汽车智能预警防撞刹车系统研究
2022-11-17莫舒玥林土淦
莫舒玥,林土淦
(广西交通职业技术学院,广西 南宁 530023)
0 引言
道路上经常发生因驾驶员技术不娴熟,跟车距离太近未及时刹车等导致的机动车追尾事故,甚至引发人员伤亡。因此,国外汽车企业已经开始研发车辆智能防撞刹车系统,如沃尔沃的City Safety主要通过车身周围的摄像头和传感器感应路况,系统控制车辆实现自适应巡航、主动刹车等功能;奔驰公司利用毫米波雷达探测前方车辆运行情况,通过处理毫米波雷达返回的电波判断危险级别自动调节车速,使之与前车保持安全距离,避免事故发生[1]。
国内开展相关研究的主要是高校。吉林大学团队利用激光雷达、毫米波雷达、高精度定位GPS等设备搭建了整车控制系统,实现了道路的3D建模以及典型道路工况下的自动驾驶[2]。长安大学团队结合机器视觉图像处理技术和Zig Bee传输技术,通过识别前方车牌的方式,在此基础上开发车辆行驶状态的汽车防撞预警模型[3]。河南护航公司开发的护航卫士AEBS主动预警防撞辅助主要通过激光测距雷达测距测速,通过信息处理控制模块进行数据处理和判断并通过制动电机控制刹车实现前向碰撞预警和自动刹车功能。国内市场目前的汽车智能预警防撞刹车系统产品非常少,且价格超过2万元。因此,研发汽车智能预警防撞刹车系统,对保障行车安全很有意义,此系统在提升车辆道路安全行驶方面具有很大的市场前景,如实现规模生产,售价可以降至8 000元以下。
1 设计思路及原理
智能防撞刹车系统通过实时监测车辆前后方(倒车时检测车辆后方)道路状况,判断与障碍物相对距离是否处于设定的安全阈值内,如果低于报警的一级安全阈值,系统应能发出声光报警,如果此时驾驶员没有刹车,且同时距离进一步缩短,低于制动的二级安全阈值,系统会主动介入刹车以避免发生碰撞事故。
1.1 设计思路
