水体分层监管无人船的关键技术研究
2022-11-12陈玲孟巧高洁
陈玲 孟巧 高洁
(南通理工学院 电气与能源工程学院 江苏省南通市 226002)
目前国家特别注重生态环境的监管工作,尤其强调对空气、水域、土壤等环境保护的策略,为此政府采取了一系列有效举措来保护生态环境。全国第一部地方生态环境监测法规《江苏省生态环境监测条例》已经于2020年5月1日正式施行,条例中明确将进一步提升监测能力补齐短板,构建好“天空地一体化”生态环境质量“监测眼”,优化监测网[1]。水环境监测工作作为生态环境监测系统中的重要分支,对于促进水环境可持续发展发挥着重要作用。
由于水环境问题的日益严峻,政府对水环境监管能力要求不断提升。水质监测作为水环境监管的基础环节,是一项长期的项目工程。以往针对水环境的水质监测,主要采用监测站点和人工采集两种方式:监测站点的投入使用有助于实现对重点污染源的实时监控,然而监测站点存在建设投入大、维修成本高、监测范围有限、覆盖面不全等弊病;人工采集主要是依赖检测人员到指定水域采集水体,有时需要驾驶船舶才能到达定点水域完成水体采集,虽然相对灵活,然而效率低的同时耗费大量的人力物力,而且对于操作人员而言存在潜在的安全隐患。可见上述两种监测方式都不能适用于复杂多变的水域环境,造成部分水域数据的空白,因此形成水环境管理的漏洞[2-4]。
近几年国内外一直在研究无人船的实际应用,多家单位也已完成应用于水环境监测领域的无人船的设计与建造。譬如:我国国家海洋局研究开发的“USBV”号[5]、英国普利茅斯大学某研究段位设计研发的“Springer”号[6]。基于无人船的水质监测主要通过船只搭载水质监测的传感器,利用自主导航系统完成水环境的数据测量工作。然而目前水域环境存在水体分层现状,不能只关注上层水体的水质参数作为水体的综合质量数据,所以需要进行水体的分层精准监测。
因此,本文考虑主要瞄准解决复杂水域环境的分层水质监管问题,采用水体分层监管无人船代替人力进行操作,重点围绕水体分层监管无人船的自主航行技术、水体分层监管技术等展开研究,提出相应的解决方案,研发一款能够实现水面、水下、空中立体化监测模式的水质监管无人船。基于无人船实时动态监测水域,实现从点到面的全覆盖数据监测。该无人船旨在满足水环境包括内陆湖泊、饮用型水库、精细水产养殖业等精测的要求,为水环境生态系统的综合管理和治理修复提供坚实的基础。
1 水体分层现状分析
水体分层在湖泊、池塘、水库等水生态系统中扮演着重要角色,由于季节性的温度变化会引起湖泊、池塘、水库等水域环境中的水体之间产生温度差效应,从而导致产生水体分层现象。水体分层容易导致上、下层水体之间缺乏交换传递,下层水体得不到臭氧的有效补充,下层水体的溶解氧会逐步降低,出现深水层的缺氧,甚至出现厌氧状态[7],因此容易引起水质恶化,破坏整个水域生态环境的平衡。下层水体的缺氧会加剧内源污染物的释放量,导致下层水体的水质发生严重恶化,当上下层水体发生自然混合时,受到污染的下层水体会传递给上层水体,从而导致整个水域环境水体恶化,破坏水环境的生态系统。因此要强化对水域环境的水质监管工作,尽量避免水域环境出现水体分层结构,通过水体分层精准监测,及时掌握水域环境的水体参数信息,真正保护水域环境,促进水环境的可持续发展。
2 技术要求
水体分层监管无人船能够适应于城市河道、湖泊、水库等多种水域环境,更要能应对复杂多变的水域环境,如狭窄水道、深水沟渠等。在自主航行的过程中能够顺利避障,在指定水域位置完成对水体的分层检测工作,因此提出如下技术要求。对于船体设计,要求采用稳定性高的小型船体,具有吃水浅、转向灵活、适航能力好等优势;动力能源要求节能环保,具备至少较长时间的续航力;无人船的作业模式应不受时间和气候的影响,可以实现自主航行;无人船舱室内部以及甲板上要便于安装水质监测模块,各类传感器、通信设备的布置,要求具有水体实时分层检测的功能,也可以实现水体的分层取样回收,同时能实现水体测量数据的实时传输和存储。
3 总体设计方案
水体分层监管无人船主要由双体无人船、无人机模块、航行控制模块、水体分层采样模块、水质检测模块、无线通信模块、主控系统等构成。水体分层监管无人船以双体船为载体,集成上述各个功能模块实现复杂水域的自主航行、水体的分层采集与检测、数据实时传输等功能,系统的整体框架如图1所示。

