食物网稳定性机制研究进展:一个基于等级系统的框架
2022-11-11徐光华杨俊杰
徐光华,杨俊杰
1 浙江农林大学暨阳学院,诸暨 311800 2 中国科学院植物研究所植被与环境变化国家重点实验室,北京 100093
食物网主导了生态系统中物质和能量的流动,驱动了初级和次级生产、废物分解、养分回收等过程,是生态系统中的核心组分[1]。深入理解食物网的运行机制,对于更好地管理各种自然和人工的生态系统、促进可持续发展具有重要意义。稳定性对于食物网的结构维持、功能发挥和动态演化都起着重要作用,一直以来是群落生态学的重点关注问题[2—4]。早期的学者通过对自然界的观察、实验、数学模型模拟等手段,发现多样性与稳定性之间存在正相关[5—8]。而到了20世纪70年代,Robert May用随机模型对群落的稳定性进行模拟研究,得出了与当时流行的观点相悖的结论,即物种数越多、连接度越高、平均相互作用强度越大,群落反而越难以稳定[9—10]。虽然May的模型中也包含了竞争(-,-)、互惠(+, +)等种间相互作用类型,但在限定为只包含摄食关系(+,-)后,该结论仍然成立[11]。这引发了人们对于食物网稳定性机制的思考[12—13]。May本人的解释是,虽然随机群落的稳定性随着复杂度的增加而降低,但真实群落中可能存在一些迂回策略(devious strategies),使得复杂和稳定可以共存,而生态学家的任务正是揭示这其中的机制[3,14]。由此,人们开始了对食物网稳定性机制的长期探索[4,15—16]。
早期研究主要关注定性食物网的稳定性,即通过在给定拓扑结构的基础上[17—21]随机赋予物种间相互作用强度,从而得到食物网的动力学模型,再通过计算机模拟考察其稳定性[20,22]。然而这些努力最终却以失败告终[23],这说明只考虑物种数和拓扑结构是不够的[25]。对于只包含少数物种的各类食物网模块(module)而言,在具有相同拓扑结构但不同相互作用强度的分布的情况下,稳定性上的差别可能非常大[24]。随着观测和实验的深入,人们开始对食物网的定量信息有了更多的了解,发现其中相互作用强度的差别可跨越若干个数量级,在分布上则偏向于大量的弱相互作用和少数强相互作用[26],而且强相互作用似乎很少耦合在一起[27]。这些发现使生态学家认识到,只有将相互作用强度也纳入考量,才能有效揭示May所说的“迂回策略”,从而真正理解食物网的结构与动力学稳定性的关系[28—29]。
时至今日,这一方向取得了很大进展,已有多种稳定性机制被提出[4]。为了便于从全局角度去理解食物网结构与动力学稳定性的关系,有必要对这些机制进行归纳和整理,从而构建起食物网稳定性的理论框架。本文首先简要介绍了食物网动力学模型和相互作用强度的概念;然后对各类模块的稳定性机制进行分类梳理,并描述了不同模块如何构成食物网整体,以清晰地呈现 “模块-全网”双层框架;接着基于等级系统理论对这一框架加以扩展,并从动力学和能量学角度对各层级之间的关系进行了探讨;最后对进一步的研究进行了展望。
1 食物网动力学模型
1.1 一般模型
在给定物种数(n)的前提下,群落的动态可以用一个多元微分方程描述:
(1)
这里,Xi表示物种i的密度;X是表示群落中所有物种密度的向量;fi(X)是种群i的增长率与群落中所有n个物种种群密度的函数关系。食物网模型本质上是对生态群落的一种简化,即只考虑种内作用和种间的摄食关系(可包括植食、捕猎、食腐、食屑、寄生等形式),而忽略其他类型的相互作用。其中种内作用可认为只受环境因素和种群本身密度的影响,与群落中其他物种无关,而摄食作用则同时受到自身及与之交互物种的影响。在下文中,如未专门指出,将这一关系统称为消费者-资源(consumer-resource,C-R)相互作用,在模型中用两两相互作用项表示。其中资源对消费者的密度有正向作用,而消费者对资源的密度则有负向作用。据此,方程(1)可具体表示为:
(2)
其中,fi(Xi)是物种i的种内作用项,对于基础物种(生产者)来说,它一般由指数增长项和密度制约项组成,常表示为logistic方程的形式,而对于中间营养级物种或顶级捕食者则常表现为一个固定的死亡率;fij(Xi,Xj)表示低营养级物种j对物种i生物量的贡献;fik(Xi,Xk)表示高营养级物种k的捕食给物种i造成的损失。基础物种有消费者而无猎物,顶级捕食者则有猎物而无消费者。在自然界中,物种间的两两摄食关系往往会受到第3个乃至更多其他物种的影响,称为高阶相互作用,此时需要用超图(hyper-graph)来表示食物网的拓扑结构[30—31]。