本文设计的智能预警防撞刹车系统应实现以下功能:车速0~80 km/h内实时监测车辆前方障碍物的相对距离和相对速度;对0~10 km/h等起步或倒车情况,监测车辆前后方的车辆和行人,判断相对距离;在10~80 km/h车速时监测车辆前方障碍物,判断相对距离;当车辆与障碍物距离低于一级报警安全阈值时发出提醒,低于二级安全阈值时主动刹车,以最大限度避免事故的发生。同时系统尽量提高反应准确性。
1.2 设计原理
该汽车智能预警防撞刹车系统主要由测量感应模块、数据接收处理模块和执行命令模块三部分组成。
测量感应模块主要就是通过车头正前方的激光传感器和车头、车尾红外传感器对前方车辆或行人等进行实时探测,传感器发送信号遇到障碍物或行人时反射回来被接收,信号经过滤波、降噪处理;同时OBD接口读取实时车速、方向盘转角及档位信息;以上信息被数据接收处理模块处理后判断当前是否处于安全阈值内,当低于一级安全阈值时,执行声光报警,如果驾驶员未做出正确反应,两车距离继续靠近,如果此时低于二级安全阈值,则制动电机驱动制动踏板进行车辆的制动。
CAN收发器主要实现数据的发送和接收功能,通过CAN总线接收传感器信息,传送到数据接收处理模块,相应的执行命令也通过CAN收发器发送给执行命令模块。系统控制原理如图1所示。
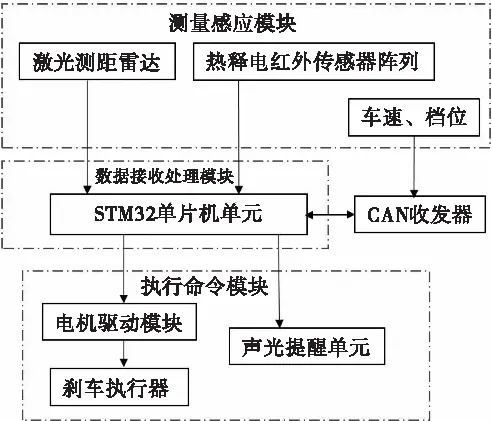
图1 预警防撞刹车系统控制原理图
2 建立安全测距模型
合理地设计安全阈值,能保证系统做出正确的判断,要实现两个功能:(1)预警后驾驶员有充足的时间刹车;(2)系统执行主动刹车情况下,停止后能与障碍物保持一定的安全距离。
