风速对小型旋翼无人机螺旋桨的影响分析
2022-11-16孙毅刚刘永臻单泽众刘聪盛文泰
孙毅刚, 刘永臻, 单泽众*, 刘聪, 盛文泰
(1. 中国民航大学航空工程学院, 天津 300300; 2. 中国民航大学空中交通管理学院, 天津 300300)
随着无人机(unmanned aerial vehicle,UAV)技术的快速发展,被广泛应用在各个领域,如航测、巡检、消防、机器视觉[1]等代替人类执行危险复杂的任务,极大地提高工作质量及工作效率,降低了执行任务危险性。并且随着技术的提高,无人机在城市中的应用,尤其在智慧城市的建设中扮演着重要的角色。然而,随着无人机的应用数量逐渐增加,其事故率也在逐渐增加,所以在未来的研发过程中,需对无人机进行更加深入的研究,以便提高其适航能力[2-3]。
动力系统是影响无人机运行的重要因素之一,也是研发设计过程考虑的关键因素之一[4]。在无人机研发设计的过程中,不仅需要为无人机选择合适的动力系统搭配方案,更需要能够详细了解动力系统的详细参数,以便研发者可根据参数信息对飞控或结构进行参数调节[5]。此外,遇到突发情况,详细的参数更有助于撰写应急预案,降低无人机的损失以及减少无人机对人员的伤害。
国内外学者已经针对旋翼的气动特性进行了一定的研究。其中,刘士明等[6]通过计算流体力学(computational fluid