由于自然界食物网非常复杂,在研究中都会出于不同的目的而进行一些必要简化,例如,将多个物种归并为一个功能群,或者将一些较弱的相互作用排除在外。在模型所采用的函数形式方面,多数模型不考虑高阶相互作用,且对两两摄食作用也进行了不同程度的简化[26,28,32—33]。这些不同的函数形式可看作是相互作用强度的具体表现,在此基础上可分别构建各类食物网动力学模型。
1.2 非线性功能反应
从消费者的角度出发,C-R相互作用可用功能反应函数来表示,即单个消费者在单位时间内摄食的资源数:
fC(C,R)=C×g(C,R)
(3)
式中,C是消费者的种群密度,R是资源的种群密度,g(C,R)是功能反应函数,即单位消费者的摄食率。功能反应分为捕食者依赖型和猎物依赖型,前者与猎物及捕食者的密度都有关,而后者则仅依赖于猎物的密度[34—36],并可按形状进一步分为Holling I型(线性)、II型(双曲线型)和III型(S型)[37—38]。Holling II型和III型功能反应函数可用基于酶动力学的模型表示[39]:
(4)
式中,gmax(量纲:h-1)为最大进食速率,R0是半饱和密度(量纲:m-2),即当捕食者的摄食率达到最大摄食率的一半时的猎物密度。h为无量纲希尔指数,设置为1则生成的函数为II型;设置为2则为经典意义上的III型。以此为基础可建立不同类型的消费者-资源模型,例如Rosenzweig-MacArthur模型[40],并在此基础上进一步构建食物网模型。在此类模型中,相互作用强度表现为各个具体的参数,或者以一些非线性函数的形式表现[41]。
1.3 Lotka-Volterra型模型
如果令功能反应函数为线性,可得到基于Lotka-Volterra捕食者-猎物方程的食物网模型[42—43]:
(5)
式中,Xi是种群密度,bi是第i个物种的内在增长率(或衰退率),αij是相互作用矩阵A的元素,表示相互作用强度,描述单位物种j对单位物种i增长率的影响(量纲:n-1t-1)。这也是大部分研究中所采用的相互作用强度的定义,下文中“相互作用强度”一词如未专门说明即为这一含义。
1.4 群落矩阵
在食物网研究中,可通过对方程(1)在某个平衡点进行线性化得到群落矩阵。首先,构建雅可比矩阵J,其元素Jii定义为:
(6)
然后,将所需评估的平衡点代入雅可比矩阵,就得到了群落矩阵M[10]:
(7)
对于一个非线性的系统而言,往往存在多个平衡点,每个平衡点都对应一个群落矩阵。此时,向量X中的元素不再表示各种群的绝对密度,而是相对于该平衡点的偏离值;对角线元素Mii表示该平衡点(X*)附近的种内相互作用强度;而非对角线元素(Mij,i≠j)表示种间相互作用强度,衡量物种j的单位密度的变化对物种i增长率影响的大小(量纲:t-1)。群落矩阵一般得自对非线性模型在平衡点处的线性化,作为局部稳定性分析的工具而被广泛使用,其稳定性可通过主特征值的符号和大小来判断,适用于环境扰动较小的情形[9,11,44]。有时作为探索性目的,也会直接对群落矩阵的元素赋值,并在此基础上探讨稳定性,包括May的经典研究[9]。
通过对Lotka-Volterra系统在内部平衡点AX*=-b处线性化,可得到雅可比矩阵:
(8)
这一矩阵反映出了基于群落矩阵的相互作用强度和基于Lotka-Volterra模型的相互作用强度之间的联系。
2 “模块-全网”双层稳定性框架
2.1 框架描述
食物网的动力学稳定性可定义为相互作用的各物种实现持续共存的可能性[29]。这其中包含两个方面:①各物种的平均密度不能过低,否则容易灭绝;②各物种密度的波动程度不能太大(频率过高及幅度过大),否则同样容易在低密度时灭绝。因此,维持稳定性的关键在于有效增加低密度种群的密度,以及降低高变异种群的波动程度。稳定性机制泛指各种类型的非随机相互作用方式,它们只占食物网整体参数空间的极小部分,具体可表现为某种特定的拓扑连接方式、某种特定的相互作用类型、参数空间中的某个较小的范围,以及上述各种形式的组合等。相对于随机情形而言,这些相互作用方式能使食物网中各物种的密度维持在较合理范围,不至过低或大起大落。
食物网作为一个整体,其稳定性是各物种所有相互作用(包括种内和种间)的综合结果。由于食物网中的物种数和交互数量之多(尤其是将相互作用强度的大小也纳入考量之后),巨大的参量空间使我们无法直接把握整体的稳定性。为打开这一黑箱,需要对食物网及其相互作用进行分解,区分出各种稳定性机制。一个合理的框架可为各种机制都安排恰当的位置,并帮助我们从整体上理解食物网的稳定性。May[14]曾提出先研究局部构成单位的稳定性机制,然后研究它们的组合方式,最终达到认识整个食物网稳定性机制的目的。经过众多学者的长期共同努力,尤其是McCann等人的工作[45],使得这一框架在近十年中逐渐成型(图1)。
