Space Division Multiple Access for Cellular V2X Communications
2022-11-10DoaaSamiKhafagaMohammadZubairKhanMuhammadAwaisJavedAmelAliAlhussanandWaelSaid
Doaa Sami Khafaga,Mohammad Zubair Khan,Muhammad Awais Javed,Amel Ali Alhussan,*and Wael Said
1Department of Computer Sciences,College of Computer and Information Sciences,Princess Nourah bint Abdulrahman University,P.O.Box 84428,Riyadh,11671,Saudi Arabia
2Department of Computer Science and Information,Taibah University Madinah Saudi Arabia
3Department of Electrical and Computer Engineering,COMSATS University Islamabad,45550,Pakistan
4Department of Computer Science,Faculty of Computers and Informatics,Zagazig University,Zagazig,44511,Egypt
Abstract:Vehicular communication is the backbone of future Intelligent Transportation Systems(ITS).It offers a network-based solution for vehicle safety,cooperative awareness,and traffic management applications.For safety applications,Basic Safety Messages(BSM)containing mobility information is shared by the vehicles in their neighborhood to continuously monitor other nearby vehicles and prepare a local traffic map.BSMs are shared using mode 4 of Cellular V2X(C-V2X)communications in which resources are allocated in an ad hoc manner.However,the strict packet transmission requirements of BSM and hidden node problem causes packet collisions in a vehicular network,thus reducing the reliability of safety applications.Moreover,as vehicles choose the transmission resources in a distributed manner in mode 4 of CV2X,the packet collision problem is further aggravated.This paper presents a novel solution in the form of a Space Division Multiple Access (SDMA)protocol that intelligently schedules BSM transmissions using vehicle position data to reduce concurrent transmissions from hidden node interferers.The proposed protocol works by dividing road segments into clusters and subclusters.Several sub-frames are allocated to a cluster and these sub-frames are reused after a certain distance.Within a cluster,sub-channels are allocated to sub-clusters.We implement the proposed SDMA protocol and evaluate its performance in a highway vehicular network.Simulation results show that the proposed SDMA protocol outperforms standard Sensing-Based Semi Persistent Scheduling(SB-SPS)in terms of safety range and packet delay.
Keywords:ITS;vehicular network;cellular V2X;SDMA
1 Introduction
Autonomous driving and intelligent traffic management are the key features of the future Intelligent Transportation System (ITS)[1-3].Vehicles will be equipped with wireless transceivers that will allow communication and data sharing between vehicles on the road.While hardware sensors have range limitations and are not cost-effective,wireless communication provides a low-cost and longrange data-sharing solution.Thus,car manufacturers and different research organizations are actively working to standardize data communication between vehicles[4-9].
There has been a tremendous effort over the last decade to improve wireless networking for ITS applications.In this regard,two major technologies have become popular.The first technology is the IEEE 802.11p which works on Wi-Fi technology and connects vehicles in the form of a Wireless Local Area Network(WLAN).The second technology is the Cellular V2X(C-V2X)that uses Long Term Evolution(LTE)to communicate between vehicles.Although IEEE 802.11p has benefits for localized communications,it may not be able to meet autonomous driving requirements.Hence,future ITS will utilize C-V2X communications which provide high data rates and reliability[9-14].
For safety applications,vehicles are required to regularly share messages with each other in a geographical area.This provides updated mobility information of each vehicle to its neighbors.These messages are commonly known as Basic Safety Messages (BSMs).As these messages contain the position,speed,and acceleration information of the vehicles,this facilitates making intelligent drivingrelated decisions such as safe changing of the lane,applying sudden brakes,and optimal speed control of the vehicle[15-20].
The frequency of these BSMs is generally ten times per second,which means a vehicle must generate ten messages in a second and share them with all other vehicles in the neighborhood.As several vehicles try to access the channel within a short time interval,the probability of concurrent transmissions is significantly increased.Due to the ad hoc nature of message transmissions in the vehicular network,hidden nodes cause collisions and loss of BSMs[21,22].
