一种车牌字符定位分割算法研究
2022-11-21彭春富胡常乐
钟 彩,彭春富,傅 波,胡常乐
(常德职业技术学院,湖南 常德 415000)
0 引言
步入信息化社会以来,计算机等现代化技术迅猛发展,促进了信息自动化处理能力及水平的提升,逐渐和人们生产生活的各个领域相融合。为更好地满足国民经济快速发展的需求,高速公路、城市道路建设数目及规模均有扩增,交通管理部门急需建设运行高效、智能化的交管系统。车牌信息是交通系统内一项重要的交通检测数据,在车辆自动化管理方面发挥重要作用。
由于夜间能见度显著降低,即便是进行灯光补偿,也很难获得对比度较高的图像,和日间获得的图像质量相差甚远。本课题提出了以支持向量机为基础的新型车牌定位方法,为了有效处理夜间车牌图像灰度分布不均的问题,尝试采用LBF模型分割夜间车牌字符[1]。
1 车牌识别的研究背景
在计算机、网络通信技术迅猛发展的背景下,信息自动化处理能力及水平持续提升,且广泛应用于人们生产生活领域。作为信息始源的自动化检测、图像辨识技术应用情况得到公众的高度重视[2],而在智能交通管理系统中,车牌识别(LPR)作为计算机视觉和模式识别技术结合运用的一个重要课题,也是交管智能化实现的重要基础。目前,LPR技术主要被用于以下领域。
(1)车辆定位。结合自动辨识出的车牌号,很容易发现被盗车辆,精准定位出道路上车辆的行车位置,防控、发现及追踪车辆盗窃的犯罪行为,在交通安全及城市治安实现方面起到保障作用。
(2)安全检查、路费上缴、运营管理方面,进行不停车检查。
(3)车辆并统计交通流指标参数,比如整体的服务流率、流入量与流出量、车流构成等。
(4)交通监控。利用智能交管系统的视频监控装置,能直接掌握有关路段的交通流情况,获得车辆密度、排队规律等交通信息,观察并防范交通事故[3-4]。
2 SVM模型简析
2.1 SVM分类器
SVM分类器是以统计学习理论为基础形成的一种分类方法,结合有限的样本信息量,在模型的复杂度与学习能力之间探寻出最佳折中,以期获得最好的推广能力。与常规的模式辨识法相比,在低样本容量、高维与非线性数据空间内,支持向量机方法能够在执行学习任务过程中有效应用多样化特征提供的信息,具备较强的推广能力。
2.2 SVM工作原理
SVM方法是由线性可分状况下,最优分类面提出的措施。
假定线性可分样本集是(xi,yi),其中:i=1,2,…,n;x∈Rd;y∈{+1,-1}。属于类别标号的范畴。d维空间中线性判别函数的普通形式:g(x)=w·x+b,可以采用下式表示分类方程:
w·x+b=0
(1)
对判别函数做归一化处理,使以上两类全部样本均符合|g(x)|≥1,此时距离分类面最近的样本|g(x)|=1,那么分类间隔就是2/‖w‖,所以间隔最大等价于‖w‖(或者‖w‖2)达到最低;且明确要求分类面对全部样本都能实现准确分类,要符合:
yi[(w·xi)+b]-1≥0,(i=1,2,…,n)
(2)
故而,符合以上条件要求并且能使‖w‖2达到最小的分类面便是最优分类面。以上两类样本内距离分类面最近的点位,且和最优分类面成180°角的超平面上的训练样本,即是使式(2)成立的样本,将其统称为支持向量。结合上述分析讨论,可以尝试利用如下的约束优化去表示最优分类面相关问题,等同于在式(2)的约束下,计算出式(3)的最小值。
(3)
这属于一个二次规划问题,可以将其定义成如下的拉格朗日函数:
(4)
在式(4)内,ai>0是Lagrange系数。计算式(3)的极小值,等同于针对w,b测求拉氏函数的极小值。计算出L对w与b的偏微分,且指定其等于0,可以顺利地把其转化成对偶问题。
(5)
[yi(w·x+b)-1]=0∀i
(6)
由此可见,当支持向量的系数ai不等于0时,代表仅有支持向量影响最后的划分结果。可以采用下式表示w:
(7)

(8)
式(8)内,sgn()是符号函数,b*代表的是分类的阈值。针对给出的未知样本x,仅需测算出sgn(w·x+b),就能顺利判断出x的所属分类。
3 基于SVM的车牌定位方法分析
车牌及非车牌区域图像的纹理特征有很大差别,可以采用纹理图像分类的方法定位车牌区域。
3.1 提取空间子块
一般应用灰度共生矩阵提取图像的纹理特征参数:
Lx={1,2,…,Nx} ,Ly={1,2,…,Ny}
G={1,2,…,N}
可以把图像看成是经过Lx×Ly至G的转换,也就是Lx×Ly各个点和G内的灰度相对应。定义灰度共生矩阵时,方向角是θ,间隔是d,采用[p(i,j,θ,d)]表示。
矩阵P(i,j)=p(i,j,θ,d)/R内的(i,j)对应的全部坐标,随后对GLCM进行归一化处理,R为归一化的常数。
基于灰度共生矩阵的常规处置过程,就能获得如下纹理特征。
(1)角次弯矩。
阐述图像灰度统一分布的属性,对于粗纹理而言该数值很大,而对于细纹理该值就极小。
(9)
(2)对比度。
用于阐述图像的清晰度,伴随纹理凹槽深度的增加,对比度数值就越大,图像的清晰度就越高。
(10)
(3)关联度。
用于权衡灰度共生矩阵行或列内元素之间的相似度。
(11)
式(11)中,μx与σx分别为{Px(i);i=1,2,…,Ng}的平均值和方差;μy与σy依次代表{Py(i);i=1,2,…,Ng}的平均值和方差。
(4)熵。
用于权衡图像信息量的大小,若图像内不存在任何纹理,该值接近0。
(12)
综合以上特征,不同的d与θ能获得不同的数值,一般设定d=1,θ分别取0°,45°,90°,135°,那么对于各个图像特征能够获得4个值。
3.2 提取DCT域特征
将全幅图像划分为N×N个像素块,并对各像素块进行DCT转换。如对一个8×8的图像可以将其分成4个像素块,利用一个统计参数去表示各像素块。

