基于图像处理的智能分类垃圾桶的设计
2022-11-11胡耀王栋马龙张斌
胡耀,王栋,马龙,张斌
(塔里木大学机械电气化工程学院,新疆阿拉尔,843300)
关键字:图像处理;树莓派4B开发板;垃圾智能分类;智能垃圾桶
0 引言
近年来随着经济、工业的飞速发展,产生垃圾大量的生活垃圾、工业垃圾。垃圾现有的主要处理方式有掩埋、焚烧、填海,导致垃圾污染也从陆地蔓延到了海洋。以上垃圾的处理方法不仅污染环境而且造成资源浪费[1][2]。降低环境污染,变废为宝,最大程度挖掘垃圾的潜在价值,垃圾分类回收势在必行。但是人们觉得垃圾分类繁琐、费时、容易混淆。很难真正做好垃圾源头分类很难。综合以上问题,本次大学生创新创业训练项目设计一个基于图像处理的智能分类垃圾桶,该垃圾桶以日常生活垃圾分类为主题,如:厨余垃圾、有害垃圾、可回收垃圾和其他垃圾等四类生活垃圾,该垃圾桶能具有自主判断、垃圾分类、方便投放、满载警报功能及播放垃圾分类宣传片的功能。
1 智能分类垃圾桶的结构与原理
该垃圾桶的外部形状及内部结构如下图所示,如图1和图2所示。垃圾桶整体尺寸为直径50厘米,高60厘米,垃圾桶的容积约为118升,4个子垃圾桶即垃圾投放箱可拆卸。

图1 智能分类垃圾桶外观

图2 智能分类垃圾桶爆炸图
1.1 智能分类垃圾桶的结构
该垃圾桶主要由以下几个部分组成,垃圾桶支撑架,投放箱(4个)、隔板、舵机等。支撑架用于支撑四个子垃圾桶及垃圾桶上部投放箱、隔板及舵机,四个子垃圾桶由四个舵机单独控制[3]。
1.2 智能分类垃圾桶的原理
(1)垃圾桶有红外检测功能,在光红外传感器模块探测范围内探测到有人员要投放垃圾时,垃圾桶自动打开桶盖,人员将垃圾投放到垃圾桶上部的投放箱中,在垃圾投放箱中进行垃圾识别,此时摄像头会获取垃圾图片,完成图像信息采集。
(2)摄像头拍照获取垃圾图片,并将图片信息上传给树莓派开发板中的图像处理系统,图像处理系统会调取模型数据库与该图片进行分析、对比、识别,获得该种垃圾的可信度,从得出垃圾的种类。
(3)识别出具体垃圾种类后,树莓派开发板将发出控制命令到控制系统。假设当前识别出的是可回收垃圾,控制系统将控制该垃圾桶的舵机和隔板舵机,由舵机带动可回收垃圾的垃圾桶旋转到隔板投放口下方,隔板投放口打开,垃圾投入垃圾桶,完成垃圾投放。若垃圾桶内垃圾达到容纳上线,位置传感器检测到有物体,触发满载报警器报警,及时提醒工作人员清空垃圾桶。