C-V2X communications have assigned a separate mode of communications (known as mode 4)for safety message transmissions.Using mode 4 of C-V2X,vehicles are allocated sub-frames and subchannels without the involvement of infrastructure.A major challenge is to find an optimal allocation of these resources such that the number of BSM collisions can be reduced.Moreover,the dynamic nature of vehicular networks and the mobility of vehicles also make resource allocation a challenging task[23-29].
In this paper,we present the Space Division Multiple Access (SDMA) protocol for highway scenarios that reduce the number of BSM collisions.The key idea of the protocol is to divide vehicles into clusters based on their positions.Each cluster is allocated a separate sub-frame,and the sub-frame allocation is reused after a certain distance.Moreover,within a cluster,sub-clusters of closely located vehicles are allocated sub-channels within a sub-frame.Simulation results highlight the significance of the proposed protocol in terms of reduced packet collisions and network delay.
The major contributions of this paper are that we present a novel SDMA based protocol for highway vehicular scenarios that improve the reliability of the safety messages by reducing the number of collisions.We present a detailed explanation of the working of the proposed protocol and give insights on how to schedule simultaneous transmissions of vehicles without causing interference to each other.We also provide a detailed simulation analysis of the proposed protocol and compare it with two other techniques from the literature.
The paper is organized as follows.The working of C-V2X standard and literature review is provided in Section 2.The details about the system model and proposed SDMA based protocol are given in Section 3.The simulation results and performance evaluation are presented in Section 4.The conclusions of the paper and future work are given in Section 5.
2 Related Works
We provide an overview of the C-V2X standard in this section.We also explain the recent work in the area of resource allocation for C-V2X communications.
2.1 C-V2X Standard
C-V2X standard was developed by Third Generation Partnership Project (3GPP) in its release 14 and since then,small changes have been made in upcoming versions (15 and 16) to further improve it.C-V2X standard uses 5G communications to support communication between vehicles for autonomous driving applications.C-V2X standard supports two types of network communications,the first one is the infrastructure enabled communications using the Uu interface (radio link between the vehicle transceiver and the infrastructure enodeB) whereas the second one is the direct communications between the vehicles over PC5 interface(sidelink channel)[30-34].
There are four modes of transmission in the C-V2X standard,each differing in the way the resources are allocated.The first two modes support communications over the Uu interface.Modes 3 and 4 support direct communications.More specifically,mode 4 allows resource allocation without involving the infrastructure nodes.This allows faster resource allocation,and it is suited for safety applications[35-38].
The frame structure of C-V2X is shown in Fig.1.The resources are allocated in time and frequency domains.In the time domain,each resource is known as a sub-frame whereas,in the frequency domain,each resource is known as a sub-channel.Each sub-channel is further divided to carry two types of information,the control information is placed in Side-link Control Information(SCI)part,and the data part is transmitted in Transport Block(TB)part.

Figure 1:Frame and channel allocation in C-V2X
The medium access control for C-V2X is managed by Sensing-Based Semi Persistent Scheduling(SB-SPS) protocol.The protocol works by sensing the last 1000 sub-frames for packet collisions and only select collision-free sub-frames for transmission.Vehicles pick resources within a selection window of sub-frames.The selection window value is between 20 and 100 ms.Vehicles also use semipersistent scheduling in which the same resource is only selected with a certain probability.This is done to allow vehicles to choose different resources every time instead of choosing the same resource for all transmissions.
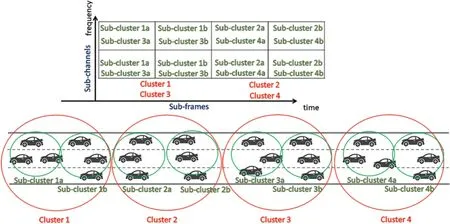
Figure 2:Proposed SDMA based C-V2X transmission
2.2 Literature Review
We provide a brief review of the current work related to C-V2X resource allocation in this subsection and as shown in Tab.1.The idea of resource allocation is to better utilize the available sub-frames and sub-channels such that vehicle collisions can be minimized.

