北斗系统应用环境下的车速引导效能分析
2022-11-17陈杰威郑欣悦宫文浩
陈杰威,郑欣悦,刘 丹,宫文浩
(广西交通职业技术学院,广西 南宁 530023)
0 引言
北斗卫星导航系统(以下简称“北斗系统”)是我国自主研发的全球卫星导航系统。北斗系统在交通领域的应用,为车路协同的智慧交通体系提供了新思路、新方案[1-3]。交通路口是城市交通的命脉,但由于车辆驾驶者无法“超视距”感知前方路口信号灯的状态,碰到红灯的等停影响了路口通行效率。
采用北斗系统和5G通信技术的车路协同系统,可以增强车辆及其驾驶者对道路环境的感知能力,帮助驾驶者提前优化行驶方式,通过改变或保持车速,使车辆尽可能在路口遇到绿灯并顺利通过,进而提高交通路口的通行效率,改善驾驶体验[4-5]。
本文将对北斗系统应用环境下的交通路口车速引导系统的效能进行分析,以验证北斗系统的应用可以有效改善交通路口的通行效率。
1 车速引导
1.1 引导模型
为简化现实交通路口的模型,引导过程只考虑单一车辆直行在需要通过一个交通信号灯路口的路段。模型中车辆和信号灯均具有北斗卫星导航和5G通信功能,构建信息同步共享链路,如图1所示。
从图1可知,“引导区”指车辆到达交通路口前的一段道路,车辆在引导区中按照一定的引导方法的指引执行车速优化。引导方法将根据引导区的长度、车辆的车速和信号灯的状态等信息,算出一个参考车速来引导车辆,以使车辆可以恰好在到达路口时遇到绿灯,可直接通过交通路口,减少停等红灯的概率和时长。
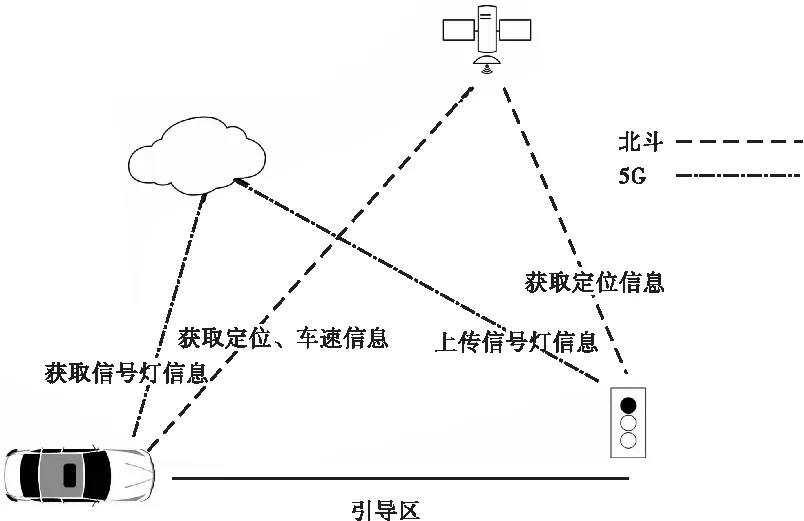
图1 车速引导模型示意图