dynamics,CFD)与试验的方法研究了转速的变化对旋翼的气动特性的影响;杨海涛等[7]研究了旋翼对机翼的气动特性的干扰;王艳冰等[8]基于风洞试验与计算流体力学,模拟了无人机飞行状态下来流风速对拉力、扭力的影响;段登燕等[9]对变距动力系统进行研究,根据不同运行状态通过模糊比例-积分-微分(proportion-integration-differentiation,PID)控制实时控制转速、优化桨距,以实现最小拉力控制,验证了变螺距螺旋桨比定螺距螺旋桨具有更高的效率;刘聪等[10]分析了不同侧风作用下,悬停状态的无人机旋翼气动特性;刘诗鸾等[11]分析了变距旋翼在前飞时不同转速、桨距角下的气动特性;姬乐强等[12]应用CFD和动量源方法分析了涵道设计参数对气动特性的影响,对设计参数进行优化。
基于上述研究现状可知,针对常规螺旋桨、变距螺旋桨进行优化设计与测试研究,但仍尚不完善,针对小型旋翼无人机螺旋桨的气动特性进行分析,研发过程中所需的不仅是拉力、扭力,更需要桨力效、轴功率、电机效率、系统力效等参数,其中桨力效可用于评估能量转换效率,电机效率可用于评估动力系统性能,系统力效可用于评估电机与螺旋桨的匹配程度,轴功率可以评估单位时间内的做功。所以全面分析风速对动力系统参数的影响,更有利于为无人机选择合适的动力系统方案,以及更加准确地评估无人机的飞行性能。
为此,现选取典型动力系统,通过风洞试验仪器获取其详细的性能参数,研究来流风速对参数的影响,并对螺旋桨进行逆向三维建模,通过CFD数值分析,与试验进行对比,验证其一致性。通过详细研究风速对小型旋翼无人机螺旋桨参数的影响,不仅可为研发提供有力的支持,更能对其适航验证提供大量的参考数据。以期为设计精确稳定的飞控系统,保证微型旋翼无人机运行安全提供依据。
1 试验分析
1.1 试验过程
