面向复杂交会对接任务的星间链路设计与验证
2022-11-16龙吟黄才丁凯张克楠杜文志夏奕赵岩松
龙吟 黄才 丁凯 张克楠 杜文志 夏奕 赵岩松
(北京空间飞行器总体设计部,北京 100094)
我国空间站工程任务的第1步,是由若干独立飞行器(包括天和核心舱、问天实验舱、梦天实验舱、神舟载人飞船、天舟货运飞船)通过运载火箭发射入轨,并经历若干次变轨,飞行至交会对接轨道后,通过各种交会对接敏感器、相对测量及通信的手段,作为交会对接姿态轨道控制的输入,并最终完成交会对接任务形成组合体构型[1]。已经在交会对接轨道正常飞行并等待来访飞行器完成交会对接任务的飞行器,称为目标飞行器。空间站工程任务中,目标飞行器一般为天和核心舱或其组合体。经历发射入轨、远距离导引段的若干次变轨后进入交会对接轨道,寻找目标飞行器并完成交会对接任务的飞行器,称为追踪飞行器。追踪飞行器和目标飞行器在飞行过程中除了各自作为独立飞行器的对地或对天测控链路外,还需要建立星间链路,通过星间链路实现两者的信息交互,为顺利完成交会对接任务提供重要保障。追踪飞行器至目标飞行器的星间链路称为前向链路,目标飞行器至追踪飞行器的链路称为返向链路。仅支持前向或者后向交会对接的任务为普通交会对接任务,同时支持前向、后向及径向交会对接的任务为复杂交会对接任务。
文献[2]中描述了“国际空间站”(ISS)与来访飞行器之间的星间链路设计,通过基于特高频(UHF)的CPFSK调制方式,实现发射和接收,支持传输1.024 kbit/s遥控和6.4 kbit/s遥测数据,支持的最大传输距离为7 km,具备简单可靠的优点,但是传输带宽受限,无法满足大数据量的星间链路传输需求,同时传输距离受限和缺乏抗干扰能力。文献[3]中介绍了神舟八号载人飞船与天宫一号目标飞行器之间的星间链路,采用S频段通信,同时通过采用抗干扰能力强、保密性能优的直接序列扩频通信技术,实现交会对接过程中的双向通信,前向、返向有效数据带宽分别达到2.04 kbit/s和20.4 kbit/s,通信距离分别为7 km和77 km。相对于ISS的UHF星间链路,该星间链路具备传输带宽高、抗干扰能力强的优点,但是也存在前向链路带宽和工作模式受限的缺点,仅支持前向及后向交会对接模式,无法适应径向交会对接模式下追踪飞行器对地及对天链路视场受限的工况。文献[4]中提出了基于微波雷达和微波应答机的用于月球轨道交会对接的星间链路方案,前向、返向链路带宽分别达到1 kbit/s和4 kbit/s。该方案具备依托任意一个航天器实现天地代传的优点,但是缺少抗干扰能力和通信距离方面的设计和描述,同样受限于传输链路带宽。文献[5]中提出的星间链路方案主要用于导航星座的在轨服务,无法直接应用于交会对接任务。文献[6-7]中提出了一种双工作模式的空空通信机的设计与实现,从单机层面为支持交会对接的星间链路提供参考,但是缺乏系统层面的设计及实现。