1.2 北斗系统应用环境
在车速引导系统中,北斗系统主要是为车辆和信号灯提供位置和速度的测算服务。其中信号灯的位置和移动速度是不变的,易于校准,在此假设为无失真的。而车辆的位置和移动速度是时变的,北斗系统的测算误差将对引导结果造成影响。其中速度测算误差在10-3m/s数量级,可忽略不计,故主要考虑位置测算误差。位置测算误差可能导致实际引导区长度与预设引导区长度不同,使实际通过情况与预期不一致。
北斗系统常用圆概率误差(Circular Error Probable,CEP)描述定位偏移度。常见的民用北斗终端性能指标CEP 50约为2.5 m,即定位有50%的概率是误差在2.5 m以内。如式(1)所示,根据上述CEP得出的车辆定位误差,ΔL符合的概率密度分布:
ΔL~N(0,0,2.12,2.12,0)
(1)
其中N为二维正态分布,经、纬方向均值均为0 m,经、纬方向标准差均约为2.12,协方差为0。如图2所示。
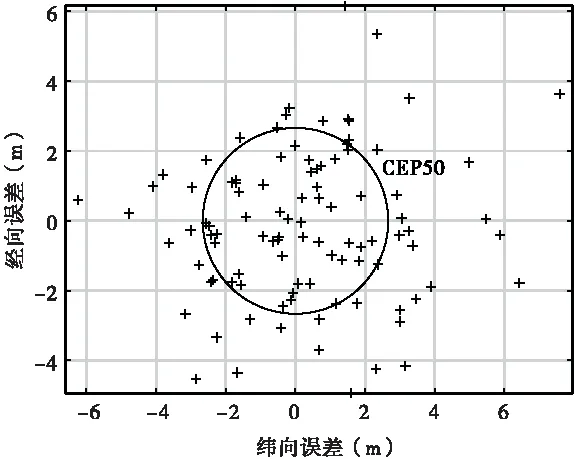
(a)北斗定位偏移
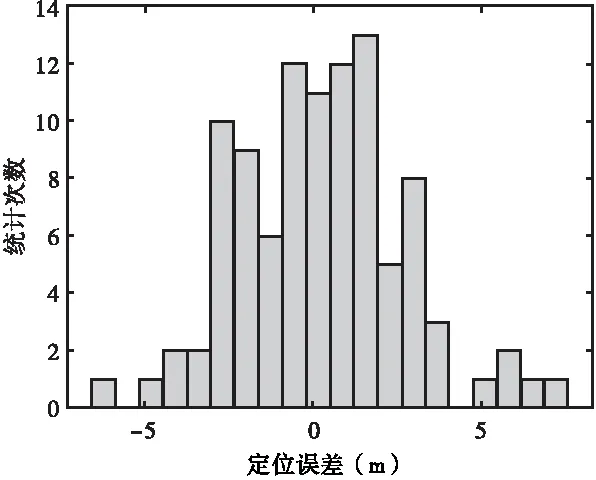
(b)行进方向定位偏移
如图2(a)所示为根据上述二维正态分布做100次仿真的散点图,其中圆圈为CEP 50范围。在车速引导的场景中,主要考虑行进方向的偏差。此处选择纬线方向作为行进方向,不失一般性。如图2(b)所示为100次仿真中纬线方向的定位偏移统计直方图。
1.3 引导方法