为研究无人机运行过程中来流风速对动力系统的影响,试验过程采用中国民航大学风洞试验仪器设备,如图1所示。试验段的尺寸为1.6 m×1.2 m×3.75 m,风速范围2~50 m/s,气流偏角≤0.5°,湍流度≤0.2%,可满足绝大部分小型飞机的试验。

图1 中国民航大学风洞试验仪器
测试平台为中国民航大学自主研发的动力数据采集平台,拉力测量模块精度为(0.05%F.S.±30) g,扭矩测量模块精度(0.05%F.S.±0.02) N·m,换相转速测量模块精度(0.5%F.S.±20) r/min,F.S.表示满量程,如图2所示,其最大测量拉力可达300 N。
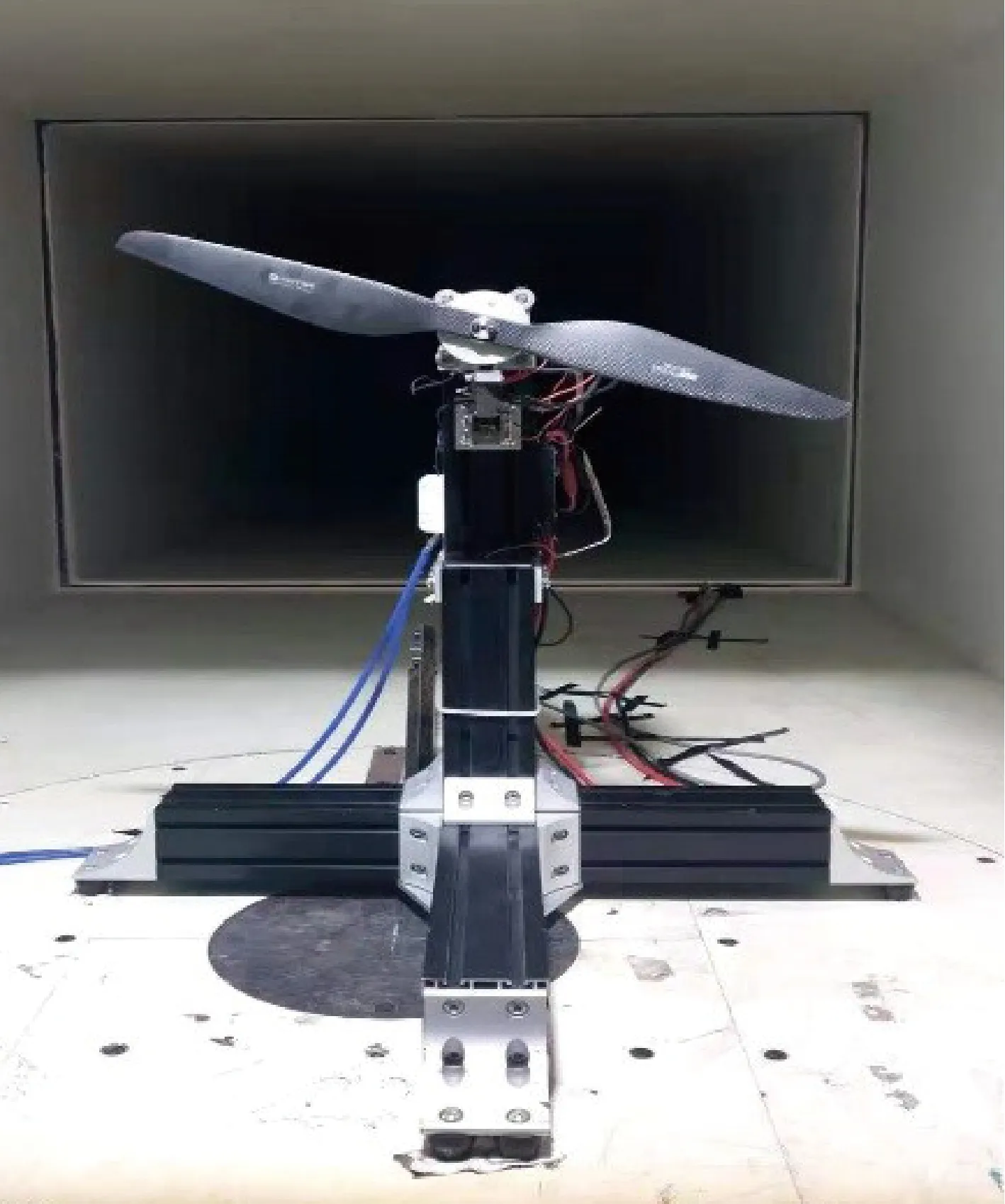
图2 无人机动力测试系统
选择较为典型的动力系统方案,其中电机型号为MN601-S,其Kv值(输入电压每增加1 V,无刷电机空转转速增加的转速)为170 r/(min·V),螺旋桨的型号为T-MOTOR 22×6.6 L。采用开关电源以模拟6S电池,设置电压为47 V。风洞模拟风速为0~15 m/s,数据间隔为2.5 m/s,初始转速为900 r/min,以300 r/min为增量,直至获取转速最大转速的性能参数。
1.2 试验结果
经过试验,获取无人机动力系统数据,选择3种典型风速,分别为0、5、15 m/s,如表1~表3所示。
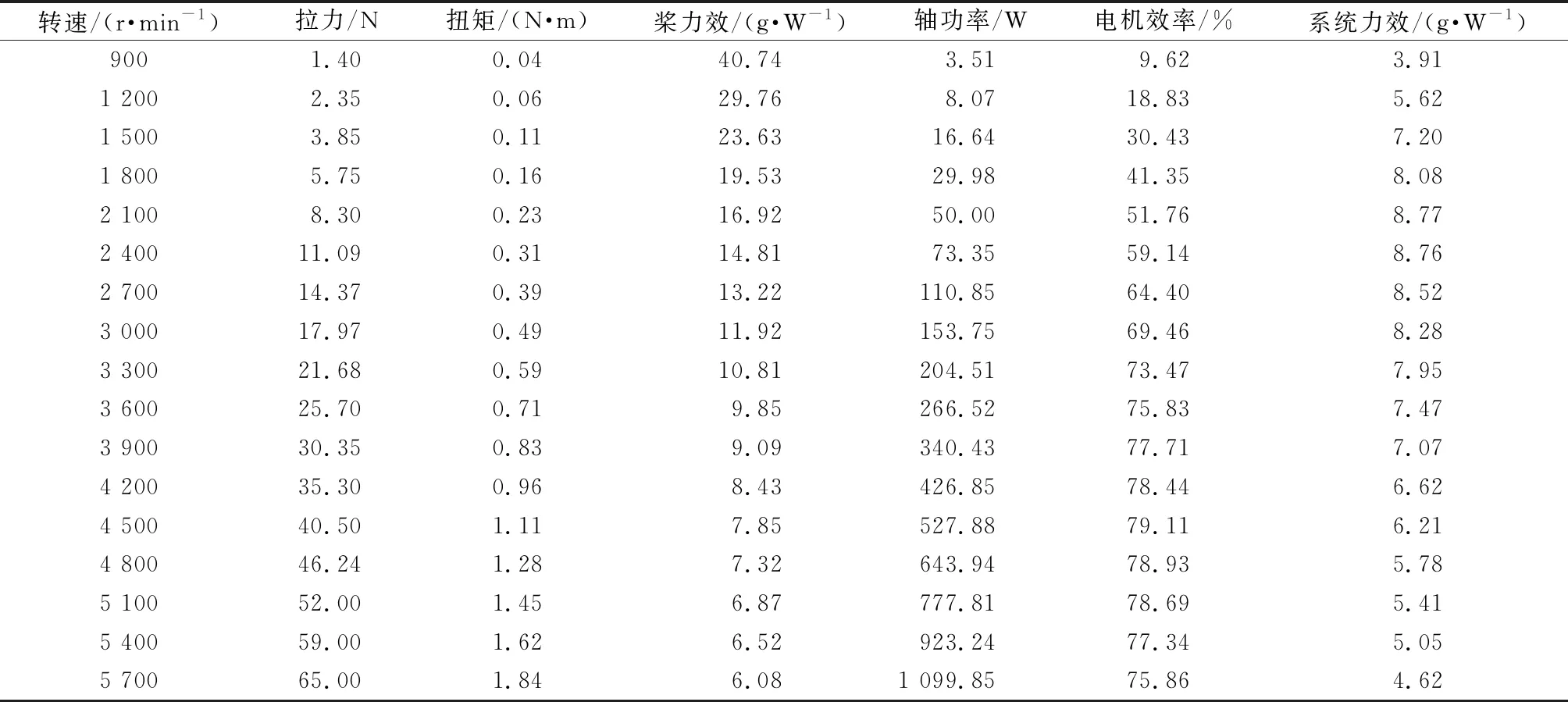
表1 无风状态下动力系统风洞试验数据
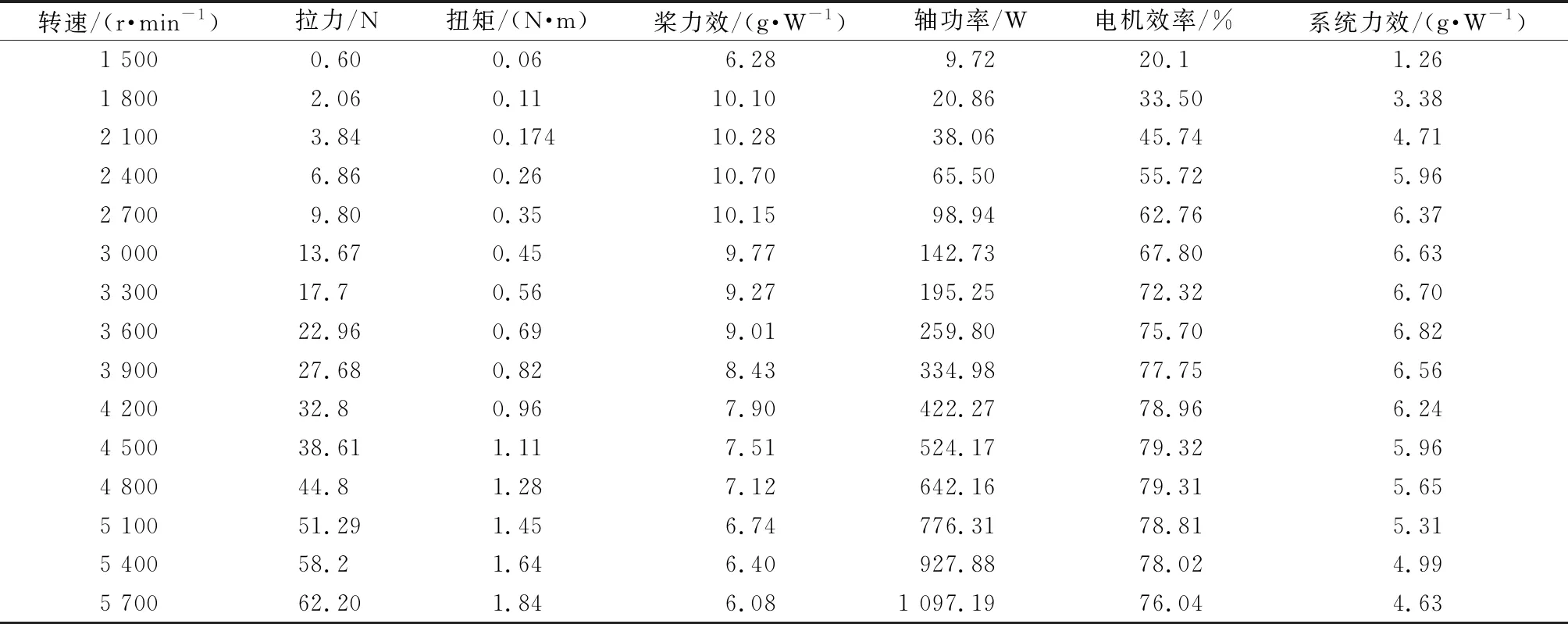