模块由若干物种(一般为2—4个)以及它们之间的相互作用构成,可视为微型食物网。例如由C-R相互作用构成的两物种模块,杂食反馈环或两个C-R相互作用耦合构成的三物种模块,以及包含某些高阶相互作用的其他模块等。每个模块都表示物种间的某种能量传输结构,而这其中往往蕴含着潜在的不稳定性,表现为其中某个或几个物种的平均密度过低或者波动程度过大(包括指数型增长)。而模块的稳定性机制即通过对其中的相互作用的某些限制,以减弱这种潜在不稳定性。在一个模块中可存在多种稳定性机制,并可按从粗糙到精细分为不同层面:在较粗的层面上体现为定性机制,它由该模块所含物种的属性、模块拓扑结构、以及各交互强度之间的大致比例关系(例如C-R振荡的强度与资源自我调节的强度之比)决定;而在更精细的层面则体现为定量机制,即各交互的某些具体形式(非线性函数形式),以及相应参数的特定取值范围等。不同类型的模型所揭示的稳定性机制往往存在差别,简单模型作为对自然现象的粗糙模拟,所展示的一般是定性层面的稳定性机制(但往往也是更为普遍的机制);而复杂的非线性模型往往能呈现更精细的机制。
食物网全局层面的稳定性机制则意味着将各不同类型和稳定性的模块以某些特定方式组合起来。Cohen[46]转述了19世纪生态学家Lorenzo Camerano关于食物网动态的思维实验,后者将食物网视为大量会产生振荡效应的相互作用的组合。当其受到扰动时,各种不同频率的振荡会在整个网中传播,通过交互合并成一个相干的声谱[47]。在随机相互作用的情况下,食物网的物种数越多,连通性越大,整体稳定性遭破坏的可能性也越大;但当不同类型的相互作用以某种非随机方式耦合在一起时,则可能起到抵消这种不稳定振荡从而促进整体稳定的作用[47]。
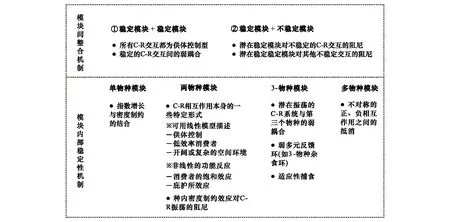
图1 “模块-全网”双层稳定性框架Fig.1 The “module-web” double-layer stability framework
2.2 模块层面的稳定性机制
2.2.1单物种模块
生产者是食物网中的基础物种,其种内作用包括两种效应:其一是种群本身的再生产过程,因其正反馈效应,可产生不稳定的指数增长;其二是种群在高密度时,种内个体之间发生直接竞争及由资源介导的间接竞争,表现出密度制约效应,是一个负反馈过程。这两者结合的最终结果是将种群密度的变化限于某个区间内,既不过高,也不太低(图2)。在食物网模型中,基础物种的种内动态常以logistic增长形式的非线性密度制约项表示。
2.2.2两物种模块
(3)两个单物种子系统通过摄食关系(即C-R相互作用)组成两物种子系统。C-R相互作用将资源的一部分生物量转移给消费者,这一过程虽然在总体上是一种负反馈,但是却很容易因反馈过度而产生剧烈振荡,是食物网不稳定性的首要来源。很多对食物网模块的稳定性机制的分析是围绕着如何削弱这一振荡来展开的[29]。在两物种模块中,这些机制可分为两个层面:①C-R相互作用本身的一些特殊形式,包括可用线性模型描述的机制(供体控制、低效率消费者以及开阔或复杂的空间环境等),和某些非线性的功能反应模式(消费者的饱和效应、资源的庇护所效应等);②交互双方的种内密度制约效应对C-R耦合的振荡所起到的阻尼作用(图3)。
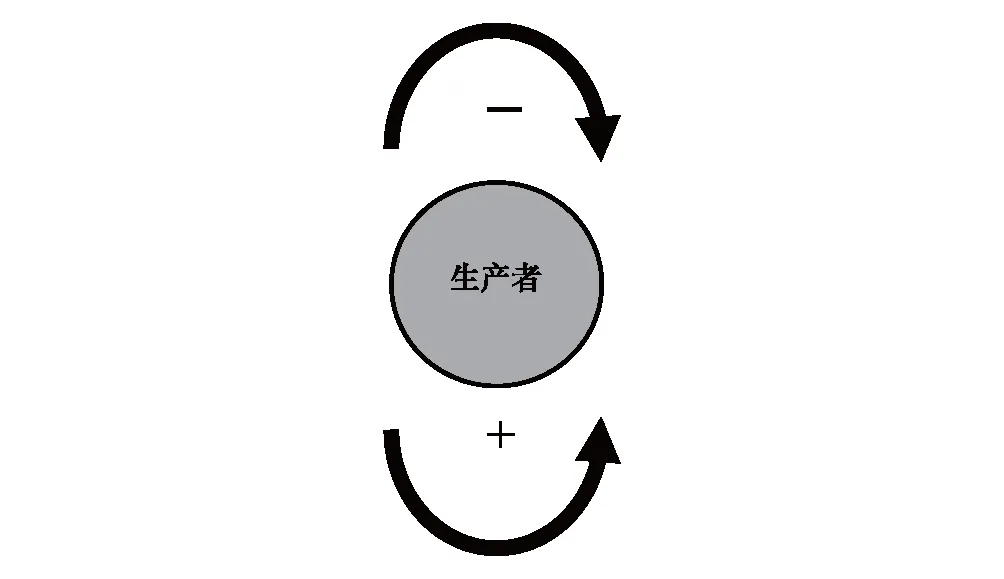
图2 单物种模块的两种反馈机制Fig.2 Feedback mechanism of single species module箭头表示作用方向, “+”、“-”分别表示正面效应和负面效应
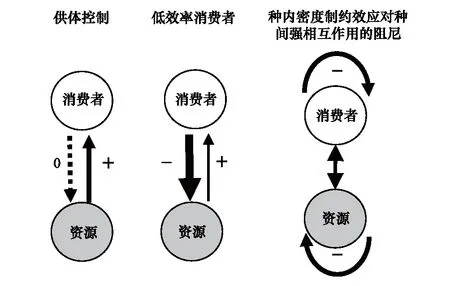
图3 消费者-资源相互作用中的稳定机制Fig.3 Stability mechanism in consumer resource interactions
(1)供体控制
供体控制指在C-R相互作用中,消费者对资源的丰度几乎没有负面影响[22,48],反馈关系因而被切断,振荡现象也就消除了(图3)。供体控制在自然界中广泛存在,如食腐、食屑等不以活体为食的摄食关系,以及只猎取年老及病弱的猎物的捕猎关系等情形。这一相互作用模式可用群落矩阵模型表示[22]:
(9)
对于资源(X1)而言,方程中没有明显的被捕食项,因为消费者(X2)吃掉的是死亡的资源(α11X1)中的一部分。当消费者的数量低于其数量与食物供应量之比乘以它们转化为新消费者的速率(α21)时,消费者就会增加。
(2)低效率消费者
在大部分非供体控制型营养相互作用中,消费者的效率往往很低,因为捕食者不会把杀死的猎物全部吃掉,而吃掉的部分也不会被完全同化。其结果有很大一部分能量从系统中漏出到了环境,这减弱了反馈作用,从而也削弱了振荡。反映在相互作用强度上,单位捕食者对单位猎物的负面效应往往比后者对前者的正面效应要大上不止一个数量级(图3)。对于Lotka-Volterra捕食者-猎物模型,其群落矩阵为:
