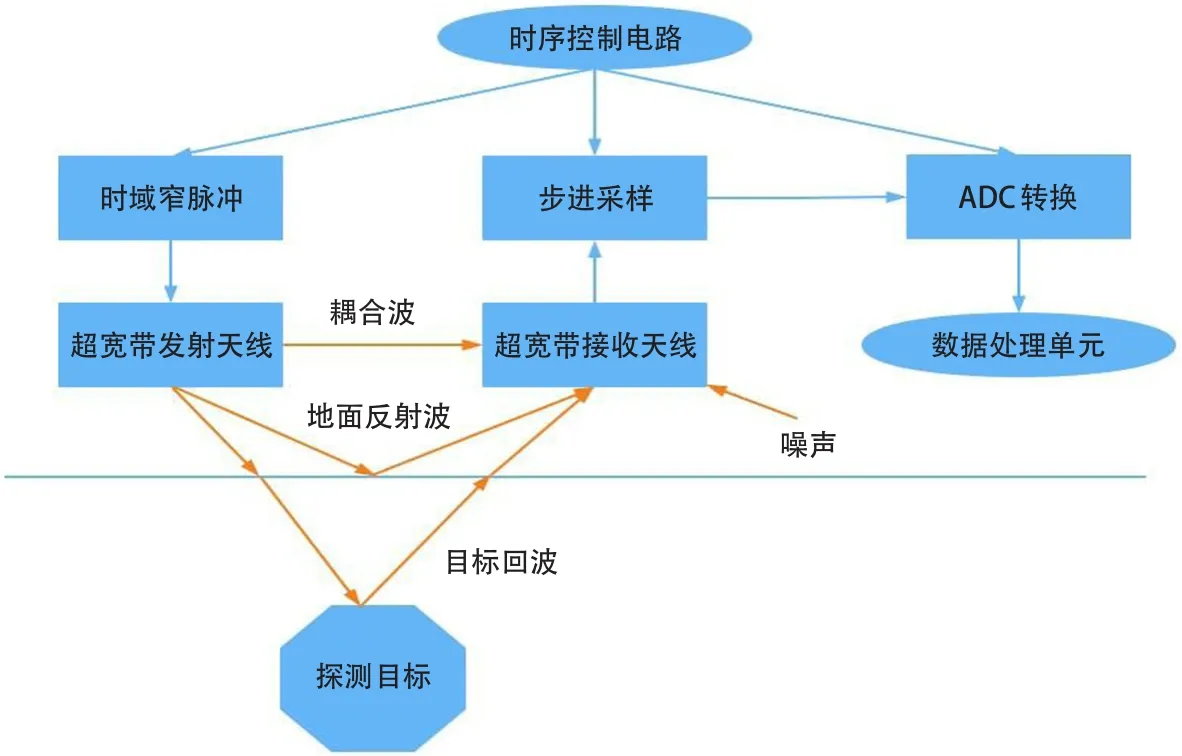
图3 脉冲式探地雷达系统原理图
3.1.2 八通道探地雷达系统
探地雷达系统主要由时序控制电路模块、脉冲源模块、发射天线与接收天线、采样模块与ADC转换模块以及数据处理单元构成。多通道探地雷达与单通道探地雷达的区别在于前者具有多组相关的时序控制电路、脉冲源模块和收发天线等,形成多个输入、输出通道。选用多通道探测可以提升探测精度和快速跟踪性能。
基于探地雷达的基本工作原理以及目前探地雷达系统中主流的超宽带信号采样方法,本文结合八通道时序控制电路在等效采集系统中的作用,画出八通道探地雷达系统框图,如图4所示。
图4中主控单元是1个八通道的时序控制电路板。单通道的探地雷达信号采集系统主要包括3个部分,即八通道的时序控制电路、信号采样模块以及恢复信号输出模块。
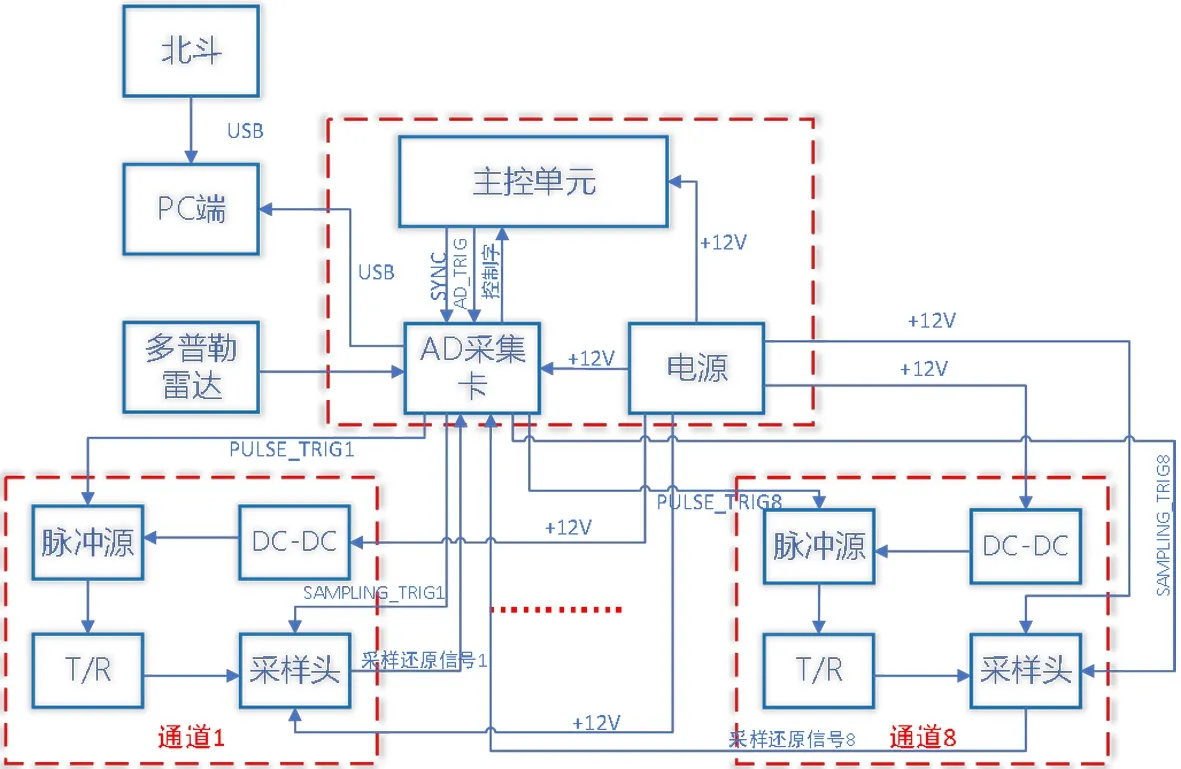
图4 八通道探地雷达系统框图
当每个单通道系统工作时,由八通道的时序控制电路模块产生4路有严格时序的触发信号,分别是同步信号(SYNC)、AD触发信号(AD_TRIG)、采样触发信号(SAMPLING_TRIG)和脉冲触发信号(PLUSE_TRIG)。其中PLUSE_TRIG作为脉冲源的触发信号,脉冲源产生的窄脉冲输出信号作为发射天线和接收天线(T/R)的激励信号输入到天线中,地层探测输出的信号经过接收天线输入到采样头模块,采样还原后的信号再输入到数据(AD)采集卡中,AD采集卡在 SYNC和AD_TRIG作用下将采样头传来的采样还原信号从模拟信号转为数字信号。
整个多通道探地雷达项目系统重要组成模块的功能如下。
(1)时序控制电路。对于每路单通道系统产生4路周期方波信号,其中2路分别用来触发脉冲源和采样头模块,另外2路信号作为采集卡的同步和触发信号。