2 智能分类垃圾桶的工作流程
本项目设计的智能分类垃圾桶主要由图像信息采集模块、图像处理模块与垃圾分类执行模块组成[4]。如图3所示。图像信息的采集在本项目设计的采集箱中进行,调整好光源位置,通过树莓派摄像头获取图像,并将图像保存并传输到树莓派开发板。在前期已创建好的垃圾识别模型、分类模型中对图片进行处理、评估,从而正确得出垃圾的类别。同时将所识别出的垃圾分类信号传输到树莓派开发板,树莓派开发板发出信号控制舵机旋转相应的角度,将对应的垃圾桶转到垃圾投放口,完成垃圾投放。
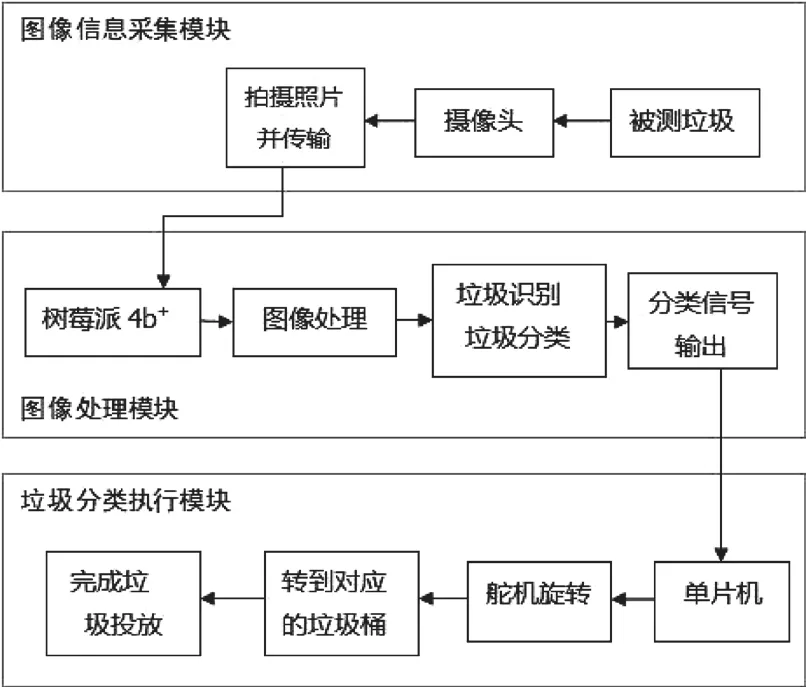
图3 智能分类垃圾桶工作流程
2.1 图像信息采集模块
主要由树莓派4b开发板、树莓派摄像头和采集箱组成。如图4所示。
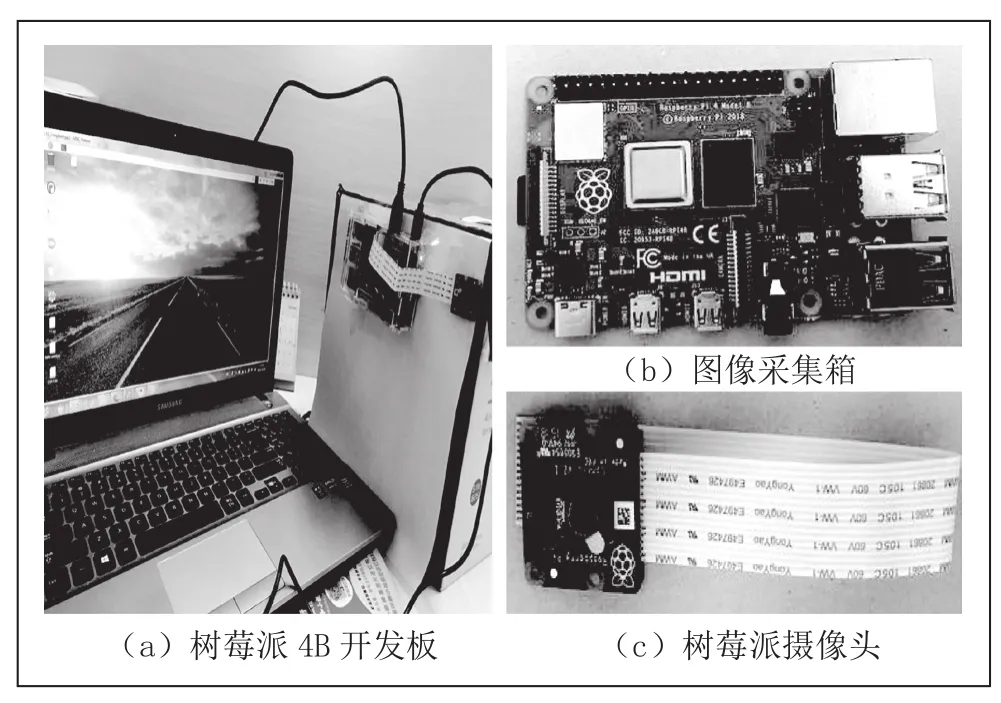
图4 垃圾图像采集组件
2.1.1 垃圾样本的采集
(1)训练样本的采集
为提高垃圾识别的精度,项目组成员进行了大量的样本采集,保证图像处理的训练模块有充足的、全面的数据库。训练样本主要对可回收垃圾、干垃圾、湿垃圾及有害垃圾等四大类进行采集。每一种垃圾采集至少1000个样本以上,以可回收垃圾为例,首先考虑到可回收垃圾的种类,其次考虑每种可回收垃圾的形状、大小、颜色等情况,最后考虑到样本采集时的角度、距离、光照等问题。同理其他三种垃圾样本采集时也要考虑相关的因素。
采集的可回收垃圾主要选取了矿泉水瓶、酒瓶、易拉罐、废纸等。有害垃圾主要选取了过期药品、废旧电池、过期化妆品、废灯泡等。干垃圾即其他垃圾主要选取了烟头、卫生纸、塑料袋、陶瓷等。湿垃圾即厨余垃圾主要选取了香蕉皮、橘子皮、苹果核、西瓜皮、鸡蛋壳等。
样本采集完毕后,检查所获取的垃圾图片是否清晰、是否有噪点,如果有要重新采集,直到清晰可用为止。检查结束后建立文件夹将获取的每一类垃圾图片进行命名并保存到对应的文件夹中,方便图像处理模块种模型的训练。
(2)验证样本的采集
验证样本即是对训练的模型进行检验的对象,尽量与训练样本不同同,以免影响识别的准确率。项目组成员随机选取四类垃圾共计175个,随机抽取一种进行验证直至175个垃圾都验证完毕。