(10)

相比于陆地生态系统,水生生态系统中消费者和资源之间的化学计量更接近,消费者的效率因而更高,其耦合强度也因而远高于陆生系统[50],这也使水生系统相对更不稳定[51]。类似地,相比泛食者而言,专性捕食者一般对资源有更高的攻击率,因而由专一性摄食关系主导的食物网也往往更不稳定[52—53]。
(3)开阔或复杂的空间环境
凡是能有效减弱C-R交互中的耦合强度的因素,都可能缓解振荡,从而提高稳定性。例如,生态系统的空间尺度的增大可减弱C-R系统中的耦合强度。这是因为各物种都存在特定的感知和活动范围,在这个范围之外,捕食者的捕食效率将会下降。在空间狭小的生境中,物种间往往因强烈的相互作用造成不稳定,并可能导致部分物种丧失。在实验研究中,人们发现空间受限的微宇宙系统更不稳定[2,54]。在野外观测中,“种-面积曲线”表明物种丰富度随着面积的增加而增加[55],岛屿生物地理学则表明岛屿、湖泊和破碎栖息地的灭绝率比较高[45,56]。同理,复杂生境如海洋中的珊瑚礁、红树林,陆地上的雨林等,生物多样性也往往较高[57],这一方面固然是因为创造出了更多的微生境(从非生物因子的角度),同时也是由于复杂的空间环境降低了捕食者和猎物之间的相互作用强度(从生物因子的角度)。
(4)非线性交互
如前所述,C-R相互作用存在多种类型的非线性功能反应模式。如果在资源密度升高时,消费者对其的作用强度并不随之快速上升,则将很可能缓解这一交互中潜在的振荡。自然界中的消费者因受到处理食物能力的限制,摄食速率往往随着资源密度的增长而降低,使得其种群不会过快增长,从而避免了对资源物种过度捕食情况的发生。大体型的捕食者由于生长和繁殖速率较低,这一效应表现得更为显著。此外,如果在资源密度较低时,消费者能减少对其的捕食,也将防止后者的数量过低而灭绝。在自然界中,庇护所的存在使捕食者无法接近或难以找到猎物,从而减缓猎物数量的进一步下降[58]。复杂生境中多样性较高,在较粗层面上的机制是因平均相互作用强度的降低,而在更精细的层面上则还在于其为各物种提供了更多的庇护所[38]。
(5)种内耗散效应对C-R振荡的阻尼
密度制约效应不仅存在于基础物种,在高营养级物种中也广泛存在,表现为领地效应、寄生虫和疾病、种内个体间干扰性竞争,以及种内捕食等[59]。但高营养级物种本身不像基础物种那样存在种群增长的机制,因而其种内密度制约效应的稳定性机制是在与其资源的相互作用过程中体现的。C-R系统中消费者或(和)资源的种内自我调节作用,可以对摄食关系造成的振荡起到阻尼的作用,从而增加这一系统的稳定性(图3)。此时C-R系统的稳定性取决于耦合项强度相对于种内作用项强度的比值。McCann对Rosenzweig-MacArthur型系统进行剖析后发现,如果对参数的改变使耦合项相对于损耗项的物质(或能流)通量增加,则处于振荡状态的C-R系统会变得更不稳定。从群落矩阵的角度来看,这相当于随着C-R系统中的种间相互作用强度(非对角线元素)相对于种内相互作用强度(对角线元素)的增加[45]。
不同的物种调节自身种群密度的能力并不相同,一些学者认为大多数物种至少在某些时候会经历微弱的自我调节,而另一些则认为只有初级生产者和顶级捕食者能在相当程度上自我调节[60—61]。
2.2.3三物种模块
食物网中的三物种模块按拓扑结构可分为:简单食物链、开发性竞争、表观竞争、杂食关系。而在考虑相互作用强度的情况下,则可将这些模块中的交互方式分为3类:①两个强耦合物种组成的C-R系统与第3个物种之间的弱交互,此时可认为该模块由两个子系统构成,这一模式可存在于简单食物链、开发性竞争和表观竞争中(图4);②3个物种中两两之间都存在摄食关系而形成的多元反馈关系,这存在于杂食关系中(图5);③3个物种因适应性捕食关系而存在高阶相互作用,这可以存在于表观竞争和杂食关系中。
(1) 潜在振荡的C-R系统与第三个物种的弱耦合
当两个或以上的强振荡之间发生耦合,往往会造成种群的大起大落,甚至灭绝。但若潜在振荡的C-R子系统通过较弱的连接与另一个具有较高种内稳定性的物种进行交互,则后者往往会分流前者的一部分能量,这通常会削弱其振荡,增强其稳定性(图4)。反之,一个相对稳定的C-R系统也可以被其他物种通过强耦合激发,从而变得不再稳定[45]。在简单食物链模块中,营养级联效应(trophic cascade)使较弱的顶级捕食者可以抑制中间消费者的增长,从而缓和其与资源交互中潜在的振荡[62](图4)。在开发性竞争中,较弱的第二消费者减小了共享资源的增长率, 从而抑制第一消费者与资源交互中潜在的振荡(图4)。在表观竞争中,消费者通过与第二资源的弱交互作用可维持一定的种群密度,从而起到控制具有不稳定种群动态的第一资源的效果(图4)。在生态农业的实践中,常根据这一机制在农作区营造吸引天敌的环境,以维持其一定种群密度,从而控制可能的害虫爆发。