图1:无人船系统的总体框架图
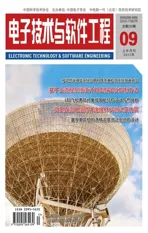
该无人船选用基于ARM内核的微处理器作为中央处理芯片,通过中央处理芯片与各功能模块实时交互,完成水质监管任务。船上搭载了GPS和北斗双模定位模块、超声波测距模块等,使用智能导航技术与航迹规划相结合,可实现自主航行。无人船的动力装置位于船体尾部,采用常规动力双螺旋浆的推进方式,以电力为动力,减少污染物排放,能源环保。无人船甲板上搭载有无人机,从空中配合协同完成水体监测工作,船只甲板上布置了可供无人机起降的停机坪,无人机可以在无人船上进行起降。无人机配备有摄像装置,通过无人机配备可以实现对远程水域的航拍功能。无人船上设置有水体分层采样模块,可以实现对水体的分层采样,通过多种水质检测传感器实现水水体的多参数检测。基于无线通信模块可以完成无人船与地面站系统之间数据传输,通过数据传输获悉无人船的实时作业情况,基于要求完成水体分层监管无人船的总体方案设计如图2所示。
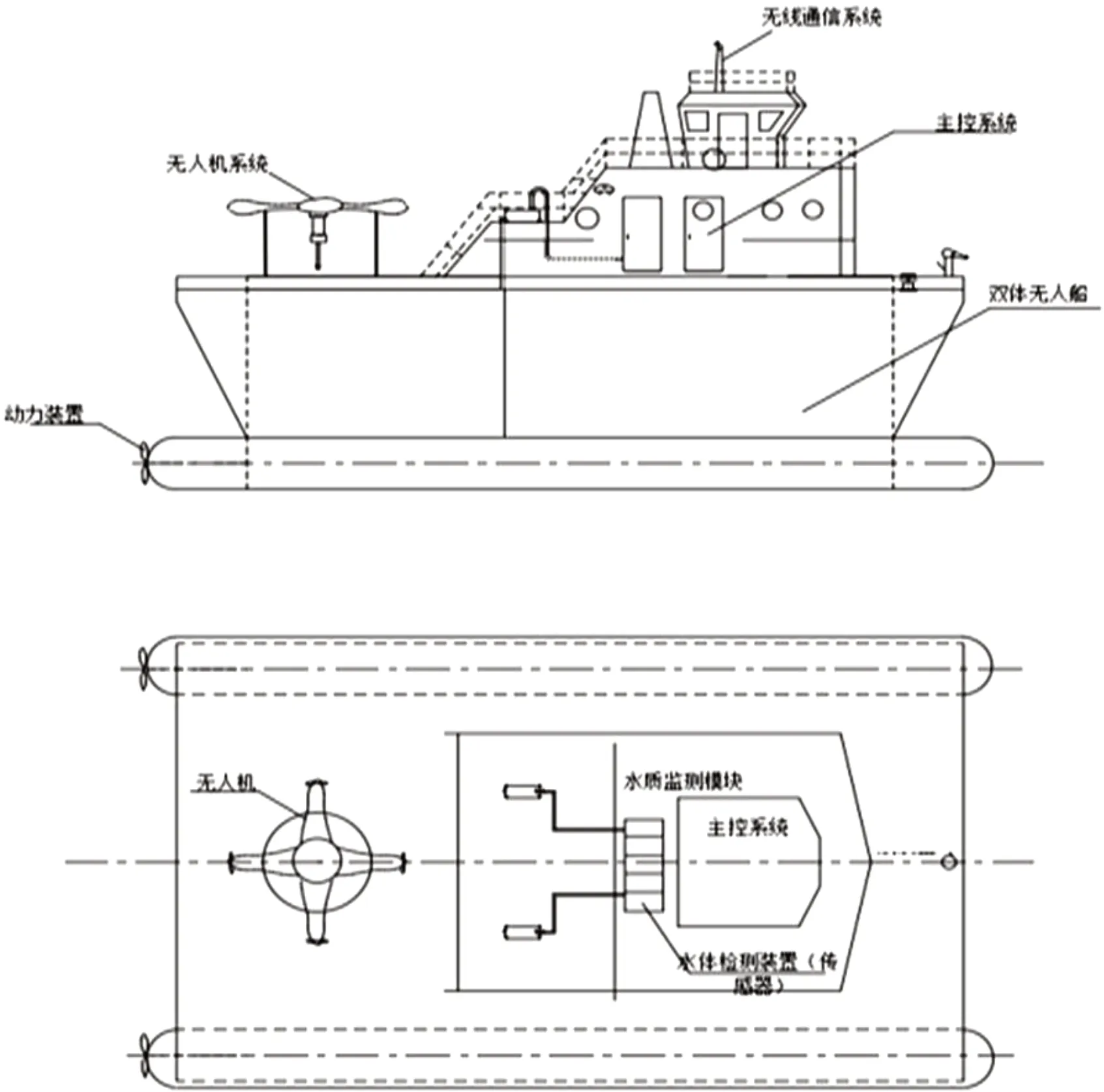
图2:水体分层监管无人船的方案设计图
3.1 无人船船体设计
无人船的船身主体采用小水线面双体船,水线面积小,主船体由两个潜水体和一个水上箱体构成,中间由两个流线型支柱连接起来。远离水表面的下潜体占据小水线面双体船排水量大部分,当它在波浪中航行时,所受到的波浪扰动力比常规单体船和常规双体船小很多。所以,小水线面双体船的耐波性比同等排水量的单体船好,且横摇周期长,经实船验证小水线面双体船横向运动小。小水线面双体船的设计有效的减小无人船航行的阻力,提高了无人船的航行速度和耐波性,增强航行的稳定性和承载能力。无人船的动力装置螺旋桨安装在水下潜体尾部,螺旋桨工作区域伴流均匀,使得船身效率较高,无人船三维效果如图3所示,基于设计方案项目团队完成船身模型的实物见图4所示。