表2 5 m/s风速下动力系统风洞试验数据

表3 15 m/s风速下动力系统风洞试验数据
1.3 结果分析
1.3.1 转速对动力系统的影响
在来流风速不变的情况下,分析转速与动力系统参数的关系曲线,如图3所示,分别为5、10、15 m/s的分析结果。可以看出,图3(a)、图3(b)是在相同的风速作用下,螺旋桨的转速对拉力、扭矩的影响。随着螺旋桨转速的增加,其拉力、扭矩逐渐增大,且拉力值与螺旋桨的转速接近线性变化。而且风速每增加2.5 m/s,螺旋桨增加600 r才会产生正拉力。为此,可发现相同的动力系统,螺旋桨转速与来流风速对其的阻力变化值影响较小,而随着风速的增加,其产生的阻力变化斜率是增加的,所需转速也随之快速增加。
图3(c)、图3(d)是相同的风速作用下,螺旋桨的转速对轴功率、电机效率的影响。其中轴功率是动力系统的输出量,而电机效率是轴功率与动力系统总功率的比值,电机效率越大,证明动力系统的效能利用率越好。从图3(c)可知,其随着转速逐渐增加,轴功率成指数增加,相同的转速,风速越小其输出的轴功率越大。但从图3(d)效能利用率可知,随着转速的增加,其值缓慢增加然后快速下降,且风速越大,效能利用率越大。为此,可发现虽然风速越小,产生的阻力越小,轴功率越大,但是整体能量利用率却逐渐下降。
图3(e)是相同的风速作用下,螺旋桨的转速对桨力效的影响。其随着转速的增加,桨力效先增加后下降。其中,当风速为5 m/s时,转速增加300 r/min,桨力效降低了0.38 g/W,为此可知,当遇到无人机遇到紧急危险情况的时候,动力系统加大转速,由于桨力效降低,依然存在坠机的风险,且运行速度越小越危险。