Table 1:Literature review
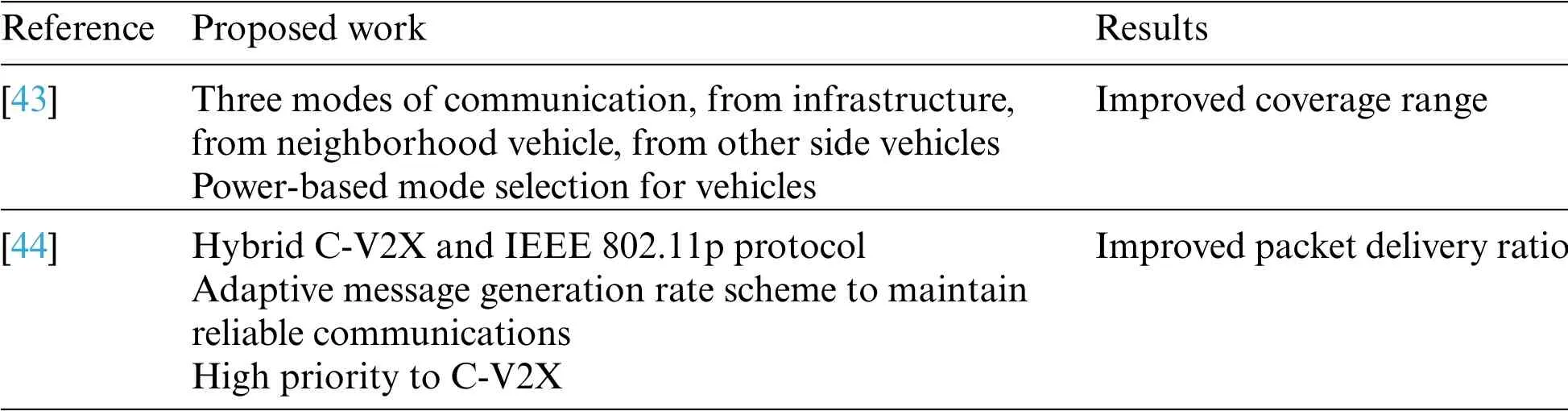
Table 1:Continued
To better detect collisions due to concurrent transmissions,the work in[39]proposes the idea of new time slots for C-V2X.The advantage of new time slots is the increased level of sensing and hence,reduction in packet collisions due to hidden nodes.A drawback of this scheme is increased overhead,however,the sensing accuracy improvement results in a higher packet delivery ratio.
The work in[40]proposes the use of announcement messages ahead of sending the safety messages.These announcement messages are broadcast in the neighborhood.The benefit of these messages is that other vehicles in the neighborhood refrain from sending messages within the current transmission and hence,packet collisions are reduced.This results in improvement of reliability of safety messages.
To reduce the interference and collisions of safety messages,the work in[41]presents a transmit power control algorithm.As transmit power has a direct correlation with the interference,the work adapts the transmit power to enhance the signal-to-noise ratio.In addition,the proposed work also uses an adaptive packet generation rate technique to reduce the network load and probability of collisions.Results show that the reliability of packet transmission is increased when using the proposed technique.
In[42],the authors propose a resource allocation protocol that uses Channel State Information(CSI) for better allocating the sub-frames and sub-channels in C-V2X.A many-to-many fuzzy matching is used to maximize the network capacity.Results show that the proposed protocol improves the network throughput of the vehicular network.
The work in[43]introduces the concept of three modes of communication for vehicles.In the first mode,vehicles receive a signal from infrastructure eNodeB whereas in the second mode the signal is received from the neighborhood vehicle.In the third mode,the message is received from vehicles located on the other side of the road.Based on the received power,the proposed protocol decides about appropriate mode selection.The proposed work improves the coverage range of the vehicles.
In[44],the authors propose a hybrid protocol that uses both C-V2X and IEEE 802.11p transmissions.To maintain reliable communications among vehicles,the time period of packet generation is controlled by the proposed scheme.Thus,the adaptive packet generation rate results in reduced channel load and an improved packet reception ratio.Moreover,a higher priority is given to C-V2X transmissions as compared to IEEE 802.11p due to its long-range.
