基于Matlab的时延差编码被动时反转镜水声通信系统仿真实验设计
2022-11-12郭铁梁赵旦峰
郭铁梁, 赵旦峰
(1.梧州学院a.电子与信息工程学院;b.广西机器视觉与智能控制重点实验室,广西梧 州 543002;2.哈尔滨工程大学信息与通信工程学院,哈尔滨 150001)
0 引 言
深海水声通信存在的最大困难就是各种干扰,深海水声信道的多径时延可达到数秒量级,还有复杂的环境干扰,这些干扰极易引起声信号的传播失真,对深海水声通信产生不利影响[1]。为在教学中使学生深入了解如何对抗深海水声通信最大的干扰—多径时延扩展,本实验设计应用了Pattern时延差编码(Pattern Time Delay Shift Coding,PDS)通信技术[2],把被动时间反转镜(Passive Time Reversal Mirror,PTRM)技术应用于PDS系统中[3],上述技术的结合在对抗深海信道多径干扰上具有一定的优势,把矢量信号处理技术[4]应用到上述系统以提高系统的输入信噪比(Signal to Noise Ratio,SNR)。
本实验针对深海通信,将PTRM-PDS通信系统[5]与矢量信号处理技术相结合,进行教学实验设计,对水声通信PTRM-PDS系统的全过程进行仿真,这有利学生对PTRM-PDS通信系统的理解。结果表明,该系统能够在低SNR和较强多径情况下进行高速率通信。
1 系统结构设计
1.1 PDS通信原理与矢量信号处理
PDS基本原理如图1所示,在发送信息码元中,由不同起始位置的Pattern码元,携带有用信息[6]。
图1中:Δτ=(T0-Tp)/(2n-1)为编码量化单位;序号k=0,1,…2n-1;Tp为Pattern码元长度;T0为所发送的总信息码元长度;n为一个信息码元所携带的bit数。Pattern时延差编码属于脉位调制,每个码元携带不同的信息,通过kΔτ的不同大小,即Pattern码的不同起始位置来实现。因为一个长为T0的码元含有的信息为n bit,所以Pattern时延差编码的通信速率Rb=n/T0bit/s。
对声源方位进行估计以及综合应用声压、振速矢量信号对抗深海信道干扰的理论基础是与矢量水听器偶极子指向性相关的电子旋转技术。对深海水声通信,远场声信号近似为平面波,矢量水听器接收机的输出振速和声压具有一致相关性,p为矢量水听器输出的声压,vx、vy分别为x、y方向上的振速分量,设vx和vy的线性组合信号为vc[7-8],图2给出了矢量信号应用原理图。
1.2 加权直方图方位估计与PTRM技术
加权直方图方位估计是一种统计算法[9],图3所示为加权直方图方位估计的原理,首先解析处理矢量水听器的输出声压、振速矢量信号,将声压与振速的两个分量分别做互谱计算,进行加权直方图统计得到所有频点上的方位估计曲线,曲线的最大值即为方位估计结果。
被动时间反转镜(PTRM)技术,不同于时间反转镜(TRM),PTRM阵元只带接收功能[10],PTRM技术能有效抑制码间干扰,用简单的算法在时域对信号进行处理,PTRM的应用原理如图4所示。
图4中,发射器首先发射探测信号d(t),然后发射s(t),接收器将探测接收信号dr(t)与d(t)的时间反转信号d(-t)作卷积运算得到d′(t),d′(t)再经时间反转得到d′(-t),最后将d′(-t)与随后的接收信号sr(t)进行卷积运算得到最终接收信号r(t),至此接收器就完成了PTRM的运算处理过程。
1.3 深海PTRM-PDS系统
将矢量信号处理、加权直方图方位估计和PTRM技术与Pattern时延差编码相结合,设计成PTRM-PDS通信系统,一般情况下将系统的总带宽分成若干个子带,构成较高通信速率的深海多信道PTRM-PDS通信系统[11]。深海PTRM-PDS通信系统的结构原理如图5所示。
将编码后的3个子信道信号叠加得到s(t),中间经历矢量运算及方位估计过程,经PTRM处理后得到r(t),将r(t)通过信道解码器进行解码。
2 系统仿真与分析
2.1 深海信道模型及参数设置