本文提出一种支持复杂交会对接任务的星间链路设计,首先对复杂交会对接任务中追踪飞行器和目标飞行器之间的星间链路进行需求分析,根据需求分析结果对星间链路完成物理层、链路层和应用层设计,并且从通信距离、抗干扰能力、链路带宽和支持多种交会对接模式等方面进行优化,最后用在轨飞行任务对设计进行验证。
1 需求分析
本节对支持复杂交会对接任务的星间链路的需求进行梳理,主要从代传数据、相对测量、自主控制和双向通话4个方面进行分析。
1.1 代传数据的需求
追踪飞行器从发射到完成交会对接任务,按照飞行阶段划分,依次经历发射段、远距离导引段、近距离导引段、平移靠拢段、交会对接段和组合体段。在发射段和远距离导引段,追踪飞行器和目标飞行器的相对距离及轨道相位差距较大,不在同一地面站和中继卫星的测控弧段内,两者作为独立飞行器完成各自的测控通信任务。在近距离导引段、平移靠拢段和交会对接段,追踪飞行器和目标飞行器的相对距离变小,轨道相位逐步逼近,两者之间通过星间链路完成信息交互。在组合体段,追踪飞行器和目标飞行器通过对接总线完成信息交互。追踪飞行器通过星间链路将自身数据发送至目标飞行器,目标飞行器通过天基或者地基测控链路代传追踪飞行器的数据。其中,ISS代传追踪飞行器的数据主要为1.024 kbit/s的遥控和6.4 kbit/s的遥测数据,代传数据容量小。天宫一号目标飞行器代传神舟八号载人飞船的数据主要为前向的2.04 kbit/s遥控数据和返向20.4 kbit/s的关键遥测等数据,代传数据容量也较小。在空间站任务阶段的追踪飞行器和目标飞行器需要同时适应前向、后向、径向3种对接方式。其中,对于径向对接方式,追踪飞行器由于姿态从3轴对地正飞变为俯仰90°,并且受到目标飞行器对中继卫星波束的遮挡,测控覆盖率严重下降。为了保障双目标跟踪期间及径向交会对接期间追踪飞行器的测控链路可靠性和测控覆盖率,要求目标飞行器具备代传追踪飞行器的高带宽前向、返向数据的能力,具体包括代传追踪飞行器的前向遥控、返向遥测及图像话音的多媒体数据。相对于ISS及神舟八号任务期间的代传数据需求,本文提出的代传数据需求具有高带宽的特点。
1.2 相对测量的需求
相对测量信息是保证交会对接任务正常完成的必备条件,包括位置信息和轨道姿态信息。目标飞行器通过星间链路将自身位置信息发送给追踪飞行器,追踪飞行器根据自身位置信息和目标飞行器位置信息,按照相对定位算法实时计算出相对位置的最优解,为控制相对定位飞行过程提供输入。同时,目标飞行器通过星间链路将自身轨道姿态信息发送给追踪飞行器,追踪飞行器根据目标飞行器的轨道六根数、姿态角、姿态角速度、飞行段标志完成自身飞行策略的调整,实现精准交会对接。
