新型爬壁机器人步态规划及设计
2022-11-12徐阳阳于江涛李占贤张富淋刘俊帅
徐阳阳, 于江涛, 李占贤, 张富淋, 刘俊帅, 霍 平
(1.华北理工大学机械工程学院,河北 唐山 063210;2.河北省工业机器人产业技术研究院,河北 唐山 063210)
0 引 言
随着国民经济和科学技术的快速发展,各领域对移动机器人的需求越来越大。尤其是大型设备钢材建筑、船舶、和高层建筑等长期作业的高危环境中,需要定期检修、维护和清洁人作业环境恶劣、耗时、存在较高安全隐患、效率低和维护成本高等。爬壁机器人已运用到许多高危作业中,代替人工在不同环境下进行作业,越来越受到各领域的青睐[1]。为了实现精确的作业要求,稳定可靠的运动和足够的附着能力是必要和重要的。
近年来,爬壁机器人发展迅速,技术逐渐成熟。根据机器人的吸附方式不同,可分为磁性吸附[2-8]、负压吸附[9-10]、静电吸附[11-12]、真空吸附[13-15]和仿生干胶吸附等。又根据其运动方式不同,分为轮式[2,8]、履带式[4,7,11]、足式[13-14]和混合式等。各类型的爬壁机器人均存在着优缺点。例如,轮式机器人速度快、比较灵活,缺点是吸附力小、负载轻、越障能力差;履带式爬壁机器人具有附着力强、负载大、具有一定的越障能力,缺点是运行速度慢;足式爬壁机器人适应性高、附着力强、越障能力强,缺点是速度低;负压吸附和静电吸附由于壁面存在灰层等,其有效载荷和可靠性较低。相反,磁性吸附具有较强的吸附力,满足吸附力和可靠性的要求。
针对新型爬壁机器人结构,并根据其仿生原理,设计一种能够连续性步态规划,实现机器人抬腿、迈步和落腿的单一动作及其重叠动作,满足其作业要求,并确保爬壁机器人运动具有良好的直线性和连续性,以及机身的稳定性和平稳性。
1 爬壁机器人整体结构
虚拟样机模型是验证设计可行性的重要环节,设计机器人各部件模型并完成装配。爬壁机器人整体结构如图1所示,分别由驱动装置1、左腿组件2、右腿组件3和本体框架4组成[16-17]。机器人本体框架长410 mm,宽265 mm,腿部底部到本体框架上方伸腿范围为95~140 mm。
为保证机器人爬行过程结构紧凑,腿部结构设计成左腿和右腿结构,既要结构简单又要运动精度高,有较高的稳定性,故将腿部设计为并联伸缩式结构,呈平行四边形布置,且两腿部结构设计成对称结构,始终使机器人本体框架与作业壁面保持水平,提高机器人整体的稳定性。左腿和右腿的运动原理相同,通过调节转速改变前、后滑块间的距离,调整迈步间距和高度,实现机器人抬腿与落腿动作。当两滑块间距离增大时,足部吸附在壁面上;两滑块距离减小时,足部抬起向前移动。两足依次交替吸附在壁面上行走,具有良好的越障能力。
2 爬壁机器人运动规划
2.1 基于多项式运动规律的运动规划
爬壁机器人在运动过程中需要不停地进行抬腿、匀速移动和落腿动作,落腿时的冲击会造成一定的振动,影响机器人运动的平稳性。因此,要避免在机器人腿部构件产生冲击,故采用高次多项式运动规律。
2.2 拉杆与足部、丝杠间转角的运动规划
爬壁机器人运动分为抬腿和落腿两个阶段。其中:电磁铁断电时,开始执行抬腿动作,称为初始时刻;抬腿动作完成,开始执行落腿动作,称为中间时刻;落腿动作完成时,称为末尾时刻,足部与壁面接触,电磁铁通电。
在初始、中间和末尾3个运动时刻设置对应边界条件,即拉杆与丝杠、拉杆与足部间转角的角速度和角加速度均为零。代入边界条件,建立拉杆与足部、拉杆与丝杠间转角随时间变化的多项式方程。设置9个边界条件,引用9个未知参数,故建立8次多项式运动规律方程。