图3(f)是相同的风速作用下,螺旋桨的转速对系统力效的影响。其随着转速的增加,系统力效先增加后减少,其中,当风速为5 m/s时,其最大值是最小值的1.22倍。为此,无人机运行过程中转速是影响动力系统搭配方案关键因素之一,不同运行环境下,相同的电机与螺旋桨未必是最优的搭配方案。
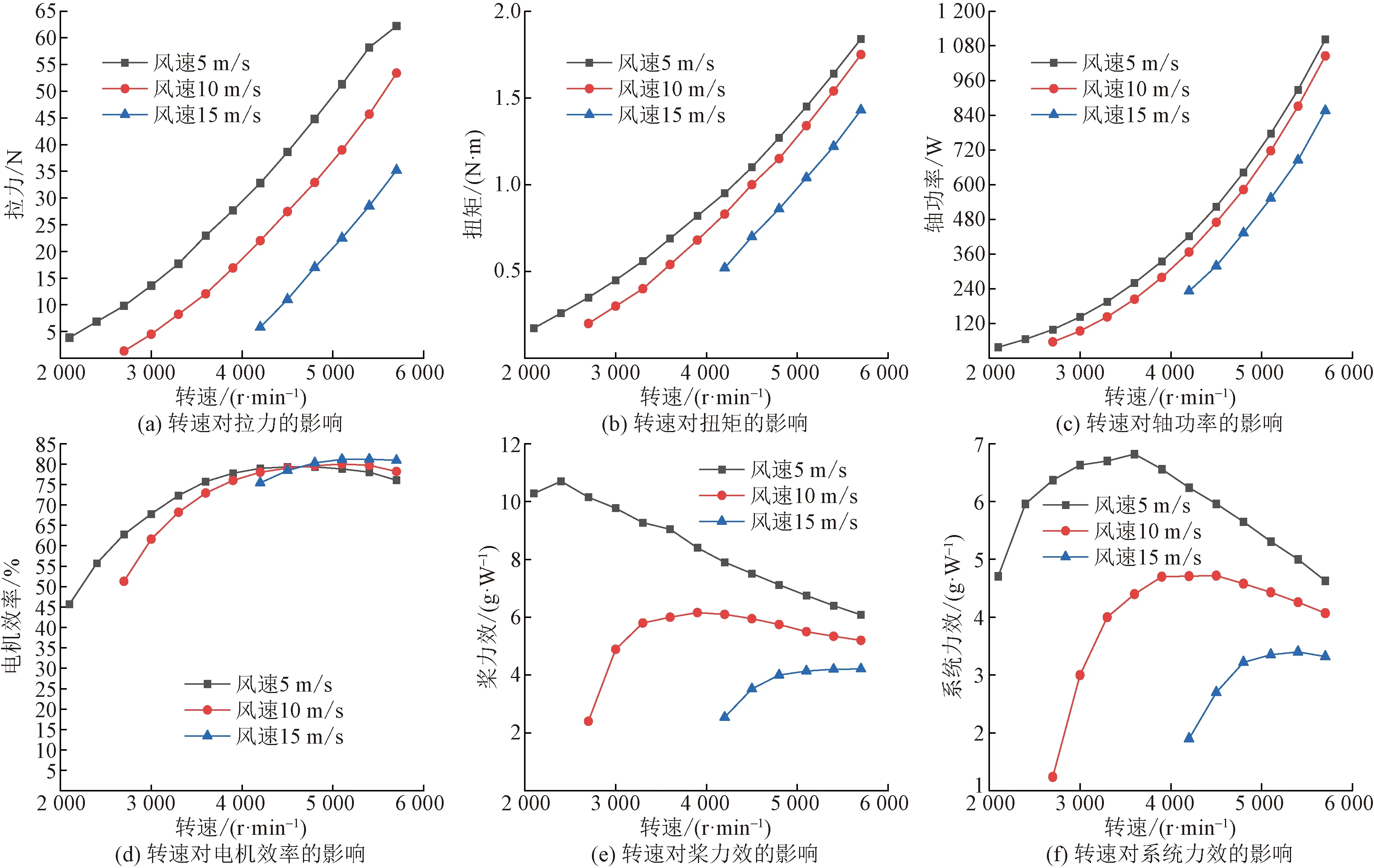
图3 转速对动力系统参数的影响
1.3.2 风速对动力系统的影响
在相同的转速影响下,分析风速与动力系统性能参数的关系曲线,如图4所示,分别取动力系统转速为4 800、5 100、5 400、5 700 r/min。
图4(a)、图4(b)分别为风速与螺旋桨的拉力、扭矩的关系曲线,在相同的转速5 700 r/min影响下,其0 m/s的风速产生的拉力是17.5 m/s的1.95倍。为此,当动力系统产生拉力相同,无人机飞行速度越快,所需的转速越高,若以地面性能参数衡量高速飞行状态下的数据,将对无人机飞行安全造成极大的威胁。扭矩与拉力受风速影响的原理相同。
图4(c)、图4(d)分别为风速与轴功率、电机总功率影响关系曲线,可知,随着风速的增加,其轴功率、电机总功率值在逐渐减少。分析其原因,当转速不变时,螺旋桨产生的拉力是固定的,随着来流风速的增加,即飞行速度增加,合成后的拉力增大,导致螺旋桨迎角变小,从而对螺旋桨产生的拉力有较大影响,拉力、扭矩的下降导致轴功率减小。
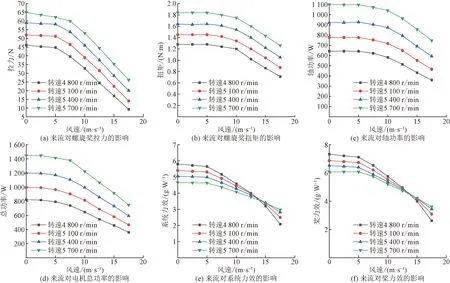
图4 来流风速对动力系统参数的影响