(2)脉冲源电路。基于阶跃恢复二极管脉冲产生技术与非线性传输线脉冲前沿加速方法,产生ns量级前沿脉冲信号,作为探地雷达天线的激励信号。
(3)超宽带天线。超宽带天线主要可以分为4种类型,分别为空间互补结构天线、多模谐振天线、渐变结构天线、加载天线,但不论哪种形式的天线 ,遵循的第一设计原则都是宽频带。
3.1.3 隧道衬砌超宽带雷达
在探地雷达工作系统中,天线作为关键组成部分,负责电磁波的有效辐射和接收。超宽带天线一般在200 MHz、400 MHz、900 MHz频段中,不同的天线频率对应的测量深度以及分辨率不同,从而使得系统能够适用于不同的工作环境。基于对系统工作性能的实际需求,探地雷达天线的设计要求主要有以下几点:
(1)由于源信号是超宽带的窄脉冲信号,天线的频带要和源匹配,探地雷达天线应该是超宽带天线;
(2)除频域辐射性能以外,探地雷达天线还应该具有良好的时域脉冲辐射特性;
(3)为保证系统的整体性,探地雷达天线应该具有简单、轻便、易集成的结构。
基于以上分析,在探地雷达系统中应该选用具有良好时域脉冲辐射特性的典型超宽带天线,理论上可以传输保型性好、拖尾小的时域脉冲信号。但在实际的设计过程中,要考虑天线耦合馈电部分的阻抗匹配特性、天线工作频段与源信号的匹配关系、天线结构末端引起的反射等因素,这些都会对天线的时域特性造成影响。
对200 MHz天线在CST仿真软件的环境下进行测试。回波损耗是传输线端口的反射波功率与入射波功率之比,一般用其反映天线的匹配特性,以对数形式的绝对值来表示,单位是dB。天线增益则是用来衡量天线朝一个特定方向收发信号的能力。200 MHz天线的回波损耗如图5所示,工作频带覆盖180~640 MHz,相对带宽255%,符合超宽带的要求,该天线的增益如图6所示,在工作频带内,主辐射方向的增益从1.8 dB逐渐提升至 6 dB。