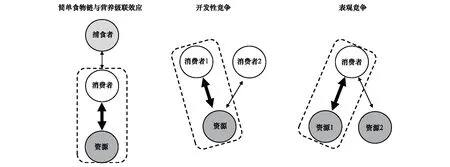
图4 潜在振荡的C-R系统与第3个物种的弱耦合Fig.4 Weak coupling between the potentially oscillating C-R system and the third species
(2)低环重杂食环
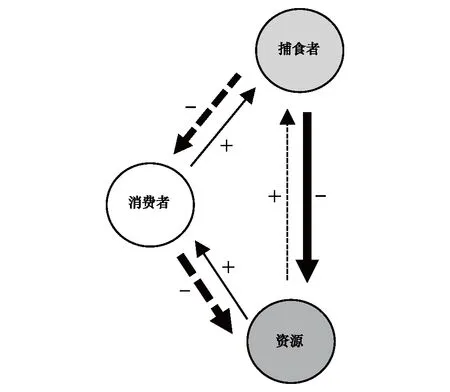
图5 杂食模块中的两个反馈环Fig.5 The two feedback loops in the omnivore module 实线为顺时针反馈环,虚线为逆时针反馈环。两个反馈环分别至少存在一条较弱的边,从而降低了环重 [64]
除了C-R间形成的两物种反馈环,食物网中还可能存在由杂食关系形成3个物种乃至更多物种的反馈环[63]。三物种杂食关系中存在两个反馈环:一个包含两个负效应和一个正效应,整体表现为正反馈;另一个包含两个正效应和一个负效应,整体表现为负反馈(图5)。正反馈显然是系统的不稳定因素,而负反馈则因存在发生振荡的可能,也是潜在的不稳定因素。反馈环中相互作用强度绝对值的几何平均值称为环重,该值越大则系统越不易稳定[1,25,64—65]。通过对土壤食物网的局部稳定性分析(采用群落矩阵元素的值作为相互作用强度),Neutel等人[64]发现在三物种杂食环中,若假设杂食动物摄取低营养级的资源多(因其生物量多),摄取较高营养级的猎物少(因其生物量少),则将导致杂食环中总是存在较弱的链接,这减小了环重,从而有助于稳定。对于更多物种组成的杂食反馈环,则其中一般也包含了相对较多的弱链接[66—67]。
(3) 适应性捕食
适应性捕食是指消费者在与两种或以上的资源交互时,会随各资源物种密度的大小而动态调整对其捕食强度的一种捕食策略。这是一种常见的高阶相互作用,消费者对资源A的捕食率不仅受到它自身的密度以及A的密度的影响,同时也受到另一资源B的影响,当A的密度小于某个临界值时,它可能放弃对A的捕食,而增加对B的捕食率。对于各资源物种来说,捕食作用在其密度相对较高时增强,防止其过度增长,而在其密度相对较低时减弱,使其避免灭绝[45]。而对于消费者来说,早先MacArthur[8]就运用思维实验指出,泛食者通过将风险分散到多条途径来获得稳定性,因为当某条途径不再可行时,它可以通过其他途径得到缓冲。这一稳定机制的前提之一是消费者的反应速度足够快,能及时调整其策略,不然反而有可能造成振荡。
适应性捕食在食物网中的具体案例包括表观竞争、杂食链中捕食者对基础物种和中间物种取食强度的切换等。①表观竞争是一个消费者与两种资源之间的营养交互,消费者可以通过权衡改变消费倾向, 转向第二种资源, 降低攻击第一资源的效率, 从而抑制潜在的振荡性C-R交互。不同的资源物种由于生活史对策不同(如K对策和r对策),或位于不同的生境从而受到不同环境因子的影响,往往具有异步的资源动态,这正好在消费者的适应性捕食策略下通过平均化效应而获得稳定[68]。②在三物种杂食关系中,如果捕食者以密度依赖的方式调节其对其中间物种和基础物种的捕食强度,那么杂食系统将能保持稳定[69—70]。捕食者对中间物种的强烈抑制产生营养级联效应,即导致其密度很低,而使基础物种处于高密度,此时捕食者若改变策略而将注意力转向基础物种,中间物种就从被抑制中释放出来而得到恢复。这一行为适应能力防止了消费者与特定资源发生持续的强相互作用,因此得以消除潜在的振荡。
2.2.4多物种模块
Wootton和Stouffer[71]发现连接度较高的物种的正面作用和负面作用存在着不对称性。即如果其存在很多种猎物(即有许多正面作用),则其捕食者的数量就较少(较少的负面作用);反之亦然。同时,对于数量较多的一类作用,其强度往往较弱,并被一些较少的相反类型的强相互作用所平衡。反映在天然食物网的营养结构上,则是食物网底部附近的物种有很多捕食者,但猎物较少;而顶部附近的物种则正好相反[18,71—72]。
2.3 模块间的整合机制
对各类模块的稳定性机制的了解只是一个基本前提,更困难的是探索动态模块如何组合在一起,构成自然界中的复杂食物网。不同的食物网因其生物物理条件的差异,所倚重的稳定性机制也会不同,其所含模块类型及整体构成方式也就纷繁复杂。即使对于同一个食物网,也可以有不同的解析方式。一般来说可将模块间的组合方式分为两类:①多个本身具有一定稳定性的模块通过较弱的相互作用结合起来,共同组成稳定的食物网;②某些具有较高稳定性的模块通过某些方式“帮助”另一些稳定性较差的模块,共同达到整体的稳定。食物网可由各类模块通过这两种方式构成。