车速引导主要包括“通过情况预判”和“引导速度计算与执行”两个步骤。通过情况预判指根据当前车辆的时速以及预设的引导区长度,预判保持当前车速行驶是否能够恰好遇到绿灯并通过路口,并以此为据决定引导策略。
依据相关交通法规和出于交通路口的安全性考虑,黄灯亮起时,车辆也应停止行进。为方便描述,本文假设黄灯等同于红灯,信号灯计时采用正数计时。该假设与现实情况在数学上具有等效性。因信号灯的计时具有周期性,本文将某事件发生时的信号灯计时,定义为事件发生的“等效计时时间”。
1.3.1 总体方案
如图3所示,如车辆到达路口时的等效计时时间te落在红灯区间,代表在通过情况预判中不能顺利通过的情况,此时有两种方案可供选择。
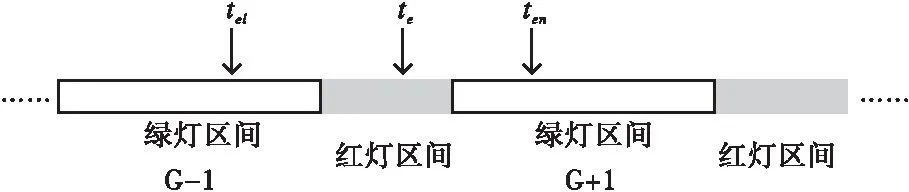
图3 交通灯时序图
方案一:提速追赶上一个绿灯区间G-1,即将te提前到tel的位置。
方案二:减速等待下一个绿灯区间G+1,即将te推迟到ten的位置。
以尽快通过作为优化标准,优先选择方案一。
1.3.2 引导速度计算
由于驾驶者的驾驶习惯不同,在计算引导速度时,车辆加、减速的加速度值是不可预知的,故下文将按照车速突变模型进行计算。
1.3.2.1 方案一
如图4所示,t0为车辆进入引导区的时间,te为按原速度行驶到达交通路口的等效计时时间。优化的目标是将te提前到G-1绿灯区间范围内。
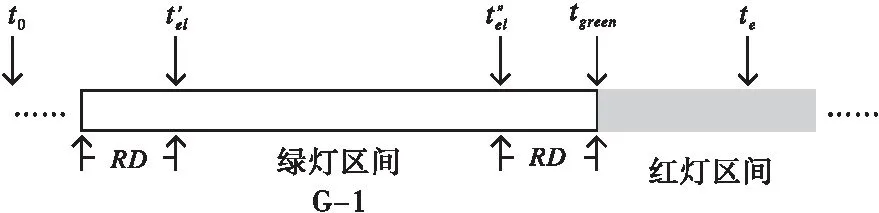
图4 优化方案一的时序图

(2)
式中:L——引导区长度;
v——车辆的当前时速;
tgreen——绿灯的时长。
时间因果约束条件,即车辆到达路口的时间,不能早于车辆进入引导区的时间。如式(3)所示,在时间因果约束条件下,对式(2)所得结果做出修正:
(3)
道路限速约束条件,即车速不能高于道路最高限速。如式(4)所示,表示根据该约束条件得出方案一的最终优化速度vgui1:
(4)
式中:vmax——道路的最高限速。
1.3.2.2 方案二

(5)
式中:T——红绿灯一个周期的时长。
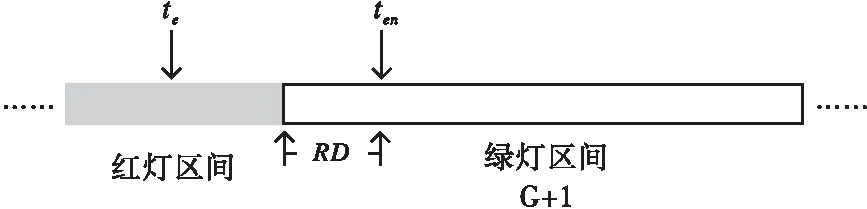
图5 优化方案二的时序图
方案二也需考虑道路限速约束条件。车辆以过慢的速度行驶,会导致交通效率下降。此处设定最低限速vmin。如式(6)所示为根据该约束条件得出的方案二的最终优化速度vgui2。
(6)
1.3.2.3 临界情况
当通过情况预判为能通过但属于临界情况时,也需要对车辆进行速度引导,以避免刚好在临界点到达路口的情况发生。

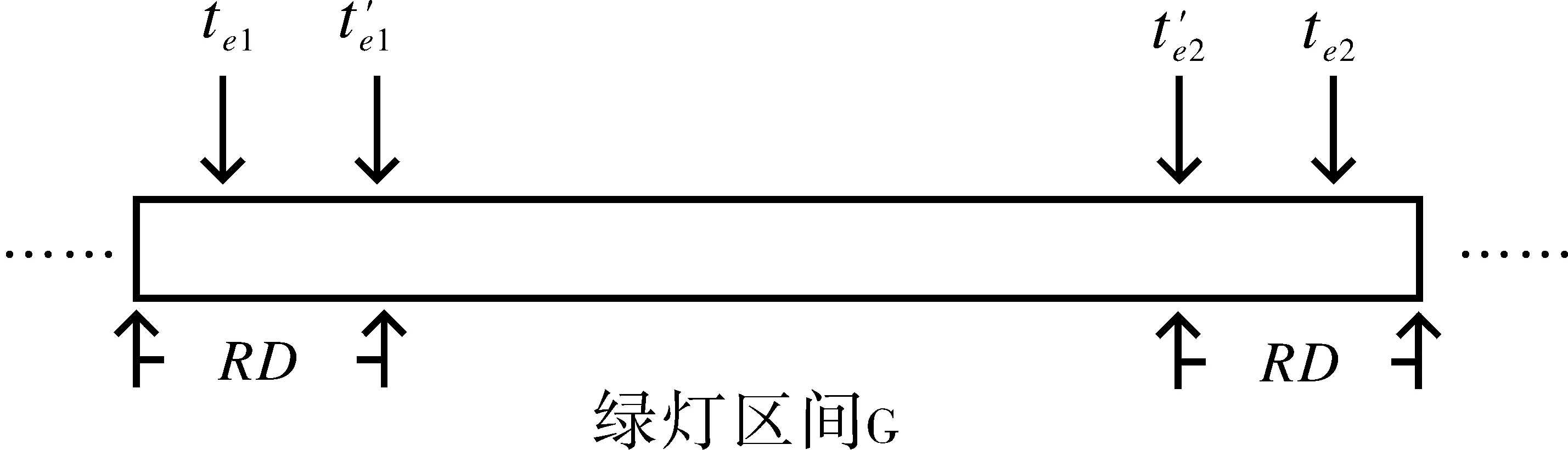
图6 临界情况优化时序图
2 仿真测试
2.1 仿真流程
如图7所示,每一轮实验包括了多次独立重复实验。每一轮实验中全局参数固定不变,模拟某一路段;每一次独立重复实验的车辆参数不同,模拟不同车辆通过该路段。参数的具体定义如表1、表2所示。
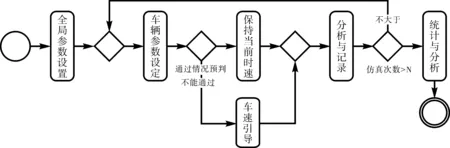
图7 仿真系统流程图
“通过情况预判”和“车速引导”模拟了车速引导优化的过程,如前文所述。“分析与记录”是按照运动学规律,客观分析车辆的通过情况,采用车速匀变速模型,更接近现实车辆情况。此处与前文的速度突变模型不同,将导致部分引导计算时预期能通过的车辆最终不能顺利通过。这是本文引导方法的缺点之一。