ISS的交会对接任务期间,以及神舟八号至神舟十一号载人飞船的交会对接任务期间,采用GPS系统为主、格洛纳斯(GLONASS)系统为辅的相对测量手段。相对于ISS及神舟八号,本文考虑到北斗二号、三号的应用场景,为了提升交会对接任务的自主性和安全性,后续交会对接任务应当会采用以北斗系统为主的相对测量手段,因此本文设计的星间链路在支持GPS系统相对测量的基础上同时支持北斗系统的相对测量。
1.3 自主控制的需求
追踪飞行器根据自身状态,按照条件令的判据进行自主计算,得出对目标飞行器的控制信息,并通过星间链路发送给目标飞行器。自主控制信息包括相对导航敏感器根据相对导航距离及相对位置角度信息识别出来的工作模式切换,对接机构捕获、锁紧完成的信息,交会对接过程中平移靠拢时目标飞行器的太阳翼停控信息,组合体对接完成后的起控信息,以及组合体分离的分离开始信息。
ISS的交会对接任务期间,以及神舟八号至神舟十一号载人飞船的交会对接任务期间,采用地面控制为主、飞行器自主控制为辅的策略。为了提升交会对接任务的自主性和可靠性,工程总体提出后续交会对接任务采用自主控制为主、地面控制为辅的策略,因此要求星间链路支持自主控制数据的传输及应用层上面的自主控制策略的实现。
1.4 双向通话的需求
目标飞行器和追踪飞行器双向通话的需求包含2种工况。①目标飞行器和追踪飞行器均为有人状态,在交会对接过程中,目标飞行器内的航天员和追踪飞行器内的航天员通过星间链路完成双向通话。②目标飞行器为无人状态,追踪飞行器为有人状态,在交会对接过程中,地面通过地基或天基测控站主要跟踪目标飞行器,并且通过测控链路完成与目标飞行器的双向通话。同时,目标飞行器通过星间链路实现地面与追踪飞行器的双向通话。
在神舟八号至神舟十一号载人飞船的交会对接任务期间,目标飞行器为天宫一号目标飞行器和天宫二号空间实验室,只有1个前向对接口,同一时刻最多对接1艘载人飞船,因此不存在双向通话的需求。空间站任务阶段,天和核心舱共有1个前向对接口、1个径向对接口、1个后向对接口和2个侧向停靠口,支持同一时刻对接2艘载人飞船,存在追踪飞行器和目标飞行器同时有人并双向通话的需求。
1.5 小结
对上述分析归纳,支持空间站交会对接任务的星间链路需求包括代传数据、相对测量、自主控制和支持双向通话,详见表1。

表1 支持空间站交会对接任务的星间链路需求
2 星间链路设计
针对上文的需求分析结果,制定星间链路的网络分层架构模型,按照分层模型的设计思想分别从物理层、链路层和应用层开展设计。