一种最简单情形是,整个食物网可由各物种通过供体控制关系构建。如前所述,在供体控制的C-R相互作用中,消费者和资源之间是解耦的。以供体控制构建的食物网模型具有天然的稳定性,其局部稳定性与物种数及连接度的增长无关[22]。
其次,可将食物网看作由稳定的C-R交互通过弱耦合而构成。只要所有的C-R交互都不存在因强耦合导致的振荡,在整体层面也可以取得稳定。Tang等[73]通过对15个真实食物网的参数化,认为消费者与资源之间的两两相互作用中的不对称性(即低效率捕食者效应)解释了绝大部分的稳定性原因,而所有其他结构特征组合的影响则要小得多。此时只需要考虑两两相互作用即可,不需要考虑大范围结构[73—74]。
再次则是认为食物网中存在着较强(从而不稳定)的交互,但是假设不稳定性都来自C-R交互。一些相应的稳定性机制对这些不稳定的C-R交互发挥了缓和的作用,从而使得整个食物网得以保持稳定。由于只考虑C-R两两相互作用中的振荡,从某种意义上说,这种方法类似于在线性稳定性分析中抛弃非线性项[75],这种简化在研究动力系统中耦合振子的作用时很常见,且在生态学理论中有着悠久的历史[76—77]。
最后,则需要将更多的不稳定交互类型纳入考量。例如,Neutel和Thorne[78]认为,基于两两交互强度信息的方法不足以描述食物网中强链接与弱链接的复杂组织,还需要考虑其他的反馈结构[63],特别指出三物种环的强度是维持稳定性的关键[66,79],并提出了一个食物网稳定性的指标[25]。Kondoh[24]将加勒比海地区的食物网解构为大量的三物种杂食环[80],这些底层模块具有不同的内部稳定性,并通过两种方式构成大型的持久性系统:①多个稳定模块组成更大的子网乃至食物网;②以稳定模块支持不稳定模块的方式组合。
3 基于等级体系的食物网稳定性框架
3.1 双层框架之不足
上述“模块-全网”双层稳定性框架可用于对简单食物网的稳定性分析,但是面对真实食物网仍存在很大不足。首先,在前述模块稳定性机制中,其实某种程度上已包含了两个层级。例如,三物种系统中的C-R系统与第三个物种的弱耦合,实际上可视为由一个两物种子系统(图4中虚线框内的部分)与另一个物种构成的高层次系统。其次,模块一般只包含2—4个物种,而真实食物网中的物种数则往往要多得多,且相互作用强度的差异也可能很大(例如景观尺度上的食物网),此时只考虑两个层次往往不够。第三,罗列出一些具体的稳定性机制仍只是认识食物网稳定性的第一步,我们还需要去了解各种机制之间的关系,以及各层级之间的关系。这里,我们尝试将上述双层框架加以扩充和改进,提出一个基于等级系统的食物网稳定性框架,以便深化对食物网稳定性机理的认识,以及应用于更广泛的场景。
3.2 食物网的等级结构
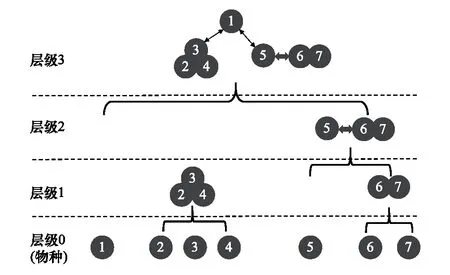
图6 食物网的等级结构的演示Fig.6 Demonstration of hierarchical structure of food webs
从自上而下的角度看,系统分析的关键在于找到关节点进行切割,得到一些相互作用的子系统,使得子系统内的作用较强,而子系统之间的耦合较弱。如果子系统结构仍很复杂,则可进一步分解,直到基本要素,从而得到一个树状的包含型等级体系。从自下而上的角度来说,如果一个系统中既包含强交互,又包含弱交互,且强交互可以通过组合而耗尽,那么将形成子系统,直到所有强交互在其构建中得到利用,然后这些子系统将通过较弱的交互而连接成更大的系统[81]。现实中不同类型的系统往往具有不同的可分解性。如前所述,食物网中的相互作用强度的差别可达到若干数量级,这使得其成为一个近可分解系统,可应用等级系统框架对其进行分析。具体来说,一些物种(层级0)之间通过相互作用,构成了初级的子系统(层级1),更高层级的子系统则可由若干个其下各层级的子系统组成,其中也可包含最基本层级(即单个物种)(图6)。
3.3 各层级的稳定性机制