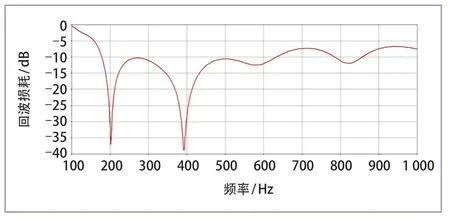
图5 200 MHz时域脉冲辐射天线回波损耗曲线图
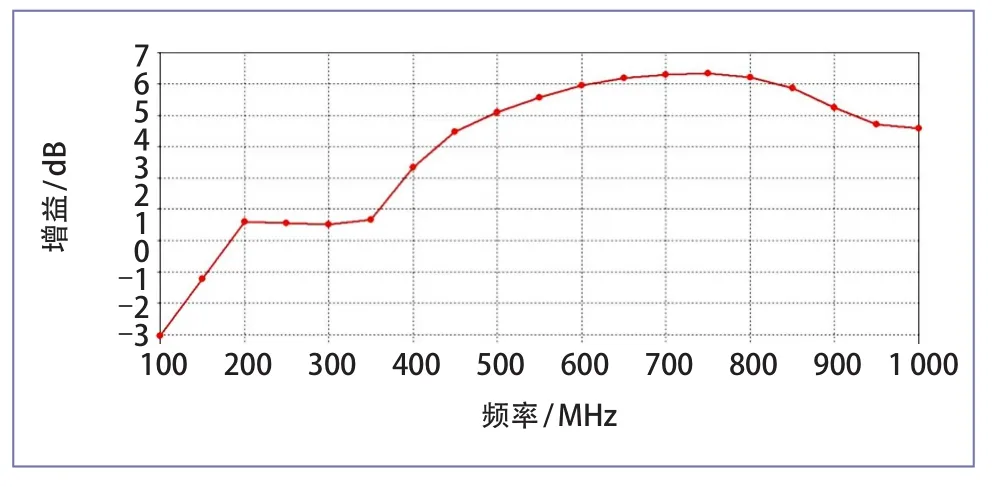
图6 200 MHz时域脉冲辐射天线主辐射方向增益随频率变化曲线图
天线具有超宽带的辐射性能,在工作频带内增益高,前后比大,方向性好。时域测试结果同样表明该天线具有拖尾短、震荡低的优点,可以运用到隧道衬砌超宽带雷达收发子系统的开发中。
3.1.4 探地雷达数据采集、处理分析软件系统
该软件系统在一定程度上建立集数据采集、预测、分析、预警等功能为一体的集成化平台,解决数据链单一,反馈信息融合性差等问题。
探地雷达数据采集软件基于Windows10平台。该软件应具有雷达数据八通道实时采集、存储、显示及数据回放功能,实现每秒1 000次的异步输入 / 输出(I / O),满足探地雷达系统数据采集的需求。
探地雷达数据分析处理软件基于Windows10平台,采用C#编程语言,编译环境为visual studio 2019,支持Microsoft Excel文件导出。如图7、图8所示,该软件具有去零偏、自适应去背景、滤波、信号放大、希尔伯特变换、预测反褶积、频率增益、偏移处理等算法,且可以实现不同算法之间的处理结果对比。
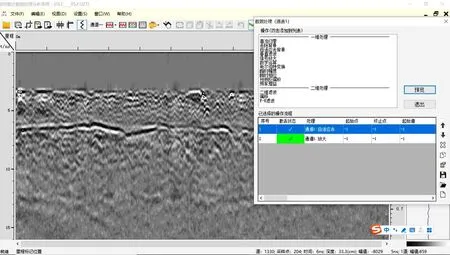
图7 放大+去背景处理结果

图8 放大+去背景+算术运算处理结果
3.2 图像检测系统