从提升抗干扰能力和径向交会过程期间支持目标飞行器对追踪飞行器代传高带宽数据的角度出发设计物理层,包括星间链路的工作频率、调制方法和扩频/非扩频体制,使星间链路不仅具备向下兼容性,支持以往前向及后向交会对接任务,还满足径向交会对接任务的代传需求。同时,在前向、后向交会对接任务及径向交会对接任务的远距离相对飞行期间,采用扩频体制设计有效提升星间链路的抗干扰能力,适应地面及空间干扰信号日益增强的工作环境。
链路层规定了星间链路的传输帧结构和信道纠错编码。一方面,采用通用化的设计思想,设计适用于各种用户数据的通用化传输帧结构;另一方面,从抗干扰的角度出发,采用里德-所罗门(RS)编码,从链路层角度进一步提升星间链路的抗干扰能力。
应用层分别对各种用户数据的传输帧协议和自主控制策略开展设计。首先,根据任务需求,对交会对接任务期间的所有用户数据进行分析,并详细设计所有用户数据的应用层传输协议。为减少地面干预,提升交会对接任务的自主性,实现交会对接过程自主可控,设计应用层的若干自主控制策略。基于星间链路传输的各种数据,追踪飞行器和目标飞行器对数据按照自主控制算法进行分析和计算,并执行相应的动作,完成相应任务,最终实现全自主交会对接任务。星间链路系统设计见图1。
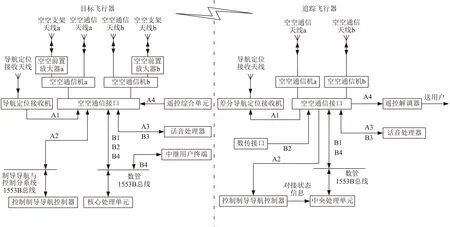
注:在目标飞行器发送信息中,A1为绝对定位数据,A2为控制关键状态数据,A3为任务话音,A4为代传遥控注入数据;在追踪飞行器发送信息中,B1为自主控制数据,B2为代传高带宽遥测及多媒体数据,B3为任务话音,B4为通过工程遥测代传对接段关键遥测数据。
2.1 物理层设计
追踪飞行器配置2台空空通信机[8-11]、2副空空通信天线和1个空空通信接口,空空通信接口内部双机热备份。目标飞行器配置2台空空通信机、1个空空通信接口、2副空空通信天线(布局在前向、径向对接口附近,前向与径向交会对接使用此天线)、2个空空前置放大器、2副空空支架天线(布局在后向对接口附近,后向交会对接使用此天线)。空空通信机完成基带信号处理及节点舱空空射频信号的放大,空空前置放大器完成资源舱空空射频信号的放大。目标飞行器空空通信天线切换指令仅影响射频接收通道;目标飞行器空空通信机与空空前置放大器的固态放大器具备独立开关的能力。星间链路的物理层可分为接收通道和发射通道两大功能部分,结构上各单元独立处理。为了保证射频模块的正常工作,设计时着重考虑接收、发射通道的隔离度和发射与接收模块的电磁兼容问题。接收通道和发射通道都设计有单独的本振单元,以防止信号间的串扰;同时,它们的射频信号采用了带外滤波设计。另外,射频模块对接收通道和发射通道在结构设计上实现物理上的隔离。星间链路物理层组成见图2。

图2 星间链路物理层组成