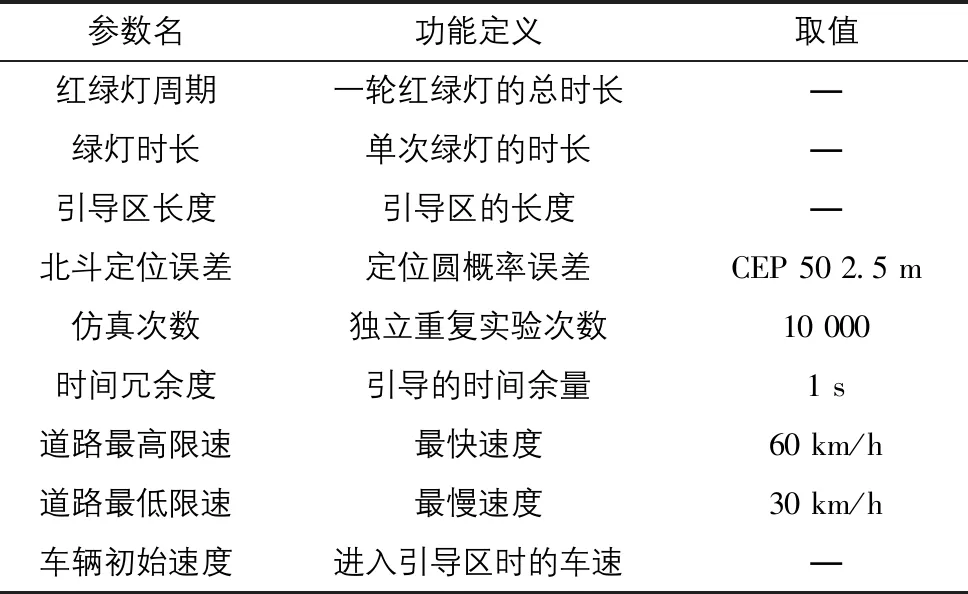
表1 全局仿真参数列表
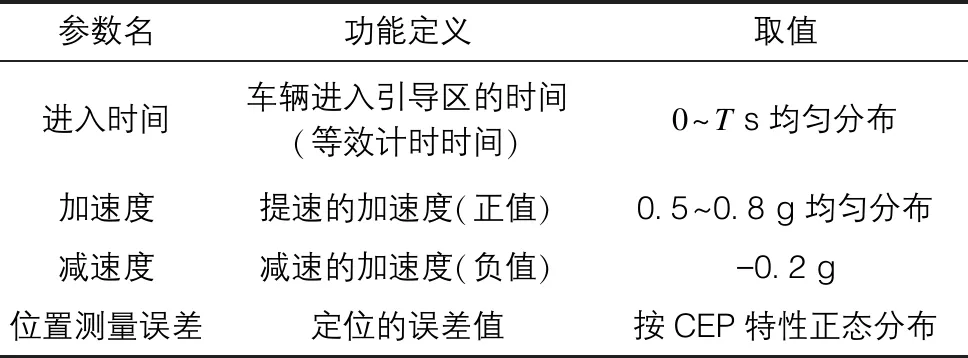
表2 车辆仿真参数列表
2.2 结果和分析
根据概率论原理可知,在没有车速引导的情况下,一次通过率的期望值等于绿灯时长占比,平均等待时间的期望值等于红灯时长的1/2。以此为参照,可以得出车速引导的效能结论。
2.2.1 实验一
实验参数:红绿灯周期60 s,绿灯时长40 s,车辆初始速度为40 km/h。
如后页表3所示,一次通过率有效提高,车辆的等待时间明显降低。而且,随着引导区长度的增加,效能得到进一步提高优化。
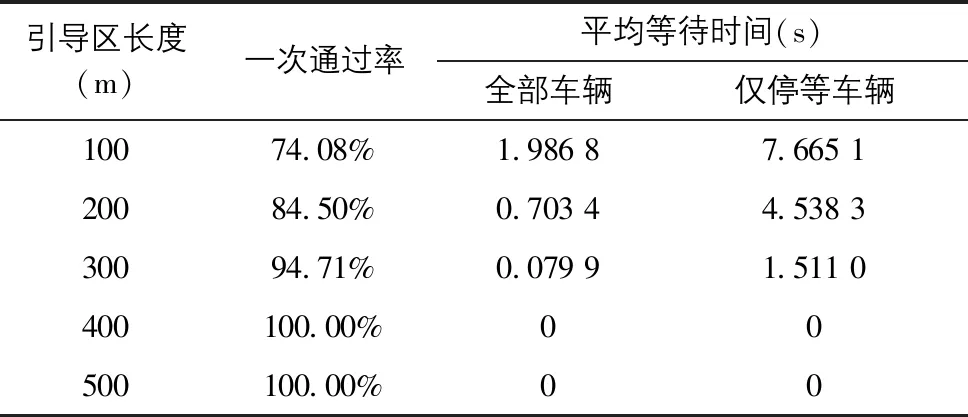
表3 实验一仿真结果表
2.2.2 实验二
实验参数:红绿灯周期为60 s,绿灯时长为30 s,引导区长度为300 m。
如表4所示,车辆以30~60 km/s的不同车速进入引导区后,一次通过率均有了显著提高,等待时间均显著下降。
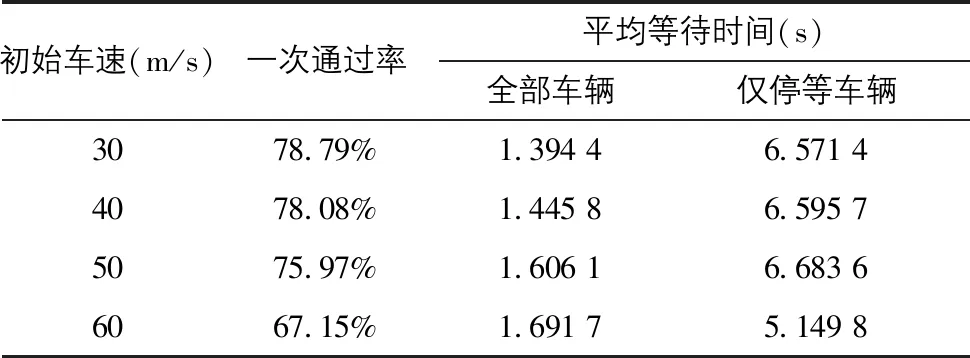
表4 实验二仿真结果表
3 结语
本文采用Matlab建模仿真的方法,实验并分析了在北斗系统应用环境下车速引导系统的效能。实验结果表明,基于北斗系统的车速引导可以有效提高交通路口的通行效率,并显著减少车辆因为红灯而产生的等待时间。本研究还存在不足,没有考虑多车辆、多车道、多行驶方向等因素,后续将结合更多维度的影响因素进行实验分析。