当驾驶员遇到危险时,需要时间反应并踩制动踏板。安全距离S需满足驾驶员意识到危险,踩下刹车,车辆开始减速直至静止的要求。假设驾驶员意识到危险并踩下制动踏板的时间为t1,制动踏板被踩下到消除制动踏板间隙需要的时间为t2,从产生制动力到制动力达到最大的时间为t3,此时减速度达到最大值amax,此后驾驶员松开制动踏板制动力消失,减速度为零。假设初始速度为v0,则此时安全距离S为S1,安全阈值设定如式(1)所示[4]。如果前方障碍物为静止,则车辆也应该制动到停止,且应该保持安全距离为S0,为了避免碰撞,此时设定S0最小值为2 m。
(1)
如果驾驶员没有制动,相对距离进一步缩短,则需要制动电机驱动刹车执行器进行减速。则此时安全距离为S2,安全阈值设定如式(2)所示[4]。
(2)
经查询资料,驾驶员反应时间t1一般为1.0~1.36 s[5]。液压制动器消除踏板间隙的时间t2一般为0.15~0.25 s,达到最大减速度的时间t3一般为0.2 s[6],为保障车辆尽快停止,最大减速度amax取7.5~8 m/s2。在系统设计的安全测距模型中,t1取值1.1 s,t2取值0.15 s,t3取值0.2 s,最大减速度amax取8 m/s2。
当车速<10 km/h时,因为车速比较慢,一般报警后驾驶员有足够的时间执行刹车,因此设定安全距离S≤0.5 m时执行刹车。
系统判断逻辑如图2所示。系统实时探测车辆的实时车速以及与障碍物相对距离,当车速≤10 km/h时,传感器探测车辆与障碍物的相对距离是否≤2 m且>0.5 m,如果是则采取声光报警,如果<0.5 m,则执行刹车。如果车速>10 km/h,则传感器探测相对距离是否>S2且≤S1,如果是则执行报警,若此时驾驶员仍没有采取制动操作,则传感器探测到的相对距离进一步减小,当≤S2且>S0时,自动执行刹车操作。如果相对距离不在系统设定的安全阈值内,则重新进行探测。
3 系统设计
3.1 硬件单元选择及设计
本文设计的汽车智能防撞刹车系统包括TF03激光雷达、红外线传感器、STM32f103vet6单片机、CAN总线、制动电机、语音报警及显示屏等。