图4(e)、图4(f)分别为风速与系统力效、桨力效影响的关系曲线,并且可发现不同的转速,其随着风速的增加,数值变化幅度不同。转速越小,其受风速影响越大,其中对于4 800 r/min的转速,风速从0 m/s增加到17.5 m/s,系统力效降低了2.79倍,桨力效降低2.78倍,为此,静止状态下的数据并不能代表此电机与螺旋桨在运行过程中具有良好的搭配度。此外,图4(e)、图4(f)各曲线相交于12.5~15 m/s的范围内,为此,可知风速对系统力效与桨力效影响具有临界值的,当小于12.5 m/s时,转速越大,动力系统性能越好;当大于15 m/s时,转速越大,动力系统性能越差。
2 螺旋桨数值模拟
2.1 湍流模型
针对常用的动力系统搭配方案,选择多重参考系模型对螺旋桨进行分析,湍流模型选择k-ε的重整化群(renormalization group,RNG)模型。相比于标准k-ε模型,其对湍流黏度进行了修正,考虑流动中旋转以及旋转流动的影响,RNG模型在其ε方程中增加了一项,提高了高速流动的准确性。RNG模型考虑了涡流对湍流的影响,提高了旋涡流动的精度。这些特性使得RNGk-ε模型比标准k-ε在更广泛的流动中更准确和可靠。
如式(1)、式(2)所示,分别为湍动能k方程与湍流耗散率ε方程。
(1)
(2)
(3)

(4)
(5)
(6)
(7)
式中:ρ为流体密度;ε为湍流耗散率;k为湍流动能;t为时间;μ为流体动力黏度;Gk为由于平均速度梯度引起的湍流动能;μt为湍流黏度系数;η为湍流时间尺度与平均流时间尺度之比;Eij为应变率张量。
