区域生长在跑道异物检测中的应用
2022-11-21刘鸣秋熊龙杰
刘鸣秋,熊龙杰,章 林,沈 麟
(1.湖北国际物流机场有限公司,湖北 鄂州 436000;2.南京莱斯电子设备有限公司,江苏 南京 210000)
0 引言
机场跑道异物(Foreign Object Debris,FOD)泛指可能损伤航空器或系统的某种外来的物质[1],如金属器件、碎石块、高尔夫球等。国际民航组织(ICAO)规定,每天至少需检查4次跑道。当前,许多机场的FOD检查还依靠人工[2],不仅检查效率低,而且一旦出现大雾等不良情况,人眼也很难检查出较小异物。
杂波是雷达检测产生虚假目标的主要原因,当目标保持运动状态时,使用恒虚警检测[4-5]方法能够比较容易检测到目标[6];当目标保持静止时,从杂波中分辨目标会变得困难,所以在强杂波背景下的静态目标检测是系统面临的重要问题。常规的FOD处理流程由预处理和异物检测组成。首先,预处理定位目标所在区域,通常是选定机场的跑道区域作为观测区域;然后,过滤掉区域中的杂草、不均匀路面、积水和跑道灯等易产生的大量杂波的物体;最后,运用FOD检测算法从接收到的回波中找出跑道异物。FOD监视雷达通常安装在位于机场跑道附近的草地上,允许距离跑道中心50 m。在实际应用中,雷达扫描区域为非均质草地和准光滑表面,安装高度也要限定在特定范围,掠射角很低,因此杂波功率要比常规雷达高。杂波往往随着天线的扫描具有时变特性。在复杂的背景中,特别是杂波背景能量强于异物回波时,FOD检测能力会大大降低,容易漏检目标,这时FOD就需要人工排查。
文章针对边灯式FOD雷达在杂波区域常规检测算法异物检测能力差的问题,提出了一种基于图像的区域生长杂波区域目标提取算法。首先,分析区域生长方法的原理并其生长流程;其次,通过仿真验证了区域生长方法对特征区域提取的有效性;最后,将区域生长方法应用到跑道雷达异物检测中。实测试验结果表明,该方法能够有效抑制雷达杂波区域的虚假目标,降低机场跑道异物(FOD)检测系统虚警,提高雷达目标发现能力。
1 信号模型
Arc-SAR快速成像算法信息处理流程,如图1所示。在极坐标下,雷达通常采用调频连续波[7](Frequency Modulated Continuous Wave,FMCW)体制,采集的原始回波可以表示为:

图1 Arc-SAR快速成像算法信息处理流程

(1)
式中:λ表示发射信号的中心波长,θbw为无线波束宽度,pm,t表示第m个脉冲的t时刻,φ表示方位角。
随后,进行傅里叶变换,并通过“驻定相位定理”得到信号的二维频域表达式:
(2)
其中:Bθ为方位向带宽,f和fθ分别为t和θ的频率。
接下来需要对二维频域信号做频域匹配滤波,二维频域匹配滤波器可以表示为:
(3)
式中:
(4)
(5)
最后,对二维频率滤波结果做二维傅里叶逆变换,可得到点目标在极坐标格式下的时域Arc-SAR图像。
2 基于图像区域生长的杂波抑制方法
2.1 区域生长原理
二维仿真图像的分辨力与作用距离无关,且图像背景杂波的统计结构分布极为复杂,很难用一种概率分布函数描述杂波空间的分布特征,这些都增加了图像准确分割与特征提取的难度,如图2所示。区域生长基本思想是将具有相似性质的像素集合起来构成最大一致性的区域,可以有效地提高图像分割与特征提取的准确度。
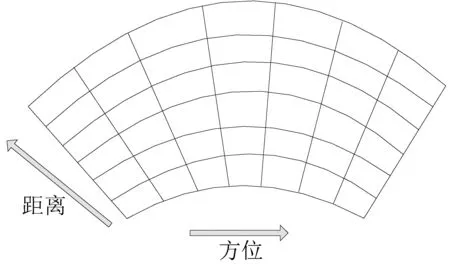
图2 距离-方位网格示意
杂波图恒虚警检测技术对于慢变杂波有一定的抑制作用,其原理是将监测区域划分成距离-方位的二维网格,通过统计单个网格内的数据回波随时间的变化特性,利用时间平均消除杂波能量。但杂波对消的方法对于杂波存在于边缘位置的效果不好,容易产生边缘的微小颗粒杂波,从而导致雷达检测错误,产生虚假目标。通过图像阈值法处理,设图像为f(x,y),其灰度范围是[0,L],在0和L之间选择一个合适的灰度阈值T可以实现图像的灰度分割。由于图像阈值法的直观性和易于实现的性质,使它在图像分割领域中处在中心地位,但在阈值分割后不可避免地会出现与目标灰度接近的背景区域,从而产生噪声干扰[8],影响检测结果。
区域生长就是考虑到了图像的空间性质,将相同性质的像素合并起来形成统一的区域。将此原理运用于雷达回波图像中,先把回波划分成互相连通的距离-方位网格,再通过阈值分割和属性合并的方法实现杂波区域的提取[9]。区域生长就是指将感兴趣的区域(杂波区域)从图像中分离出来,通过区域分割方法将图像划分为不同的区域,来达到杂波抑制的目的。
2.2 区域生长流程
区域生长首先对每个需要分割的区域找一个种子像素,将其作为区域生长的起点;然后,利用能够将相邻像素包括进来的准则,依据准则搜索种子周围的像素,将具有相同或相似性质的像素合并到种子像素所在的区域,再将新像素作为新的种子重复上述搜索过程;最后,制定生长过程停止的条件或规则。当搜索过程满足停止条件时,退出搜索,完成区域提取。
具体处理流程:(1)对接收的雷达图像进行预处理,按照距离-方位划分图像网格;(2)选定感兴趣的像素区域(杂波区域),选择其中一个像素点作为种子点;(3)以该种子点为中心,搜索它的相邻像素(4邻域或者8邻域),若像素点的灰度差小于给定的阈值,将它们进行合并;(4)以新合并的像素为中心,重复步骤3;(5)若区域不能进一步扩张,则退出。
2.3 示例分析
图3是区域生长的例子,其中图3(a)是区域生长之前的图像,数值的大小代表了能量的差异。假定数值大的区域是杂波区域,可以采用区域生长的方法实现杂波区域的提取。首先,选择图像的中心区域数字5作为杂波区域的起始点,即种子点,如图3(a)所示;然后,以种子点5为中心,基于区域灰度差准则开始搜索它的相邻像素,给定的灰度差阈值是1.5,那么当周围区域的数字大于3.5以上时,则将他们合并到杂波区域;最后,将新加入杂波区域的网格位置看作新的种子,重复搜索步骤,直到杂波区域不再增加新的种子为止。图3(b)是区域生长之后的结果。