(13)
(14)
本课题在纹理图像分割上运用SVM算法作为定位车牌的方法,支持向量机的分类辨识精准度平均达到98.5%。选择3 000幅夜间图像作为测试样本,本课题定位算法与传统基于颜色或灰度信息分析算法的数据对比情况如表1所示,夜间车牌图像的辨识效果如图1所示。

表1 车牌定位对比数据
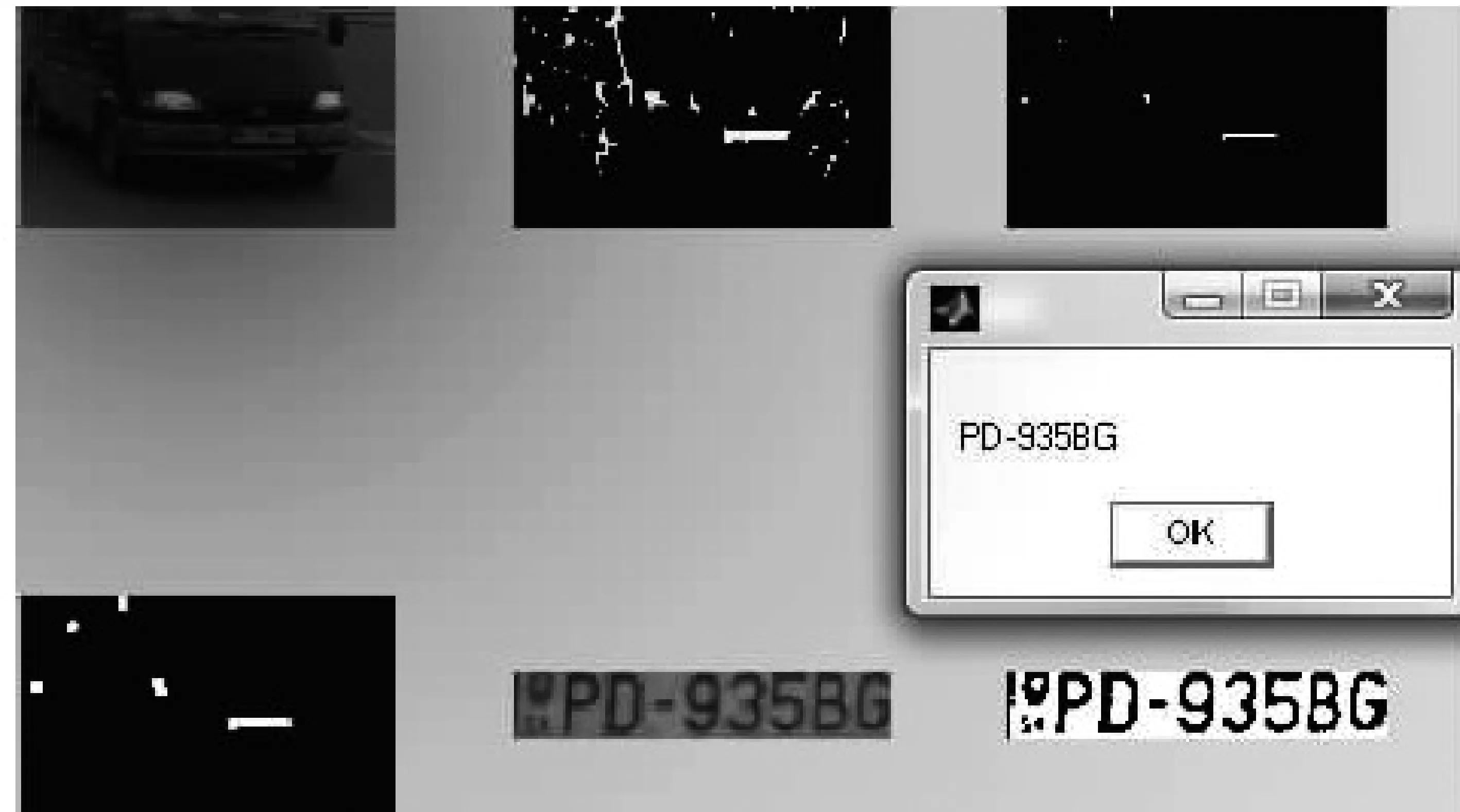
图1 夜间车牌图像的辨识效果
4 结语
本文在分析支持向量机工作原理的基础上,建立了以支持向量机理论为基础的车牌定位模型,并运用局部二值拟合模型对图像车牌区域灰度不均的缺点进行字符分割。结合实验结果,本文提出的车牌定位及字符分割算法精准度显著高于传统算法,具有一定推广价值。