追踪飞行器至目标飞行器的空空链路可工作在扩频模式和非扩频模式,由追踪飞行器的空空通信机切换通信模式,目标飞行器的空空通信机自适应追踪飞行器切换。目标飞行器至追踪飞行器的空空链路只工作在扩频模式。其中,扩频工作模式应用于前向及后向交会对接过程,非扩频工作模式应用于径向交会对接过程。这种双工作模式的设计,既能提升远距离飞行期间星间链路的抗干扰能力,又能支持径向交会对接的近距离阶段,满足目标飞行器代传追踪飞行器的高带宽数据的需求。星间链路根据扩频模式和功率模式来调整发射功率,包含扩频大功率、扩频小功率、非扩频大功率和非扩频小功率4种模式,见图3。

图3 星间链路发射功率模式
星间链路工作在S频段,前向链路支持BPSK和QPSK调制方式,返向链路支持BPSK调制方式。扩频通信模式下,采用码分多址进行信号区分,空空通信机a与b采用不同的GOLD码,且互为热备份;追踪飞行器至目标飞行器的星间链路在非扩频通信模式下,追踪飞行器仅1台空空通信机固态放大器开机,另外1台空空通信机固态放大器关机,可作为冷备份设备。星间前向链路和返向链路的物理层原理分别见图4和图5。

图4 星间前向链路物理层原理

注:AD为模拟数字转换;NCO为数控振荡器;FIR为有限脉冲响应;PN为伪随机码。
同一个飞行器的2副空空通信天线采用不同的极化方式区分,空空通信天线a极化方式为左旋圆极化,空空通信天线b为右旋圆极化,两者之间采用极化隔离设计。目标飞行器和追踪飞行器的空空通信机和空空通信天线均可配对使用。每个空空通信接口能同时接收空空通信机a和空空通信机b的数据和状态遥测参数,根据接收到的遥测参数及数据帧同步字判断空空通信机a和b的工作状态是否正常。若均为正常状态,优先选择把空空通信机a的数据送往用户。星间链路物理层设计见表2。
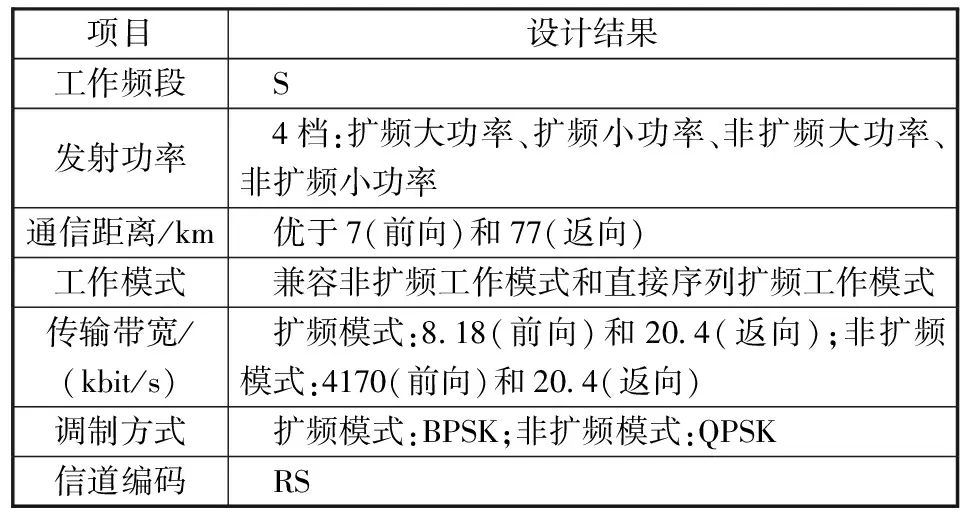
表2 星间链路物理层设计
2.2 链路层设计
为增强信道的抗干扰能力,空空通信机采用RS编码对信道传输的误码进行控制,帧头不参与编码。目标飞行器至追踪飞行器的空空数据包设计帧长为6×64 bit,其中:帧头长12 bit;数据6×48 bit;采用RS(62,48)校验码,每个符号6 bit。每组数据含48个符号、14个校验符,能够检测不大于14个错误的符号,可纠正6个符号错误。星间链路的RS编码后链路层传输帧格式如表3所示,目标飞行器至追踪飞行器的链路层传输帧如表4所示,追踪飞行器至目标飞行器的链路层传输帧如表5所示。I支路、Q支路和话音数据为码流,只有1种帧头;控制关键状态数据、自主控制数据和对接段关键遥测数据,单帧数据需要拆分成2帧空空数据帧传输,分别设计起始帧和结束帧2种帧头;定位数据和遥控数据的单帧数据需要拆分成大于2帧的空空数据帧传输,分别设计起始帧、中间帧和结束帧3种帧头。

表3 星间链路的RS编码后链路层传输帧格式
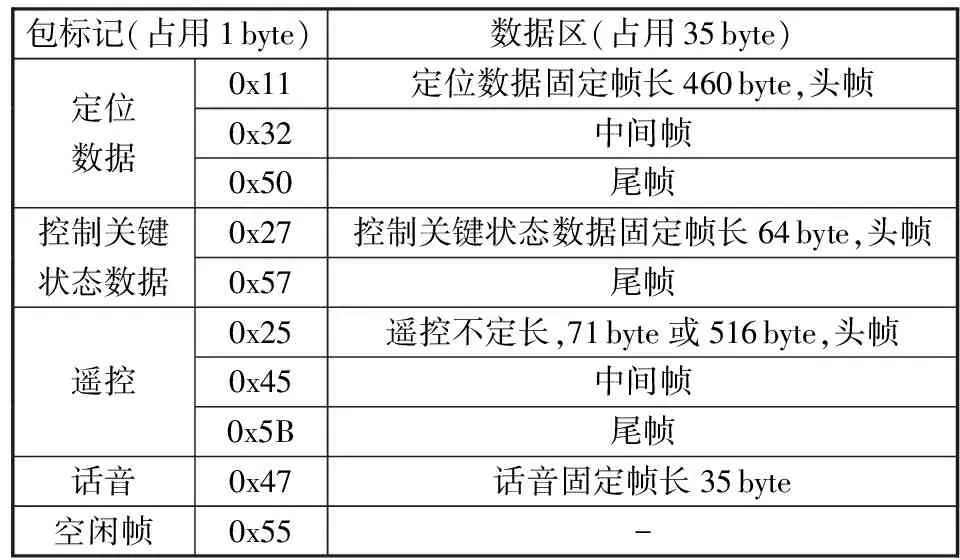