本实验使用《206拖曳线列阵声呐作用距离预报系统》中深海信道模型进行计算机仿真[12],利用射线声学理论建立深海多径信道模型[13]。两种典型的信道冲激响应如图6所示,图6(a)为水平距离50 km,收、发节点均位于1 km水深的情况,这个位置恰好是深海声道轴;图6(b)则为水平距离30 km,收、发节点分别位于150 m、1 km水深,位于非声道轴处。
表1所示为深海PTRM-PDS通信系统的仿真参数设置。
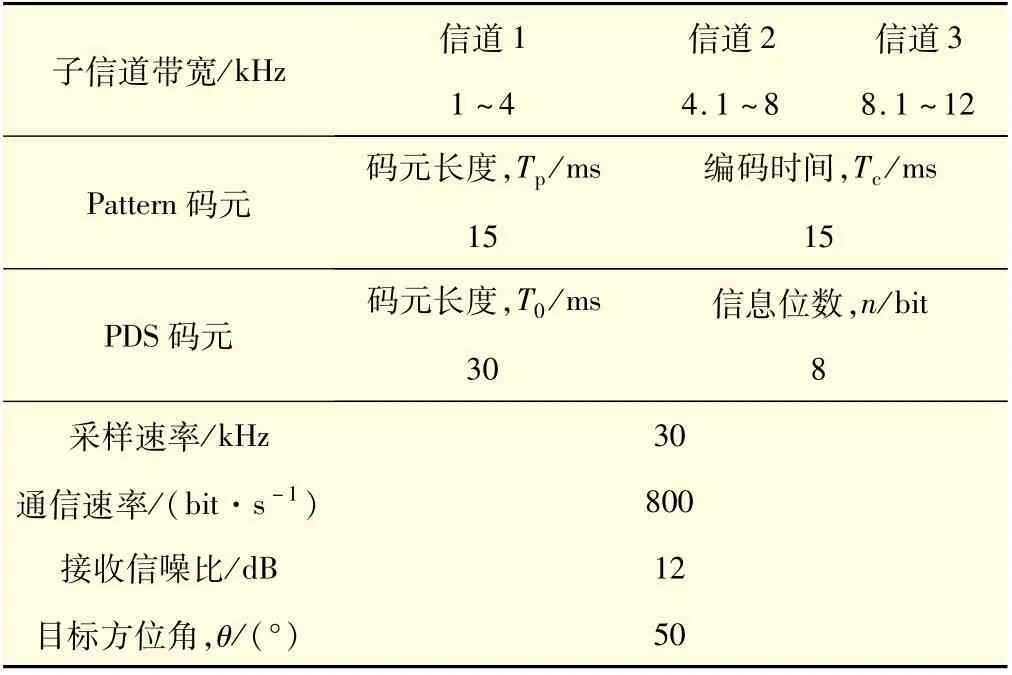
表1 深海PTRM-PDS系统仿真参数
如图7所示为深海PTRM-PDS通信系统的仿真流程图,系统仿真中的编解码均为3信道,系统噪声为高斯白噪声。
2.2 仿真分析
在设定信道冲激响应模型及通信系统仿真参数之后,利用Matlab软件对系统进行仿真,并对结果进行分析,图8所示为3个信道编码器编码后的叠加码形。
如图9所示为信号通过信道前、后的波形比对。图9(a)为附加了同步码的发射信号,加上一段时隙,目的为减缓深海多径信道对其后面信号的影响[14]。图9(b)为发射信号经过深海信道之后的波形,对比图9(a)、(b),可见,多径时延扩展增加了发射信号的长度,说明增加时隙非常重要,否则会产生码间干扰。
如图10所示为矢量处理信号波形,图10(a)为矢量水听器接收到的声压信号,图10(b)为x轴方向上的振速分量。从图中可知,声压与振速波形相似。图10(c)为vx和vy的合成信号vc。
如图11所示为方位估计结果,仿真设定目标方位角θ=50°,而图中在方位48°位置上波形出现最大值,可知方位估计的误差约为2°,由此可见,对于实际的PTRM-PDS通信系统来说,该估计方法具有较高的准确性。
如图12(a)所示为深海信道冲激响应估计[15],由于PTRM技术的应用,使得信道的估计波形与原波形相近,将图12(a)与图6对比可以验证这一点。图12(b)为幅度已经归一化的时反信道,可见,此时反信道具有近似为单位冲激响应的主峰。将矢量处理后的信号经过时反信道,得到PTRM输出信号r(t),如图12(c)所示。
被动时间反转过程的输出信号r(t)经滤波之后,再将r(t)进行解码,接下来进行重置相干解码[16],如图13所示。
如图13所示为重置相干解码的一个波形,根据图13中的最大幅值对应的时间可推测对应信息码的时延差,为作为对比分析,将拷贝相关码作为参考信号,由图14可知,拷贝相关码信号的高幅值较多且相近,在这种情况下就很难对时延进行估计,因此相干重置对于解码具有非常重要的作用。
2.3 误码率分析
误码率(BER)分析,可以利用图6(a)、(b)两种较为典型的深海信道,图6(a)为深海声道轴(1 km水深)的冲激响应,对于中远距离水下通信的应用有重要参考价值[17],图6(b)为信道多径时延干扰较大。如图15所示为上述2种信道冲激响应下3个子信道的部分误码率,图15(a)为深海声道轴信道BER,图15(b)为深海非声道轴信道BER。系统参数设置见表1,通过在输入SNR小于12 dB情况下BER的部分数据统计来分析系统的性能。
由图15可见,如果输入的SNR相同,图6中信道(a)深海声道轴的BER要比信道(b)低将近50%,为获得较低的BER,在通信时可以把发射器和接收器放在声道轴上。
3 结 语
本文结合矢量信号处理、方位估计等技术,综合构建设计深海PTRM-PDS通信实验教学系统,利用Matlab仿真完成上述通信系统及模型的验证。仿真结果可以使学生了解该系统在深海水声通信中的性能,利用深海声道轴声传播的特性,可以实现距离较远的深海水声通信。另从研究性教学的角度,还可启发学生,通过更多子信道可大幅提高通信速率,增加Pattern码元数量可有效提高系统的抗多径能力。深海PTRM-PDS通信系统Matlab仿真实验,可使学生全面了解如何建立高效可靠的深海水声通信系统,通过这种教学方式有利于激发学生的科研意识,提高学生的科研能力,这是科学研究促进教学的一个典型范例。