图3 区域生长
3 试验结果
以2021年11月淮安机场的FOD探测系统的图像数据为例进行分析。采用边灯式FOD雷达进行测试,系统采用FMCW信号体制,架设于跑道一侧,观测10°~170°扇区范围内异物,系统最大探测量程100 m,发射功率20 dBm。跑道异物探测示意,如图4所示。

图4 跑道异物探测示意
从包含异物的跑道图像,可以看到图像中包含均匀的背景噪声,并且近距离有较强的杂波,如图5所示。选取距离-方位网格中的近距离杂波点作为种子点,按照区域生长的方法提取杂波区域,经过区域生长后的雷达回波图像,如图6所示。可以看见,经过区域生长能够准确标示杂波区域。在未采用区域生长方法的包含异物的跑道图像进行FOD检测的结果,杂波区域产生了虚假目标,如图7所示。对区域生长后的跑道图像进行FOD检测,由于剔除了杂波区的虚警的影响,近距离的虚警得到抑制,FOD检测结果如图8所示。对比图7和图8可知,运用区域生长方法提高了FOD检测的准确性。图5—8纵坐标距离标尺为0.15,单位为米;横坐标方位单位为度。

图5 含异物的跑道图像

图6 区域生长后的跑道图像
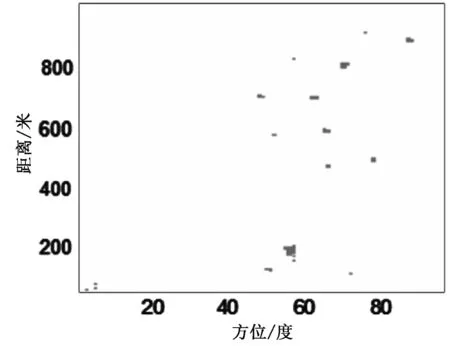
图7 区域生长的异物检测
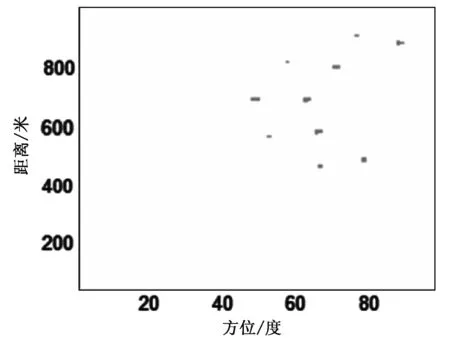
图8 区域生长的异物检测
4 结语
跑道异物检测是保障机场安全的重要内容,针对规检测算法在杂波区域FOD检测能力差的问题,本文分析区域生长方法的原理并其生长流程,仿真验证了区域生长方法对特征区域提取的有效性,并将区域生长方法应用到跑道雷达异物检测中。实测试验结果表明该方法能够有效抑制雷达杂波区域的虚假目标,提高FOD检测能力。