表4 目标飞行器至追踪飞行器的链路层传输帧

表5 追踪飞行器至目标飞行器的链路层传输帧
2.3 应用层设计
2.3.1 应用层传输协议设计
应用层传输协议是所有用户数据在星间链路应用层上的传输规范。根据传输方向,分为目标飞行器至追踪飞行器和追踪飞行器至目标飞行器的应用层传输协议。目标飞行器至追踪飞行器的应用层传输协议,包括绝对定位数据、控制数据、遥控数据和话音数据。追踪飞行器至目标飞行器的应用层传输协议,包括自主控制数据、代传I支路和Q支路数据、关键遥测数据及话音数据。
(1)目标飞行器发送给追踪飞行器的绝对定位数据。目标飞行器导航定位接收机周期性生成全球导航卫星系统(GNSS)绝对定位数据,目标飞行器将表4中的定位数据透明传输至追踪飞行器,追踪飞行器将导航定位接收机定位数据发送差分导航定位接收机完成相对定位解算。
(2)目标飞行器发送给追踪飞行器的控制数据。目标飞行器制导导航与控制分系统周期性生成1帧控制关键状态数据,目标飞行器将表4中的控制关键状态数据透明传输至追踪飞行器,追踪飞行器通过星间链路接收的数据发送给制导导航与控制分系统。
(3)目标飞行器代传追踪飞行器的遥控数据。对于地面上行并通过目标飞行器转发追踪飞行器的遥控指令和注入数据,由星间链路发送至追踪飞行器再由追踪飞行器的遥控解调器译码后发送到各用户执行。目标飞行器转发追踪飞行器的遥控指令或注入帧格式的流程,与直接从地面上行至追踪飞行器一致。
(4)目标飞行器和追踪飞行器的双向话音数据。追踪飞行器和目标飞行器之间双向透明传输话音数据。当星间链路传输的话音与地面上行的话音重合时,话音处理器混音后送航天员头戴。
(5)追踪飞行器发送给目标飞行器自主控制数据。追踪飞行器发送给目标飞行器的对接状态数据为追踪飞行器制导导航与控制分系统产生的自主控制数据,由追踪飞行器按照注入格式打包发送至目标飞行器。
(6)追踪飞行器向目标飞行器传送I支路和Q支路数据。由于径向对接时目标飞行器舱体对追踪飞行器测控链路存在遮挡,近距离(2个飞行器相对距离450 m内)时追踪飞行器的遥测、图像、话音数据通过目标飞行器代传下行。追踪飞行器将I支路和Q支路数据透明传输至目标飞行器。目标飞行器接收后,通过中继Ka频段单址(KSA)链路下行地面。
(7)追踪飞行器向目标飞行器传送对接关键遥测数据。对接过程中目标飞行器停控期间,目标飞行器窄波束中继链路可能存在中断,径向对接目标飞行器舱体对追踪飞行器测控链路存在遮挡,追踪飞行器对接过程的故障处置所需的遥测参数通过星间链路发送目标飞行器,由目标飞行器通信链路下行地面。交会对接期间,追踪飞行器将代传关键遥测数据发送给目标飞行器。
2.3.2 应用层自主控制策略设计