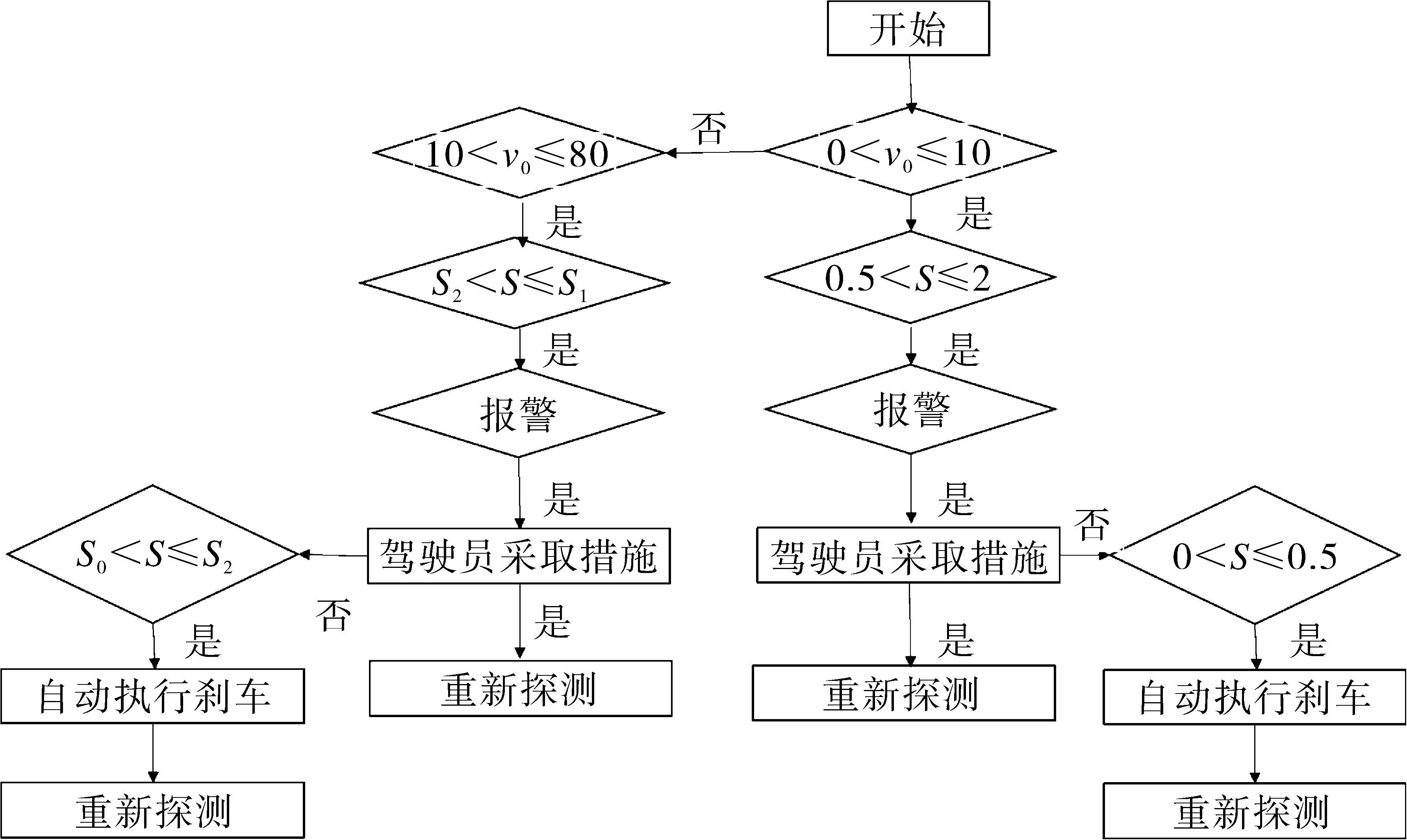
图2 智能防撞自动刹车系统判断逻辑图
TF03激光雷达测量距离可以达到180 m,雷达体积小,是汽车专用的用于前方探测预警防撞的最佳传感器,安装在车头中网正中。
STM32f103vet6单片机芯片提供十多种接口,数据通信方便,方便连接各类模块开发。
红外线传感器选用热释电红外传感器,主要装在车头、车尾保险杠处,各均匀分布5颗。其探测范围达到3 m,作为激光传感器的补充,主要探测车辆低速状态前方和后方近距离(如起步、倒车)周围行人、动物等障碍物。
制动执行器主要包括制动电机和单向拉杆,制动电驱动单向拉杆的齿条拉动制动踏板执行刹车的操作。不需要执行制动操作时,则不与制动踏板接触,不影响驾驶员操作。
系统硬件设计如图3所示。
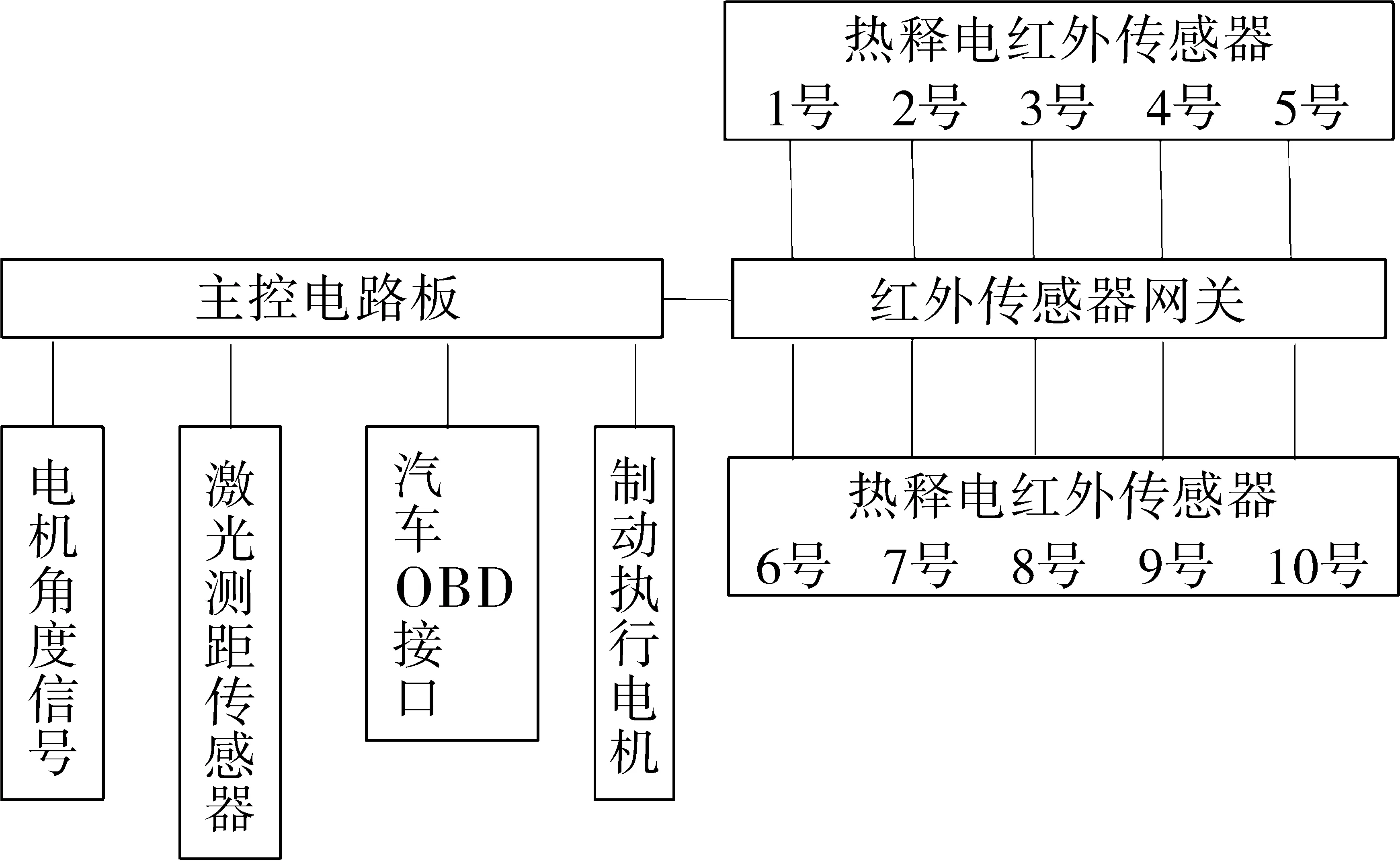
图3 系统硬件设计原理图
3.2 软件设计及电路控制原理
系统电路设计及控制原理如图4所示。单片机U1负责与360°激光测距传感器通信,读取所需要的角度和距离信息;与红外传感器阵列通信,读取各个位置传感器信息,并进行测量数据的分析处理。同时,单片机U1与CAN收发器U2连接进行通信,CAN收发器U2读取车速、方向盘转角和档位信号并进行数据分析处理。单片机U1对数据进行数字滤波和综合分析,对比安全距离阈值,根据智能防撞自动刹车系统判断逻辑控制器计算,由计算结果判断,若需要提醒驾驶员,则将提示内容发给声光报警电路,实现报警功能;若需要刹车,则通过控制电机控制拉杆拉动刹车踏板实现刹车。
4 试验分析
将智能预警防撞刹车系统安装在试验车辆上,选择平直、路况良好的封闭路段,在晴朗天气条件下,于干燥水泥道路进行了0~80 km/h的实车试验。测试内容为检测系统是否能在车辆与障碍物相对距离低于一级安全阈值范围时进行报警,且相对距离进一步缩短到二级安全阈值范围时,驱动电机成功介入制动。