在构建了等级系统之后,隶属于两个子系统的多个物种之间的多个交互可被归并为子系统之间的两两交互,从而简化了对食物网的描述。此时,上述的“模块-全网”双层框架中的模块层面的各类稳定性机制,以及模块之间的整合机制,都可对应于等级体系中某个层级的子系统,从而可被视为子系统的一种属性。并且,由于等级系统的递归性,同类型稳定性机制也可能表现在不同层级上。其中,最重要的机制可能是适应性捕食,它不仅可以指消费者对两个或多个资源物种的耦合,还可以是对不同的多个物种子系统的耦合。例如,很多经验研究指出食物网具有分室结构,这是因为一些生物物理因素使系统中的耦合强度存在较大差别,主要与环境中的亚生境[82]、群落内的系统发育模式[19,83], 以及不同的能量通道[84]有关。不同的分室之间则往往由具有移动能力的适应性捕食者耦合起来,一些小型消费者将来自微生境的资源耦合起来, 而大型消费者将宏观生境中的资源耦合起来。此时,每个分室可被看作一个子系统,而捕食者对其内部多个物种的捕食作用可被归并为捕食者与该子系统整体的交互。通过在各个空间尺度上重复这一营养结构,景观尺度上形成了嵌套形式的等级结构[85]。Rooney和McCann[29]的研究指出,同一消费者所耦合的多条能量通道中往往有快和慢之别,快速能量通道中的种间相互作用较强,种群往往体型更小、增长更快、生物量周转率更高;而慢速能量通道则相互作用强度较弱,往往包容了更高的多样性。在这种结构中,当系统受到干扰时,快速通道中的种群反应迅速,从而使捕食者种群迅速恢复。而慢能量通道的存在则提供了一种保险效应,使得捕食者在因振荡而陷于低谷时,能维持一定的种群密度。在近海以及湖泊食物网中,源于浮游植物的快速通道和源于底栖碎屑的慢速通道由高营养级鱼类的捕食行为耦合在一起,而慢速通道中的浮游动物和鱼类群落多样性更高[86—87]。在其他食物网中也观察到了类似的耦合现象,包括森林生态系统中的树冠-林下能量通道的捕食性耦合[88],土壤生态系统中的真菌和细菌能量通道的捕食性耦合[89],以及灌木群落中食果鸟类的资源耦合[90]等。
3.4 层级间的关系
大多数人造系统(例如机械系统)是组合系统,即先有局部,后有整体[91],其局部的稳定性是不言而喻的。而诸如有机体之类的复杂系统则是分化系统,即先有整体,各局部是系统在演化过程中因分化而逐渐形成的[91],其局部的稳定性依赖于整体。生态系统处于这两者之间,其局部的稳定性在很大程度上是其本身的属性,但也在一定程度上依赖于整体。对于食物网而言,每一层级的子系统对内具有维持自身一定程度稳定性的属性,又能与其他子系统进行适当耦合。因此,为了深入理解食物网维持稳定的整体机制,除了从自下而上的角度分别考虑各层级稳定性机制,还有必要考察层级之间的关系。
从动力学角度看,等级系统中的不同层级往往存在过程速率的差异,低层级以快行为为特征,而高层级以慢行为为特征。具体来说,食物网不同层级的子系统处理不同频率的振荡问题,低层级子系统中的稳定性调节机制,能在一定程度上缓和高频振荡,却不能消除低频振荡。并且在其本身调节的过程中,也可能会产生出一些较低频的振荡,而这需要高层级的稳定性机制去处理。最终的结果是系统在整个频谱上的振荡都得到缓和。例如,Yodzis和McCann[76]表明,在简单食物网模型中,可以使用功率谱将复杂动力学特征分解为与潜在C-R相互作用相关的各个频率的组合。
3.5 稳定性机制的效率
从能量学的角度看,食物网是一个自组织耗散结构系统,维持稳定的关键在于能量在整个系统中的有序流动及最终耗散。从某种意义上说,各种稳定性机制可看作通过能量耗散换取振荡的减弱,而这意味着在某些物种的平均密度过低和振荡过于剧烈之间的权衡。不同的机制在这一权衡中的效率存在差别,即为了减弱振荡所需要耗散的能量的多少。多数机制是低效的,例如:物种对自身的调节往往是通过增加耗散而达成的;生境异质性会增加捕食者搜寻猎物时产生的消耗;各类动物和植物对防护性结构的投入也增加了捕食者或消费者在摄食和同化过程中的消耗。只有少数机制,如供体控制、适应性捕食、潜在振荡的C-R系统与第三个物种的弱耦合等,能够更有效地改变能量在不同子系统之间的分配,即把能量从潜在的破坏性振荡中引开,补充给平均密度较低的物种,从而得以将有限的能量用于维持更多的生物量和更高的多样性。除了不同机制间的效率差别外,同类型机制也因具体条件的不同而存在着效率的差异。
效率也受到能量输入的形式和大小的影响。能量往往伴随着一定程度的振荡而存在,某一层级的稳定性调节机制,能在一定程度上缓和该子系统内的高频振荡。每个子系统所能处理的能流的大小存在上下限。如果能流不足,可能导致某些物种的平均密度太低而无法存续;而如果能流过多,则富余的能量可在系统内制造不稳定。按照能量的流向,可将进入子系统的能流分为3部份:一份在子系统运作中耗散掉;第二份以较低振幅的形式留存于子系统内;最后一份则转移为较低频的振荡的形式,交由更高一层级处理,或者漏出系统外。例如低效率消费者机制使得能流离开系统进入环境;捕食者的饱和效应机制拒绝接受更多能流进入C-R交互子系统。对于某层级的子系统而言,较优的稳定性机制意味着及时且适度的反馈,从而以相对较小的耗散达到最大程度抹平振荡、且较少漏出系统外或转移到更高层级。而对于食物网整体而言,则还意味着各层级之间的相互配合,紧密衔接。
4 结论与展望