目前光学成像、激光测距系统相对成熟,国内企业、机构均有应用。综合国内外隧道检测车的特点,基于机器视觉的隧道衬砌裂缝自动图像检测系统应具有如下功能:自动图像采集;自动对焦;自适应照明;自适应路面起伏;图像阵列自适应隧道拱顶弧度;自动标定;自动定位图像位置;自动图像处理;自动图像分析,测算裂缝参数;利用AI技术和大数据技术,对各种形态的裂缝进行分类、分析,预测未来的可能灾害。
4 经济和社会效益评估
4.1 经济效益
智能隧道检测车可以填补目前包括公路隧道、铁路隧道、城市轨道交通隧道、军事用途山体隧道等检测市场的空缺。且当前检测车市场需求巨大,前景广阔,以每座隧道检测周期为1年计,经济效益相当可观,如表2所示。
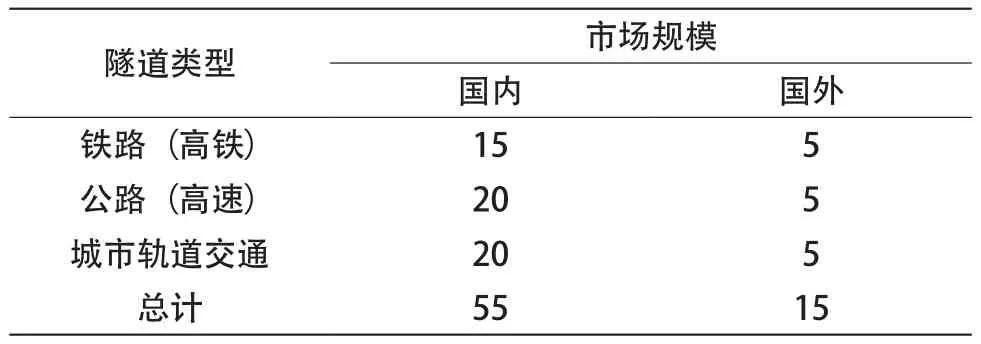
表2 隧道市场规模测算表 亿元
4.2 社会效益
智能隧道检测车的社会效益主要体现在以下几个方面。
(1)提升行业科技水平、管理水平,推动行业发展。通过技术升级,提高隧道检测水平,保证检测的深度和质量;推动隧道管理从被动维修转变为主动预防,从事后应急转变为事前处治;将隐患消灭在萌芽状态,减少隧道突发事件的发生。
(2)改变目前隧道检测的现状。智能隧道检测车采用多项新技术,从根本上改进以往隧道检测的落后技术手段,节约大量检测成本,最大限度降低对交通的影响;保证检测人员的人身安全,降低检测人员的劳动强度;为养护管理提供直接的数据和依据,极大提高检测的精度和工作效率,为研究分析病害变化提供便利。
(3)引领产业升级,发挥辐射带动作用,对隧道检测设备的升级换代具有极强的示范效应。
5 结论
综上所述,针对目前隧道检测技术的不足,本文提出运用移动雷达技术和基于机器视觉的光学成像系统的解决方案。基于该检测系统的智能隧道检测车适用于隧道的各种复杂检测环境,且在提升检测性能的同时不增加建设成本,明确隧道检测应以智能化、信息化为新技术的导向来满足当前的市场需求。