腿部运动机构简图如图2所示。O为两滑块中心,即为坐标原点;P1为后滑块,P2为前滑块;当足部与壁面相接触时为运动初始位置,两滑块的初始距离为2R,拉杆与足部所夹角θ初始=60°;抬腿最大高度h时,所夹角θ=30°。θ1表示拉杆与足部的实时关节角、θ2表示拉杆与滑块的实时关节角;S表示滑块间的实时距离,S相对于初始距离2R的瞬时相对位移差记为ΔS。足部长度为2 r,大小为400 mm,拉杆长度为L,大小为200 mm。
纵坐标与角θ1、θ2对应关系,
式中:θ1为拉杆与足部的实时关节角;θ2为拉杆与滑块的实时关节角;L为拉杆长度。
设机器人抬腿的最大高度,
运动过程中,θ1与滑块的瞬时相对位移差ΔS关系如下:
由式(3)解得:
建立ΔS随时间t的基于8次多项式规律的运动方程:
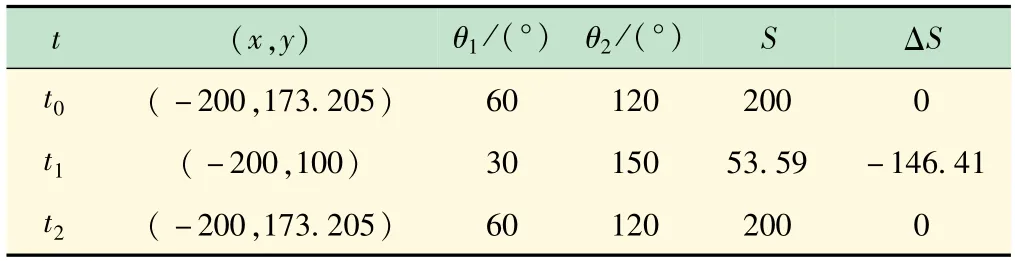
表1 各个时刻的关节转角和位移差变化
由表1可知边界条件,将其代入式(5)得:c0=0,c1=0,c2=0,c3=-4 685.12,c4=14 055.36,c5=-17 569.20,c6=11 127.16,c7=-3 513.84,c8=439.23。由式(4)代入对应的数值,得到转角θ1随时间变化方程式:
同理,θ2随时间变化得方程为
根据函数表达式,通过计算得到θ1、θ2随时间变化示意图,如图3所示。
由图3可知,运动过程中,θ1和θ2始终保持为互补。图3中θ1的变化范围为(30°~60°),与之前规划的变化相同,验证了腿部结构运动的合理性。
2.3 滑块与丝杠间相对运动规划
以左腿为例,本体框架速度v0=100 mm/s,前、后滑块间距离保持不变,相对于地面速度为零,相对框架速度为-v0。t0~t2时间段内,设本体框架沿壁面运动距离为s,前滑块速度为Δv1,后滑块速度为Δv2,分别设其随时间变化的函数方程为Δv1(t)、Δv2(t)。同样需要引入相应边界条件:①运动初始t0、末尾t2时刻加速度不发生突变;②前滑块沿丝杠运动距离与本体框架沿工作壁面向前运动的距离s相同;③两滑块间距离相等,大小为2R。
引入5个未知参数,建立前滑块的相对速度、加速度与时间变化的4次多项式方程,
代入多项式方程,得:
故得前滑块的运动方程,
前、后滑块瞬时相对位移差关系:
解得后滑块随时间变化方程:
根据Δ˙v1(t)、Δ˙v2(t)变化方程,得到两滑块相对于本体框架速度与加速度随时间变化示意图,如图4、5所示。
图4中0~1 s内,两滑块间距离逐渐减小,完成抬腿动作;在1 s时,两曲线相交速度相等,两滑块距离为零,且足部距地面达到最大高度;在1~2 s内,两滑块间距离逐渐增大,完成落腿动作;在2 s时,落腿动作结束,足部与壁面吸附。在运动的初始与末尾时刻速度均为-100 mm/s,相对于地面静止,未产生摩擦冲击,确保机器人运动平稳性和合理性。
在图5中2 s内,加速度为连续函数,平滑性良好,且在运动的初始时刻t0和末尾时刻t2均为零,没有发生突变。所以,在运动过程中两滑块不会与丝杠发生刚性冲击。
3 步态规划
3.1 步态设计
步态规划是描述机器人在运动中抬腿、行走、落腿的运动规律。步态规划设计的合理性是保证足式机器人运动稳定的前提。常用的步态是对角步态和爬行步态。以爬行步态为参考对象,设计一种连续性步态,机器人左腿为腿1,右腿为腿2,图6所示是机器人步态时序图。