图3:水体分层监管无人船三维效果图

图4:无人船船体模型实物
3.2 自主航行功能
无人船使用螺旋桨作为推进器,考虑到小水线面双体船设计,因此在两个潜水体尾侧分别对称布置两个螺旋桨,在其两个单体内部安装有两个无刷直流电机,可以实现正反转,搭配电子调速器对电机进行控制。通过对螺旋桨正反转的控制以及差速的控制实现对船体的航向运动控制,包括直行、转弯、停止等操作。为了及时获得无人船的船体姿态和位置,船体安装ATK-S1216F8模块和AHRS模块,其中ATKS1216F8模块为GPS和北斗双模定位模块[9],AHRS模块能够实时得到船体的角度信息。依托两大模块,有利于实现无人船姿态和位置的实时监测。无人船在航行过程中会进行位置信息和角度信息的实时获取,与目标航线、航向角进行对比分析。航行过程中,可以获得无人船的实时航向角φ1,此时主控系统会与目标航向角φ2比较,得到航向角的差值,基于PD控制运算,得到偏离角φ。基于无人船实际的偏离情况分析,将正负φ/2赋予左右电机,实现船舶航向的保持[9]。同时无人船上安装了超声波测距模块,超声波传感器的工作原理是发射出去的超声波遇到物体就会反射回来,传感器接收到反射信号后就可以测算出两者之间的距离,所以超声波测距模块为实现障碍物的探测和及时规避障碍物提供信号,有助于保证无人船的安全航行,巡航与避障工作流程如图5所示。
图5:巡航与避障工作流程图
3.3 水体分层采样与检测功能
目前通用的水体采样装置主要是完成近水表面的水体采样工作,尚未考虑到水体的分层现象,尤其要关注下层水体的质量,只有综合检测才能真正精准掌握水体的质量。水质监管无人船的水体采样模块就是为了满足分层才会的要求研制,相比现有水样采集器具有显著的创新点和优势。水体分层采样模块主要包括水体收集舱、电机、进水泵、出水泵、进水管、过滤阀、绕轮等,进水泵一端连接在第一进水管上面,另一端连接在水体收集舱上,进水管绕在绕轮上并且安装有过滤阀,绕轮安装在支架上,支架的一端连接在电机的输出轴上,出水泵一端连接在出水管上,另一端在水体收集舱上。该水体分层监管无人船在规划路径上航行,到达任务点即可展开水体采集工作,通过绕轮调整水管的深度实现水质的分层收集,分层收集实现分层检测,每次采样完毕,通过出水管路将释放出水体最大程度的降低了水样混合的程度,提高了检测系统的准确性检测。当检测出该水域水质污染时,将启动第二检测部进行二次收集与检测,并且完成污染水样的回收保管。
这种无人分层采样模式不会受到人员操作的人为因素影响,而且通过无人船的精准定位实现对水域采样点的精准定位,大幅度提高采样的有效性。通过对过滤器位于水中深度的精确控制,减少了分层采样中深度定位不准确导致的测量误差。该水体分层采样装置解决了人工水样采集的工作效率低、危险系数稿、定位精度差等问题,对于提高分层采样精度和准确性具有重要意义。水体分层采样装置简易图如图6所示[10-13]。

