不同载波信噪比对GPS-IR技术反演水面高度的影响
2022-11-21杨卓群黄子茹荣欣悦殷珂雅孙小荣
杨卓群,黄子茹,荣欣悦,刘 晗,殷珂雅,孙小荣
(宿迁学院 建筑工程学院,江苏 宿迁 223800)
全球定位系统(Global Positioning System,GPS)是以卫星为基础的无线电导航定位系统,具有全能性、全球性、全天候、连续性和实时性的定位、导航和授时功能,其已广泛应用于导航定位、近地空间环境监测等领域。接收GPS卫星信号的仪器称为GPS接收机,GPS接收机按用途可划分为导航型、测量型和授时型。测量型GPS接收机能够捕获到由GPS卫星发射的直接到达接收机的信号,称为直射信号,也可以接收被地面、水面等反射物反射后的GPS卫星信号,称为反射信号,直射信号和反射信号进入接收机后,会相互干涉从而形成多路径效应[1-2]。一直以来,为了提高导航定位精度,研究重点在消除或削弱多路径效应的影响上面。近年来,研究人员发现,GPS卫星发射的信号经反射物反射后,其信号特性会发生改变,且其反射信号特性也会随着地表环境的变化而变化。人们通过研究,在此基础上建立起了GPS反射信号与地表环境参数之间的数学模型,从而产生了一种新型的卫星遥感技术,即GPS-IR(GPS-Interferometric Reflectometry)技 术,GPS-IR技术有广泛的用途,如可用于监测水面高度、土壤湿度和积雪厚度等[3-5]。GPS-IR技术主要采用载波信噪比(Signal-to-Noise Ratio,SNR)观测值来反演地表环境信息,SNR是指接收机中信号与噪声的比例,通过反射信号的SNR建立与地表环境参数之间的数学模型。测量型GPS接收机的L1载波和L2载波均可输出SNR观测值。利用GPS-IR监测地表环境信息的有利条件在于广泛分布的连续运行GPS参考站,其能够获得高时空分辨率的地表环境监测信息。
在国外,Larson等[6-7]首次将GPS的SNR观测值用于海面高度测量,并进行了长达10多年的潮位变化监测,验证了GPS-IR可进行潮位高度测量。在国内,张双成等[8]也对GPS-IR监测潮位变化进行了研究,吴继忠、孙小荣等[9-11]也将GPS-IR用于湖面高度测量,均得到了较好地结果,进一步验证了GPS-IR可进行水面高度测量。
目前研究有采用L1载波或L2载波的SNR来反演水面高度,但何种载波SNR更适合水面高度反演,还需要进一步的研究。本文将研究GPS的不同信号载波SNR对GPS-IR测量结果的影响,分析不同载波SNR观测值对干涉参数估计结果的差别,哪种载波的SNR观测值更适用于GPS-IR水面高度测量。本文将从实验方面对其进行分析,为GPS-IR技术反演水面高度应用提供借鉴。
1 GPS-IR测量水面高度模型
反射信号信噪比SNRm序列呈近似“余弦曲线”形态,SNRm可表示为[12-14]
式中:A为余弦曲线的振幅;h为GPS接收机天线相位中心到反射面的垂直距离;E为GPS卫星高度角;φ为初始相位。
2 水面高度计算
由式(1)可知,只要获得SNRm及其对应历元的卫星高度角,通过模型解算就可以得到垂直反射距离等参数。令t=sinE、f=2h/λ、ω=2πf,则式(1)可以简化为标准的余弦函数形式