应用层自主控制策略是一个飞行器根据自身及通过星间链路接收到的另外一个飞行器的相关信息,从而实现自主控制的策略。通过应用层自主控制策略的设计,实现交会对接过程中自主控制为主、地面控制为辅的目的。应用层自主控制策略包括目标飞行器前向和后向空空通信天线的切换策略、星间链路工作模式及发射功率的切换策略,以及激光雷达远近场的切换策略。
(1)目标飞行器前向和后向空空通信天线切换策略(见图6)。目标飞行器分别在节点舱与资源舱配置1副天线,追踪飞行器在前向交会和径向交会或径向绕飞过程中,在天和核心舱2副空空通信天线的交叠区进行切换,切换指令由自主指令与地面遥控发出。目标飞行器参考空空通信天线的布局和视场,根据追踪飞行器飞行位置,当θ>60°时,给出资源舱切换至节点舱天线标志。其中,θ为目标飞行器空空支架天线视场俯仰角,0°基准为天线轴向,顺时针方向角度为正,逆时针方向角度为负。由节点舱天线切换至资源舱天线是由地面判断发令切换。
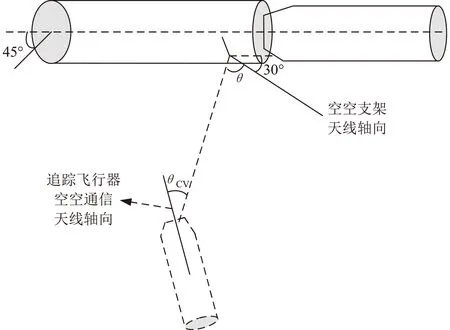
注:θCV为追踪飞行器天线视场俯仰角,0°基准为天线轴向,顺时针方向角度为正,逆时针方向角度为负。
(2)星间链路工作模式及发射功率切换策略(见图7)。默认情况下,前向、后向对接对应扩频模式,径向对接对应非扩频模式,扩频模式和非扩频模式可通过地面注入设定。在扩频模式,2个飞行器相对距离小于300 m(质心坐标系相对距离)时,制导导航与控制分系统将切换至小功率置为有效,在接近段或撤离段且2个飞行器距离大于400 m时,制导导航与控制分系统将切换至大功率置为有效。在非扩频模式,2个飞行器相对距离小于80 m(对接口坐标系相对距离)时,制导导航与控制分系统将切换至小功率置为有效,在接近段或撤离段且2个飞行器距离大于100 m时,制导导航与控制分系统将切换至大功率置为有效。

图7 星间链路工作模式及发射功率切换策略
(3)激光雷达远近场切换策略。在交会对接过程中,激光雷达初始状态为切换至远场目标,当2个飞行器对接口坐标系相对距离小于68 m时,制导导航与控制分系统将切换至近场目标;制导导航与控制分系统进入组合体停靠后,将激光雷达初始化为近场目标;当执行组合体撤离任务、追踪飞行器飞行到相对目标飞行器200 m时,置为切远场目标。
3 在轨验证
3.1 神舟十二号载人飞船前向交会对接
神舟十二号载人飞船在轨完成与天和核心舱的前向交会对接,星间链路采用扩频模式通信,链路正常建立,基于星间链路的神舟十二号载人飞船与天和核心舱之间的双向信息流正常运行。交会对接期间,神舟十二号载人飞船空空通信机加电,建立与天和核心舱的星间链路,加电后至对接完成锁紧完成期间同步指示和接收信号强度指示如图8所示(北京时间2021年6月17日)。神舟十二号载人飞船与天和核心舱之间星间链路的前向链路建立的基线距离为42 km,返向链路建立的基线距离为143 km,优于前向和返向通信距离分别为7 km与77 km的要求。