图6:水体分层采样装置图
水质检测装置是依托于水体收集舱室设置了各类检测传感器,主要有温度传感器、pH传感器、溶解氧传感器。基于采样水管分别获取所测水域的不同深度的水体样本,实现对待测水体水质数据的测量,并通过数据处理与反馈装置实时输出检测结果。水质检测系统对待测水样中的水质参数进行实时测量,并实时上传到主控系统,主控系统处理接收到的数据并将其通过无线传输系统传送到地面监控中心。地面监控中心将对数据进行有效处理和分析,将环境监测结果进行显示和存储[14-16]。
3.4 无人机协同作业功能
为了真正实现水面、水下、空中立体化的监测模式,水质监管无人船上配备有无人机装置,无人船甲板上搭载有无人机,从空中配合协同完成水体监测工作。船只甲板上布置了可供无人机起降的停机坪,无人机可以在无人船上进行起降,如图7所示。无人机配备有摄像装置,跟随无人船飞行,从高处拍摄无人船周围水环境的影像,实现对远程水域的航拍功能。无人船与无人机的协同作业模式有助于实现对水环境的全方位立体化的监测和观察,有助于提高水环境的管控质量,促进水环境的可持续发展。

图7:无人机装置配备图
4 试验分析
基于功能要求完成水体分层监管无人船的试验模型制作,为保证安全性,在实验之前,需要对船模进行密性测试和电机、舵机响应试验,测试结果表明,无人船可以顺利在水中浸泡10小时,水密性较好,同时电机、舵机响应正常,可以满足船模速度要求。项目团队将无人船下放至水域,开启作业模式,测试中,无人船能以0.5km/h的速度航行,水体分层监管无人船的实验现场如图8所示。

图8:水体分层监管无人船试验模型
项目团队在水域内利用无人船模型进行水体不同深度,分别为0.05米和2.05米水深的采样与实时检测工作,并将采样水体带到实验室用专业仪器进行检测,两者数据对比如表1所示。试验数据分析结果表明:水体分层监管无人船的分层采样与检测的数据结果与实验室专业仪器检测数据结果相差较小,可见水质监管无人船的测量数据可靠,值得推广应用。

表1:水体检测数据对比表
5 结论
(1)本文设计的水体分层监管无人船相对于传统的水质监测方式具有明显的优势,适用于城市河道、湖泊、水库等多种水域环境,解放人力的同时提高水体检测的工作效率。
(2)水体分层监管无人船采用小水线面双体船的船身设计,以电为驱动,融合了自主航行功能、水体分层采样与检测功能,配合无人机装置的协同作业功能,真正实现了水面、水下、空中的立体化监测模式。
(3)水体分层监管无人船不局限于近表面水体的采样与检测,同时能够有效完成水体的分层采样与检测工作,通过试验分析,无人船测得数据与专业仪器测得数据相比,误差很小,总体满足检测要求。该无人船的水体分层采样与检测模式填补了水环境管理的漏洞,为水环境生态系统的综合管理和治理修复提供科学的基础。
随着新一代信息技术的跨越式的发展,水质监测行业将来会迎来更多的增长空间,未来水质监管无人船的发展前景值得期待。