在图6中,0时刻机器人处于初始位置;在0~T/5周期内,机器人左腿和右腿处于支撑状态,机器人腿部执行回零运动;在T/5~2T/5周期内,右腿处于支撑,左腿执行爬行任务,在2T/5时刻左腿完成落腿;同时刻右腿向爬行终点移动,左腿支撑并返回爬行起点,在3T/5时刻右腿到达爬行终点,左腿到达起点;同时刻左腿向爬行终点移动,右腿支撑并向起点移动,在4T/5时刻左腿完成落腿,右腿到达起点;在4T/5~T周期内,机器人重复2T/5~3T/5内爬行过程,机器人左腿和右腿重复执行交替动作,实现连续爬行。
3.2 步态规划
爬壁机器人一个完整的爬行过程简图如图7所示。
(1)图7(a)中,黑色等腰梯形表示左腿和右腿运动初始位。左腿滑块向前做加速运动,后滑块加速较大,滑块间距离逐渐缩小并保持恒定,滑块开始同速移动,红色梯形表示左腿加速运动终止位,完成抬腿动作。
(2)图7(b)中,右腿处于支撑阶段,左腿向前做匀速直线移动,移动一段距离后,两滑块同时做减速运动直至为0 mm/s,此时前滑块与机身框架间的距离为10 mm,滑块间距离仍保持不变。蓝色梯形为左腿匀速运动终止位,完成匀速直线移动。
(3)图7(c)中,左腿滑块开始做反向加速移动,后滑块加速较大,两滑块间距离逐渐增大并保持恒定,机器人完成落腿,粉色梯形为左腿完成反向落腿,同时,右腿处于加速运动初始位。
(4)图7(d)中,左腿处于支撑并反向匀速移动,右腿重复图(a)中左腿的加速运动,黑色梯形为右腿实现加速抬腿运动。
(5)图7(e)中,左腿处于支撑并反向匀速移动,右腿重复左腿图(b)向前匀速移动,黑色梯形表示右腿完成匀速移动,粉色梯形为左腿反向匀速移动。此时,前滑块与机身框架间距离为10 mm,处于匀速运动终止位。
(6)图7(f)中,左腿反向匀速结束,后滑块与机身框架间距离为10 mm,粉色梯形为左腿反向运动终止位;右腿为黑色梯形,重复左腿图(c)反向加速运动并完成落腿。
4 实 验
对爬壁机器人腿部的单独步态的运动能力进行测试,包括抬腿、落腿、迈步,在爬行过程中的混合步态等。图8为爬壁机器人在垂直壁面中执行完整的爬行运动过程侧视图。
爬壁机器人在垂直壁面中执行多次爬行实验,为方便观察爬壁机器人爬行各阶段腿部位置变化和迈步过程,共分为6个步态。
图8(a)为爬壁机器人双腿同时处于支撑状态,开始执行回零运动,到达爬行初始位置;图8(b)为机器人左腿执行加速抬腿阶段,左腿电机执行差速加速,实现后滑块与前滑块间距离逐渐减小并保持稳定后保持同速,左腿完成抬腿;图8(c)为机器人左腿电机同速转动,前、后滑块执行匀速直线移动,左腿完成向前迈步,此时左腿电机速度为零,前滑块与机身框架前侧间的距离为10 mm;图8(d)为机器人左腿电机开始反向加速,滑块间距离逐渐增大并保持恒定,实现左腿反向加速落腿,并执行匀速运动;同时刻右腿电机加速运动,实现抬腿;图8(e)为左腿执行反向匀速运动,右腿正向执行匀速运动,实现右腿向前迈步;图8(f)为机器人右腿电机反向加速,右腿完成反向加速落腿,同时刻左腿开始重复图8(b)中加速抬腿阶段。
5 结 语
为爬壁机器人设计了一种新型并联伸缩式腿部结构,能够调整迈步间距和迈步高度。通过对爬壁机器人腿部结构中拉杆与足部、拉杆与丝杠间转角和滑块与丝杠间的相对运动规划,避免机器人产生刚性冲击影响其机身的稳定性。同时,完成了机器人的步态设计和规划,确保机器人执行机构实现足部依次交替吸附并连续运动。通过实验表明,爬壁机器人可实现抬腿、迈步、落腿及重叠等步态,调整机器人的迈步高度和迈步间距,机器人左腿和右腿连续执行交替运动,爬壁机器人连续爬行平稳,实现机身向前执行平动,验证了爬壁机器人具有垂直壁面的爬行能力。