在试验车辆前方停放一台静止车辆,试验车辆分别以10 km/h、20 km/h、40 km/h、60 km/h和80 km/h的速度进行试验,各试验10次。另外,针对车辆倒车后方有障碍物(行人)的情况进行测试。试验结果如表1所示。
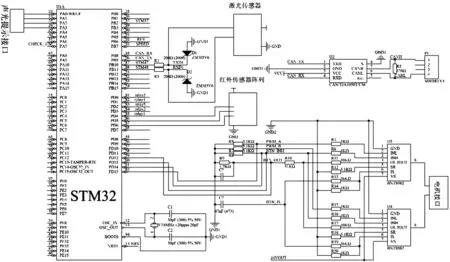
图4 主控电路板电路图
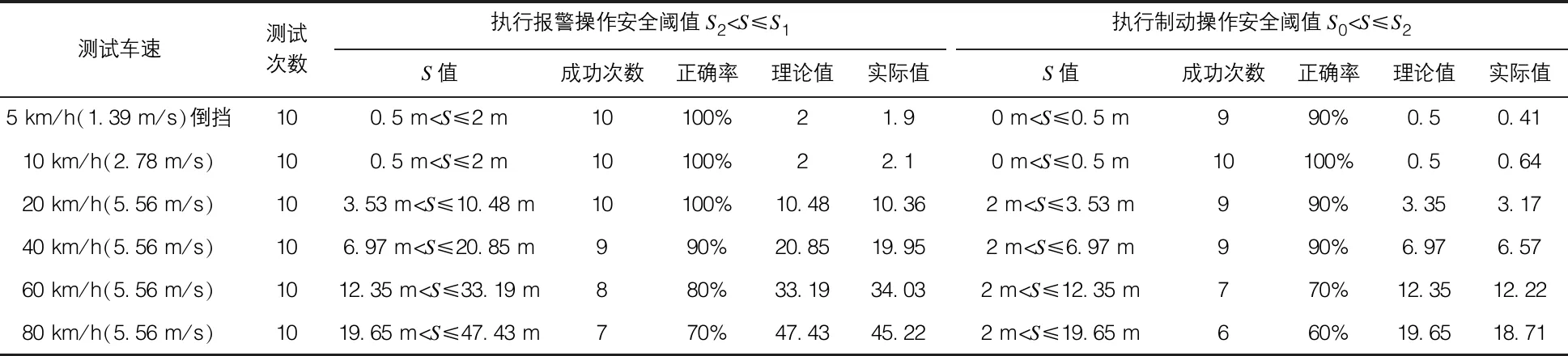
表1 系统执行报警及制动试验数据统计表
2.理论值指该车速下理论情况做出相应反应时试验车辆与障碍物的相对距离(m);
3.实际值指该车速下实际情况做出相应反应时试验车辆与障碍物的相对距离平均值(m)
试验结果显示,试验车辆在低速10 km/h以下时,系统能较好地识别判断车辆前方的障碍物,并能发出预警或自动刹车的操作。速度在40 km/h以下时,系统反应准确率较高,随着车速的增加,系统检测和判断率有所下降。
5 结语
本文设计的智能预警防撞系统,与目前市场上单独前向或后向预警防撞有所不同,将前向预警防撞和后向预警防撞进行了融合,使得车载系统进一步简化,但随着车速的增加,系统的探测精度和反应准确度有所下降;另外,系统设计的安全阈值设定的数值较大,在实际的道路中,特别是城市道路中,此距离可适当缩短,以提升车多路况的适应性。经分析,下一步研究计划可进行以下改进:激光传感器在检测中存在一定的误判,可采用在前方增加一个毫米波雷达共同与激光雷达检测的方式增加探测精度;通过改进系统控制模型以及安全阈值算法,如增加雨雾天气、湿滑路面的安全距离模型来增加系统判断的准确性;增加对道路旁边树木、路牌、隔离栏等的虚警率的处理,以应对更加复杂的道路情况,使得系统的适应性和准确性进一步提升,以适应市场的需要。