2.2 图像处理模块
本项目采用卷积神经网络(CNN)算法 对图像进行信息读取、模型建构及模型训练,最后得出学习函数,当随机投入任意种垃圾时,训练出的模型会预测垃圾的类型。 构建的模型由输入层、卷积层、池化层、全连接层和输出层组成。卷积神经网络结构如图5所示。
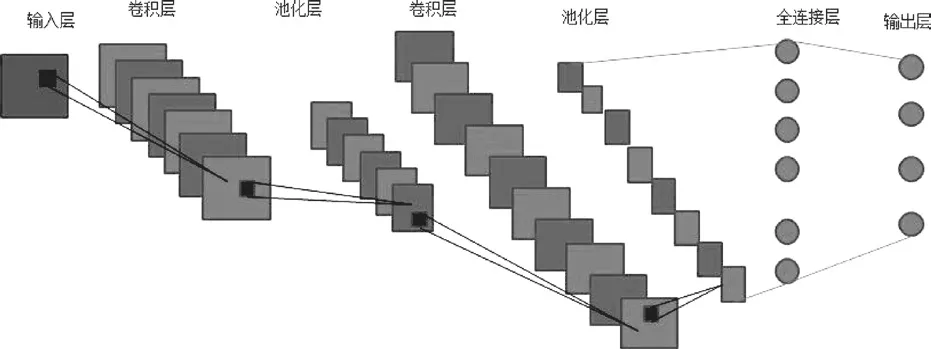
图5 卷积神经网络结构图
(1)其中输入层:输入垃圾图片,为卷积层提供信息数据。
(2)卷积层:卷积层通过卷积运算提取图像的特征,随着卷积层的增加,多层网络可以提取更为复杂的图像特征。公式,其中,是l层第j个特征平面的输出特征,是l-1卷积层第i个特征平面的输出,是l层第j个神经元的权值,是l层的第j个特征平面的偏置[5]。
(3)池化层:压缩数据,降低数据维度,池化层在卷积之后对图像进行降维。采用relu函数激活神经元。
(4)全连接层:把所有局部特征以及各通道的特征矩阵结合变为向量代表,得出每一类的得分,即起到“分类器”的作用,本项目采用Softmax函数进行分类。
2.3 垃圾分类执行模块
垃圾正确的分类投放主要由树莓派开发板、舵机和四个子垃圾桶共同完成。首先在图像信息处理模块中,完成了所投放垃圾的识别并输垃圾类别信号,树莓派开发板将根据所获取的信号控制对应的舵机旋转到投放口下方,打开投放口隔板完成此次垃圾投放。
3 垃圾分类的准确率
得出此智能分类垃圾桶的验证结果如表1所示。将175个生活垃圾混合随即抽取一种投入垃圾桶进行识别,同事统计每种垃圾的个数及垃圾被正确识别出来的次数,直到所有垃圾都识别完成,统计系统识别的结果。得到下表1
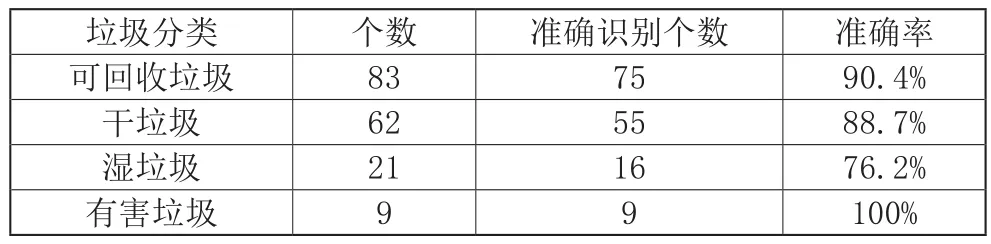
表1 智能分类垃圾桶验证结果
4 结束语
本文介绍了一种智能分类垃圾桶,该垃圾桶利用了树莓派开发板、机器视觉技术和传感器技术等。项目组成员实地采集拟分类四种垃圾对其进行测试,结果准确率分别是90.4%、88.7%、76.2%、100%。通过了垃圾分类测试,验证了垃圾智能分类的可行性。但是该装置对于处理剩饭剩菜之类的厨余垃圾还有待提高,训练模型需进一步优化改进。