4.1 小结
食物网是生态系统中的核心组织,是理解生态系统运行机制的重要出发点。而动力学稳定性则是食物网结构维持、功能发挥和动态演化中的重要制约因素。对食物网动力学稳定性的研究发端于20世纪70年代著名的“复杂性-稳定性”论辩,早期关注的主要是拓扑结构的影响,继而发现相互作用强度的重要性,并逐渐提出了一系列模块层面的稳定性机制,使得May当初提出的构建食物网稳定性的双层框架成为可能。本文梳理了各类模块层面稳定性机制和全网层面对各模块的整合机制,从而使这一框架得以更清晰地呈现。在此基础上,进一步提出了一个基于等级系统的框架,并从动力学和能量学角度对各层级内部的稳定性机制以及层级之间的关系进行了初步探索。然而框架的进一步构建还需要建立相应的数学模型并进行有效性检验、以及阐明其在真实食物网中的适用性等,本文所做的只是提供一些思路。
4.2 研究展望
4.2.1从食物网到生态群落
本文所介绍的稳定性机制仍远不足以代表真实的生态群落,需在多个方向上加以拓展和补充。①文中描述的稳定性机制大都局限于等级系统的较低层级,即只包含少数物种的模块,在更高层级或可存在一些其他稳定性机制,尚待进一步探索。②在食物网的框架内,非线性的功能反应模式和多物种高阶相互作用模式中可能蕴含了新的食物网稳定性机制[92—94]。③如前所述,食物网只考虑物种间的摄食关系,暗含了其他种间关系以及与非生物因子的相互作用并不重要的假设,因而是生态群落的一种简化描述。综合考虑群落中的各类相互作用显然将能展现更完整的群落动态[95—96]。例如,由于缺乏对基础物种间竞争的描述,食物网模型忽略了关键种捕食,以及资源竞争在群落构建中的作用[28]。而营养级内的水平多样性的互动效应也被证明对群落稳定性具有重要意义[84]。当前的研究正在试图将各类相互作用纳入统一的生态网络,如García-Callejas[33]将生态网络的研究范式归为3类:扩展食物网、多层网络和平等基础网络。④本文中的模型都假设群落动态只依赖于各种群的丰度,而在现实情况下,一些次级种群参数如年龄结构、空间分布、季节变化也会影响群落动态。例如,在水生生态系统中,特定的年龄结构可能会抑制C-R相互作用中的大幅度振荡[97];在破碎的景观中,三物种模块可通过某些独特的模式持续共存[98]。
4.2.2从动力学稳定性到食物网结构的综合框架
传统上,常按能量流动将食物网整体结构划分为若干个离散的营养级[99—101],然而由于杂食的广泛存在,营养级的概念并不能很好反映食物网的结构。为每个物种赋予一个营养级指数暗含了食物网中所有物种之间存在着一种序关系,但这显然不合理。例如,一个可诟病之处是,顶级杂食性捕食者的营养级指数可能小于它的某个猎物。建立在动力学稳定性基础上的、按等级系统进行的食物网结构划分,将有可能使我们的认识更接近本质。需要提及的是,Johnson 等人[21]提出了营养一致性的概念,描述食物网中的各物种在多大程度上能够归入各个离散的营养级中,并认为较高的营养一致性对整体的稳定性有利[102]。然而,他们的论证是建立在无权的食物网之上的,对加权食物网很可能并不成立。
然而,动力学稳定性只是食物网结构的一个必要条件,自然界中食物网受到多种机制的塑造。Lotka[103]曾提出功率最大化原理,即生态系统的演化倾向于消灭存在的能量梯度,只要存在未利用的物质和能量,自然选择的结果将是增加系统的总生物量,以及增加系统中物质的周转率和通过系统的能量流。Odum[104]认为通过系统水平上的选择和进化的结合,生态系统向更高水平的动态平衡演化,以在系统层面上更有效地利用能量[105]。May[14]认为演化会使自然界群落趋向复杂和多样,因为这会令其对资源的利用更有效,然而复杂性又会导致不稳定,系统能达到的复杂性与环境的平稳程度,以及历史有关。Pimm[22]则认为自然界中食物网的模式受到各种生物和物理因素、动力学稳定的制约以及一些纯粹随机作用的影响。
因此,为得到关于群落结构和动态的更为深刻和完整的认识,需要综合考虑生物物理因素、动力学稳定性、系统对能流功率的追求、环境的平稳程度以及演化历史等。其中,生物物理因素如体型大小,决定了物种新陈代谢速率和行为模式等多方面的属性,限定了食物网格局的可能性空间[1,106]。系统对能流功率的追求方面,人们在食物网中发现了类似于克莱伯定律 (Kleiber′s Law,指有机体体型大小与新陈代谢率之间的幂律关系)的标度关系[107—109],而West等[110]和Banavar等[111]通过优化营养和能量输运网络的效率对标度关系的阐释,预示着食物网中很可能也存在着类似的优化机制。进一步的研究需要将这些不同的角度整合起来,从而深化关于食物网、生态群落和生态系统的结构、动态的认识。