模型常数分别为C1ε=1.42,η0=4.377,β=0.012,Cμ=0.084 5,C2ε=1.68,αk=αε=1.39。
湍流动能k与耗散率ε的湍流普朗特数分别为σk=1.0,σε=1.3,μeff=μ+μt。
2.2 结果分析
针对试验采用的T-MOTOR的22 in螺旋桨(1 in=2.54 cm)进行逆向工程,扫描获取三维模型,利用ICEM软件分别对螺旋桨的旋转区域(即旋转域)以及周围流场(即静域)进行网格划分,其中为增加分析的准确程度,针对旋转域进行网格加密处理,划分后的网格数量为3 200 000个,如图5所示。
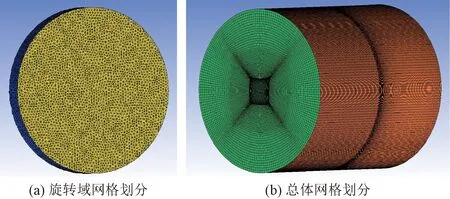
图5 网格划分结果
为分析不同来流下螺旋桨气动特性变化的原因,选取了0、5、15 m/s下同转速的压力分布,如图6所示,可知气流速度的变化导致桨叶表面压力分布的变化,在桨70%~90%处,桨的压力系数增大,使流场发生变化,如图7所示,随着风速的不断增加,对桨本身产生较大的影响,同时,来流越大,桨的迎角相对变小导致升力减少。
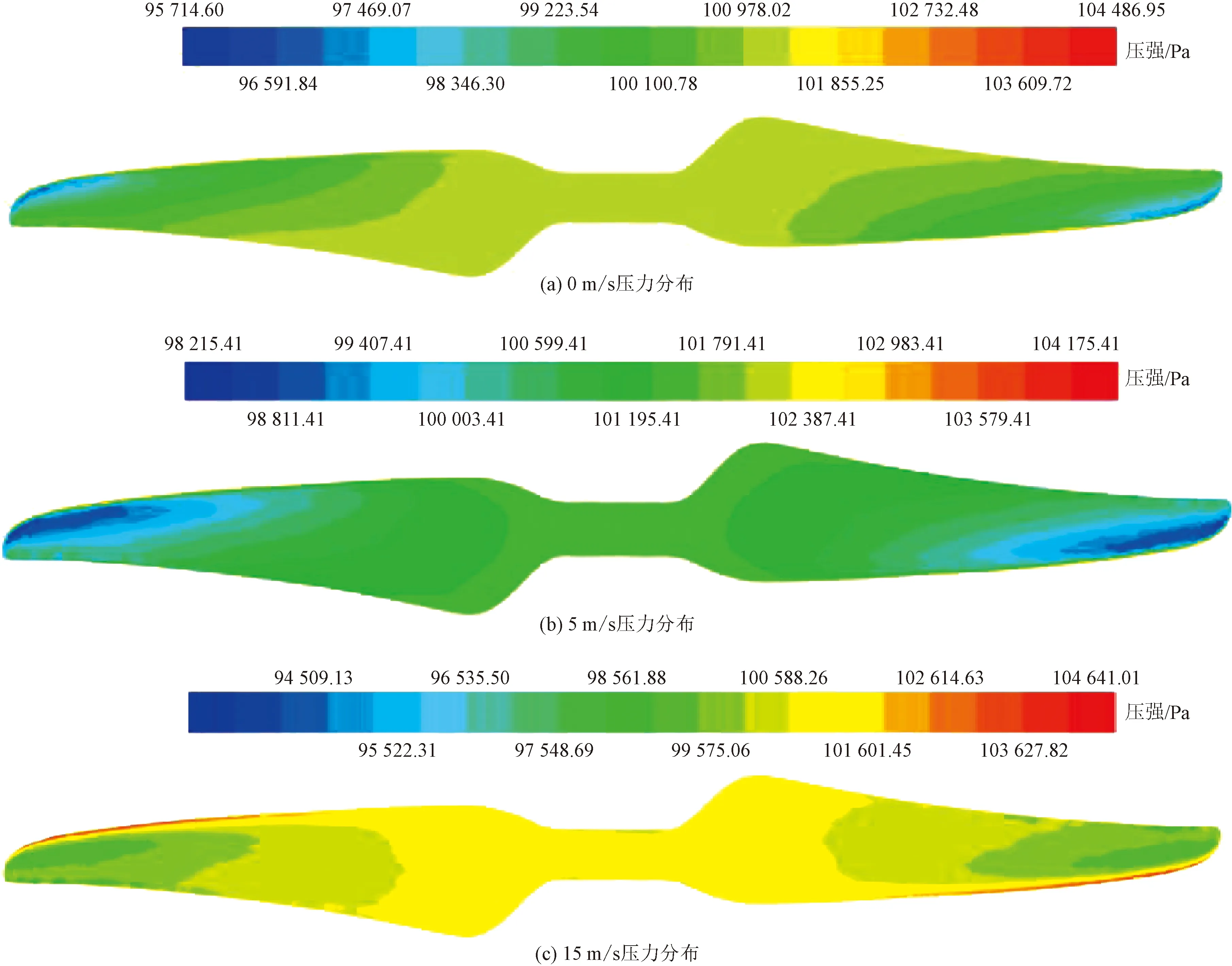
图6 不同风速螺旋桨压力分布
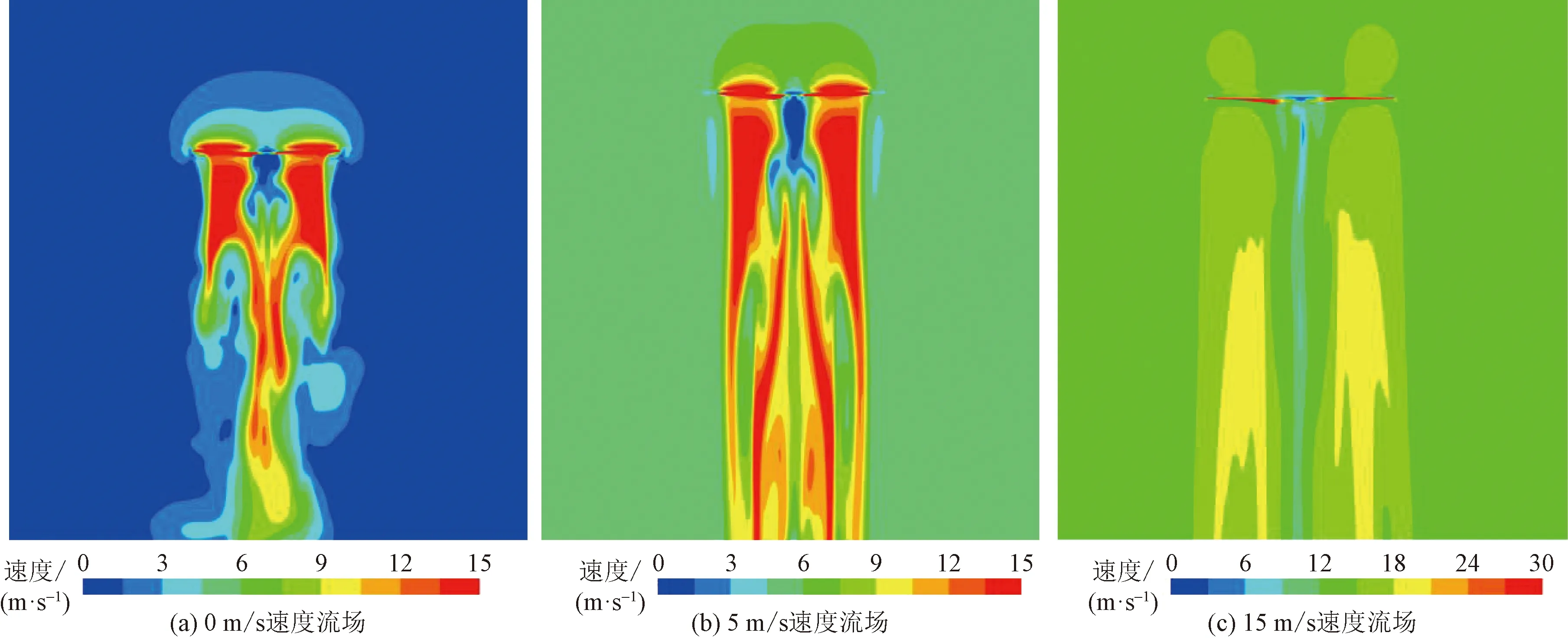
图7 不同风速螺旋桨速度流场分布
2.3 CFD数值模拟与风洞试验对比
2.3.1 静态对比分析
在风速为0 m/s时比较了螺旋桨在不同转速下的气动数据,如图8所示。试验值整体略大于仿真值,其中在5 700 r/min时,其误差值最大,为8.8%,随着转速增加,误差有所增加,但保持在10%范围内,扭矩误差在5%的范围内,风洞试验与CFD数值模拟在来流静态时具有较好的一致性。