在扩频模式,神舟十二号载人飞船与天和核心舱相对距离小于300 m(质心坐标系相对距离)时,制导导航与控制分系统将切换至小功率置为有效,两者的工作模式均从扩频大功率切换为扩频小功率。在15:26,接收信号强度指示值由4.2 V变为3.7 V,表示天和核心舱的空空通信机根据相对距离变化自动切换至小功率。同时,神舟十二号载人飞船空空通信机的发射功率遥测显示,当前工作模式从大功率切换为小功率。

图8 星间链路同步指示和接收信号强度指示
3.2 神舟十三号载人飞船径向交会对接
神舟十三号载人飞船在轨完成与天和核心舱的径向交会对接,星间链路采用非扩频模式通信,链路正常建立,基于星间链路的神舟十三号载人飞船与天和核心舱之间的双向信息流正常运行。神舟十三号载人飞船与天和核心舱之间星间链路的前向链路建立的基线距离为40 km,返向链路建立的基线距离为127 km,优于前向和返向通信距离分别为7 km与77 km的要求。期间,神舟十三号载人飞船空空通信机a切换至非扩频工作模式,与天和核心舱空空通信机a建立稳定双向链路。在非扩频模式,成功通过星间链路代传768 kbit/s的图像数据和768 kbit/s的遥测数据,代传图像见图9。

图9 径向交会对接模式下的星间链路代传图像
在非扩频模式,神舟十三号载人飞船和天和核心舱的相对距离小于80 m(对接口坐标系相对距离)时,制导导航与控制分系统将两者的发射功率成功切换为小功率。
3.3 小结
对ISS、神舟八号载人飞船,以及应用本文设计的神舟十二号、十三号载人飞船的在轨试验数据,进行分析比对,见表6。可见,本文设计具有通信距离远、抗干扰能力强、传输带宽高和支持径向交会对接工作模式的优点。
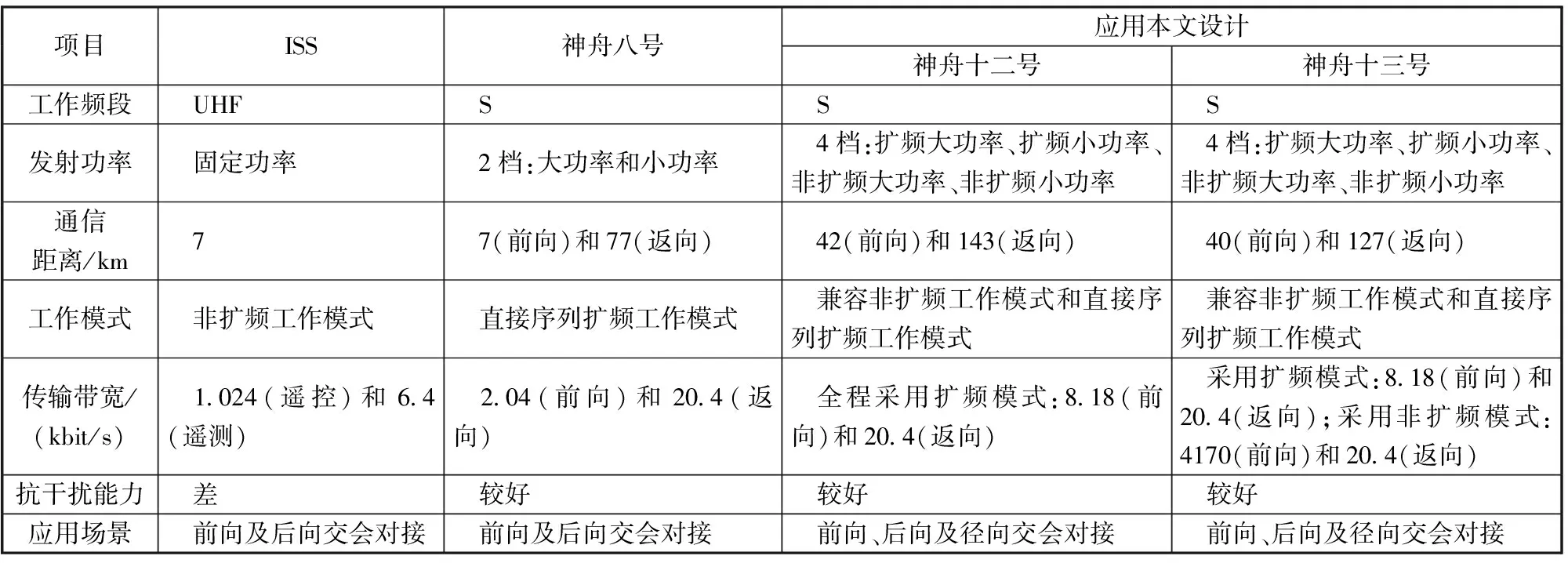
表6 星间链路在轨试验结果分析
4 结束语
本文对交会对接任务中追踪飞行器和目标飞行器的星间链路需求进行分析,并根据需求完成星间链路的物理层、链路层和应用层的设计。该设计能实现交会对接过程中目标飞行器代传追踪飞行器重要数据,解决追踪飞行器由于姿态调整及视场遮挡导致的测控覆盖率下降问题;实现追踪飞行器根据目标飞行器的绝对位置信息完成相对导航定位功能,为追踪飞行器完成交会对接段飞行提供重要参考信息;通过星间链路实现2个飞行器对接过程中的自主控制,在地面不干预的情况下具备完成自主交会对接的能力,提升交会对接任务的可靠性。本文设计支持返向20.4 kbit/s、前向扩频模式下8.18 kbit/s和非扩频模式下4170 kbit/s的有效数据传输带宽,支持前向7 km和返向77 km的稳定通信距离,具备较强的抗干扰能力,设计成果已经成功应用于空间站任务。