待估参数h包含在参数f中,式(2)是一个非线性模型,A、ω和φ均为待估参数,本文采用信赖域法进行参数估计。通过计算得到ω,再根据h=ωλ/(4π)算得h。
3 实验分析
3.1 实验数据采集
为了分析不同载波SNR对GPS-IR技术反演水面高度的影响,2011年5月13日,在武汉东湖岸边进行了测高试验。实验使用的是Trimble R8接收机,接收机架设在湖中间的房顶上,房子四周无遮挡,可以很好地接收到经湖面反射后的信号,如图1所示。实验观测时间约为4 h,采样间隔为1 s。观测期间的风速在1~3 m/s,湖面上的波浪相对平缓,波动约几厘米,4 h内湖面水位可以认为是恒定的,实验中多次用钢卷尺测量垂直反射距离为5.89 m。
3.2 实验数据处理
数据处理按以下流程进行:
(1)根据实验现场环境、卫星方位角和卫星分布图,GPS接收机共接收到6颗卫星来自湖面的反射信号,即PRN2、PRN5、PRN12、PRN15、PRN26、PRN27。
(2)提取观测文件中GPS卫星L1、L2载波的SNR观测值,同时计算对应历元的卫星高度角。
(3)选择卫星高度角在10~25°范围内的SNR观测值。由于GPS卫星的运行周期约为718 min,顾及到地球的自转和公转,在4 h的观测过程中,部分观测卫星会出现“上升”和“下降”2个弧段,选择其中观测时间长的弧段数据参与计算,用2阶多项式拟合得到的残余项即为SNRm序列。
(4)对SNRm和卫星高度角序列按照式(2),用信赖域法进行参数估计,得到垂直反射距离。
3.3 实验结果分析
为了分析不同载波SNR观测值对参数估计结果的影响,对1 s采样间隔的L1、L2载波SNR观测值及其参数估计结果进行了比较分析,结果见图2、3、4和表1、2。
限于篇幅,只给出了PRN5卫星L1、L2载波SNR和E的关系(图2),由图2可知,L2载波SNR小于L1载波SNR,SNR随着E的减小而减小,且L2载波SNR比L1载波SNR变化幅度大;其他5颗卫星也有类似的关系。
由图3可知,PRN5卫星的SNRm序列周期特性没有图4明显,其他5颗卫星也有类似的特性,这表明L2载波SNRm更能反映反射信号特性。
表1、2给出了6颗卫星观测值对应的参数估计结果。
由表1、2可知,除PRN2卫星,其他卫星估计结果精度均低于L2载波。从上述分析可知,L2载波SNR质量优于L1载波,原因是L2载波上伪随机码恢复的SNR精度较高。设备的SNR越大表明其产生的噪声越小,对于同一台GPS接收机得到的L2载波SNR小于L1载波SNR,说明混在L2载波信号里的噪声大于L1载波信号里的噪声。
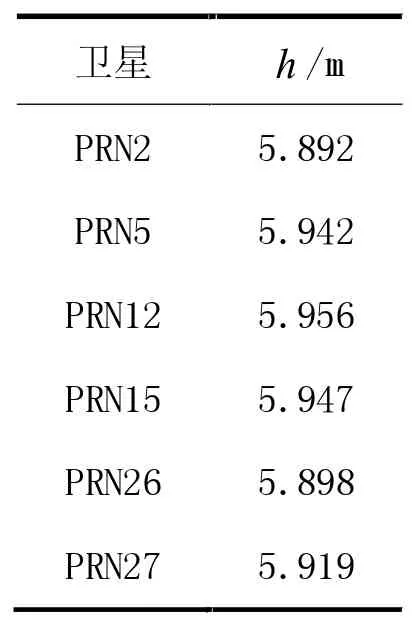
表1 L1载波参数估计结果
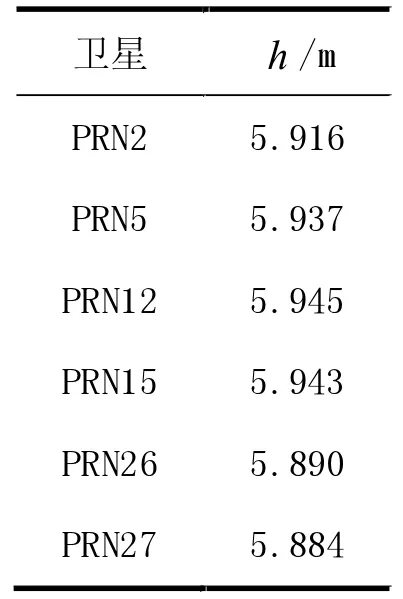
表2 L2载波参数估计结果
4 结论
测量型GPS接收机的L1、L2载波均可输出SNR观测值。本文从实验方面分析了L1、L2载波SNR观测值对GPS-IR反演水面高度参数的影响,L2载波信噪比较L1载波SNR更能反映反射信号特性,L2载波SNR更适合水面高度测量,其精度高且更加稳定,本文研究成果为GPS-IR技术反演水面高度应用提供借鉴。