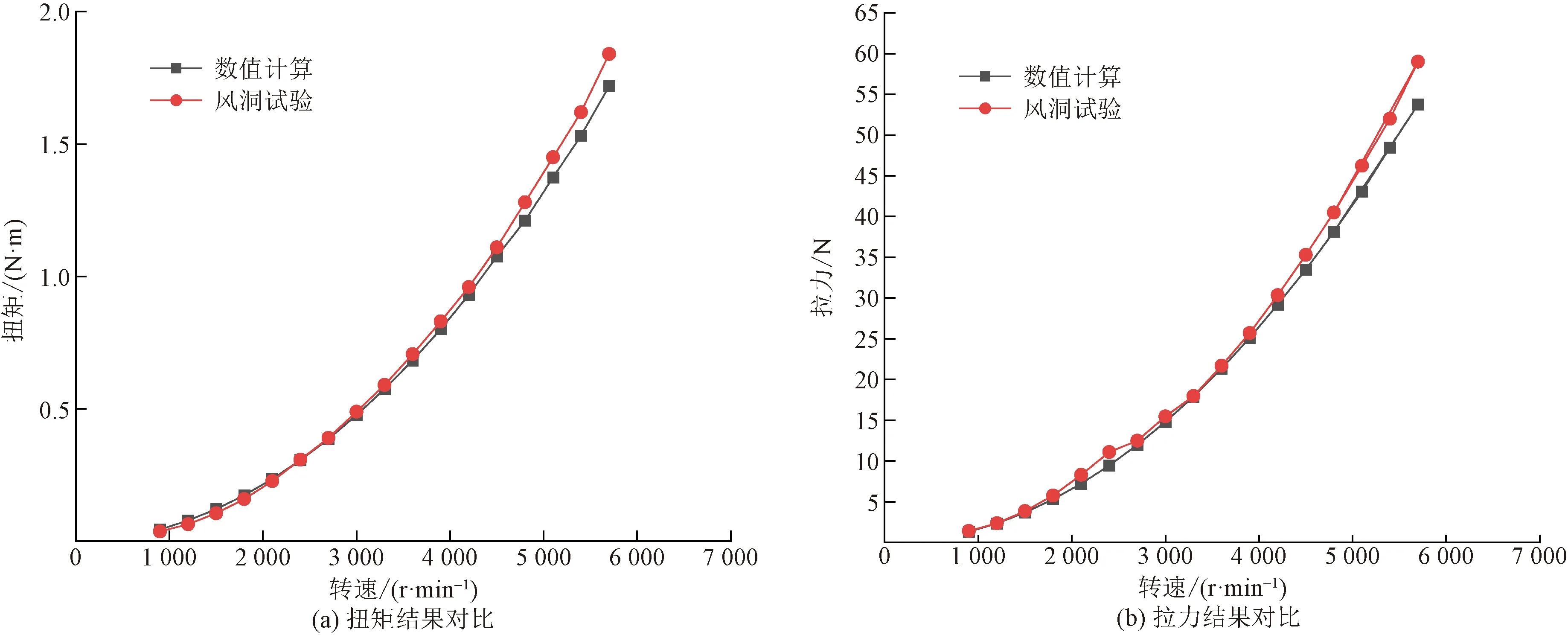
图8 数值模拟与试验结果对比
2.3.2 动态对比分析
选取了来流风速在7.5 m/s时的拉力与扭矩,进行了数值模拟与风洞试验对比,如图9所示。相比于静态数据对比,动态数据的误差较大,但是其变化趋势仍保持一致。此外,随着转速的增加,误差有所增大,在转速最大时拉力误差最大为12.2%,扭矩偏差最大为4.8%,在5%以内,验证了模型的准确性。
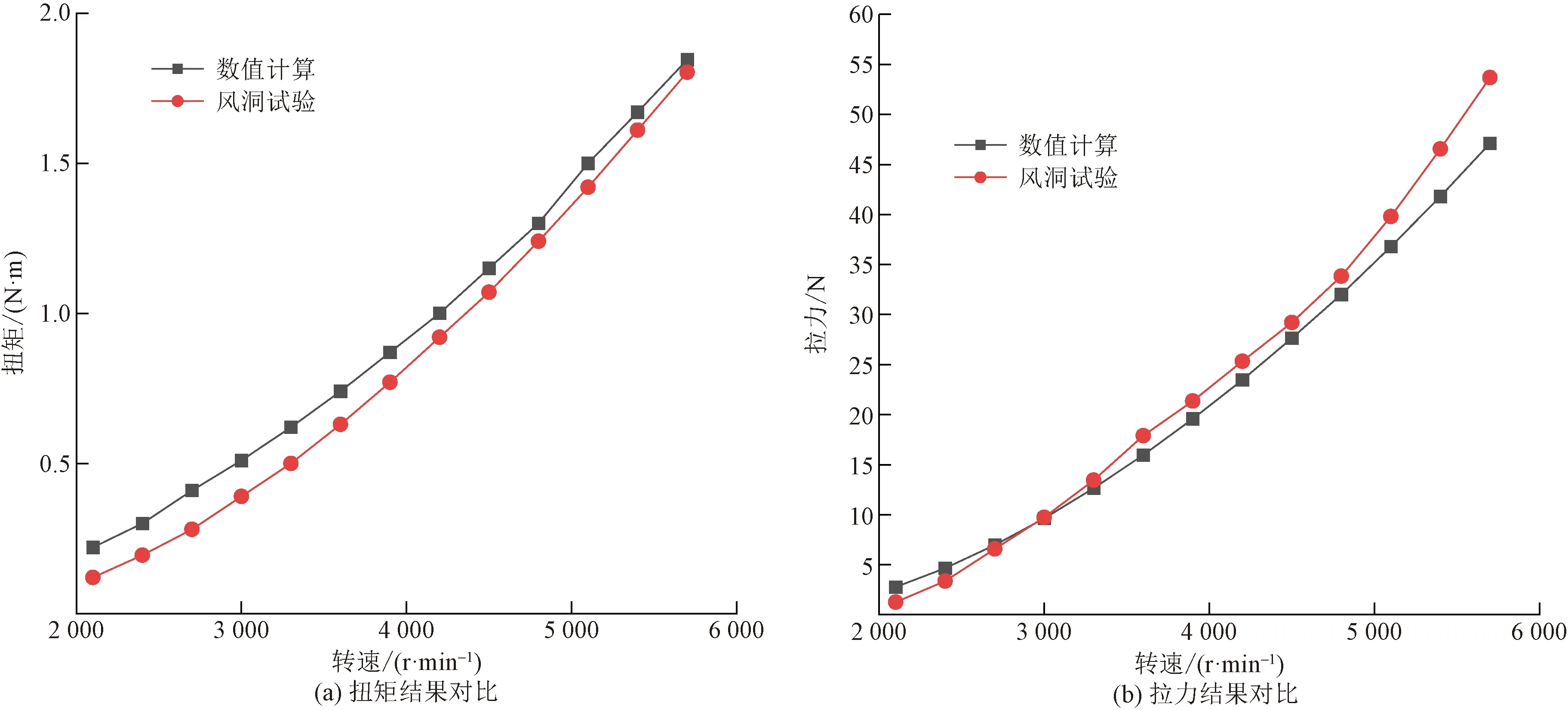
图9 数值模拟与试验结果对比
3 结论
(1)选择常用的无人机动力系统搭配方案,通过风洞试验获取其拉力、扭矩、系统效率等参数,通过分析可得,风速与转速是影响小型旋翼螺旋桨的重要因素,其中,随着转速的增加,拉力、扭矩、轴功率逐渐增大,系统效率、桨力效、系统力效先增加后减少;随着风速的增加,迎角变小,桨的升力逐渐降低。
(2)基于多重参考坐标系的k-ε的RNG模型,对无人机动力系统进行气动分析,分析结果显示CFD分析结果与试验结果趋势保持一致。动态误差略大于静态误差,拉力误差在13%以内,扭矩误差在5%以内,验证了该模型对小型旋翼螺旋桨的适用性,可为小型旋翼无人机的适航分析提供参考。
(3)通过数值模拟下的螺旋桨的压力分布可以获取不同弦长的压力系数与该弦长处的流场分布情况,可以结合螺旋桨的流场分布与涡流分布对小型旋翼螺旋桨进行优化,提升螺旋桨的性能。