3 Proposed SDMA Protocol for C-V2X Transmissions
In this section,we present the considered system model in this paper and also discuss the proposed SDMA protocol for C-V2X transmissions.
3.1 System Model
We consider a bi-directional highway scenario withXnumber of lanes.Each vehiclevis moving with a speedSvand we focus on a high vehicle density scenario.Each vehicle has an on-board C-V2X wireless transceiver and Global Positioning System(GPS)for accurate location information.The road is divided into fixed-length segments or clusters of size Lc.Within each cluster,the network is further divided into sub-clusters depending on the number of sub-frames allocated to the cluster.Let Scbe the number of sub-channels in a sub-frame,Tsbe the single sub-frame time,and TBbe the BSM time.
3.2 Proposed SMDA Protocol
The working of the proposed SDMA protocol is shown in Fig.2.The idea is to divide the road into clusters such that each cluster is allocated a different sub-frame.Moreover,vehicles within a cluster are further divided into sub-clusters and allocated to different sub-channels.As an example,if the vehicles are divided into four clusters such that cluster 1 and cluster 3 use sub-frames 1 and 2,and cluster 2 and cluster 4 use sub-frames 3 and 4 respectively.Within sub-frame 1 and 2 allocated to cluster 1,sub-cluster 1a uses sub-frame 1,and sub-cluster 1b uses sub-frame 2.In this way,sub-cluster vehicles transmit at the same time but at different frequencies.Similarly,vehicles from two different sub-clusters transmit at different sub-frame time slots.Moreover,vehicles from two different clusters are also allocated different sub-frame time slots.The sub-frames are only reused after a certain distance Rfsuch that the interference to the concurrent transmitting vehicles is reduced.
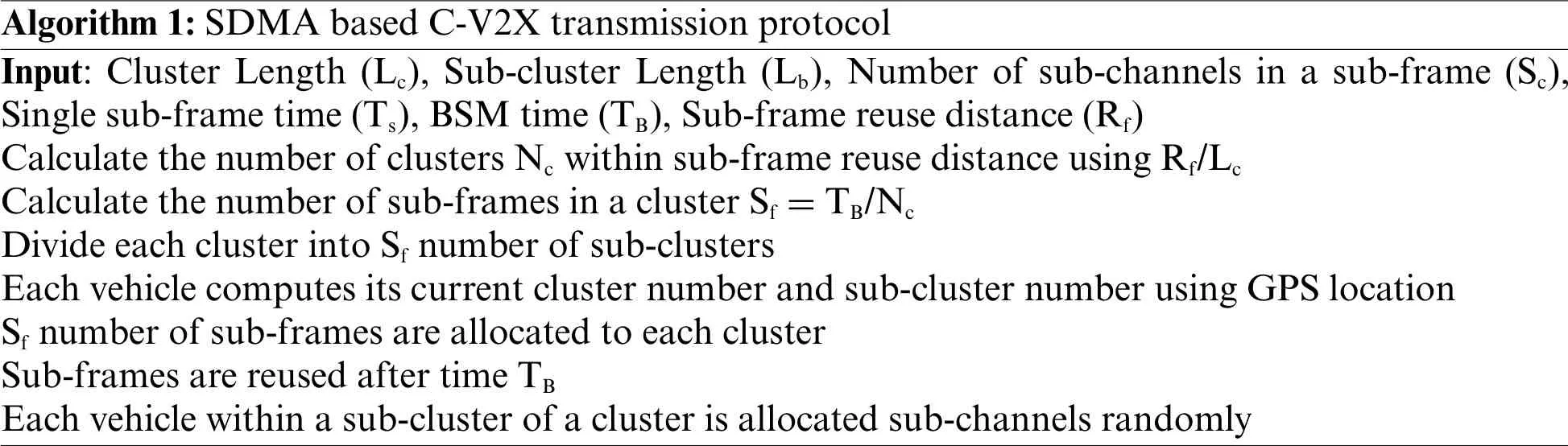
Algorithm 1:SDMA based C-V2X transmission protocol Input:Cluster Length (Lc),Sub-cluster Length (Lb),Number of sub-channels in a sub-frame (Sc),Single sub-frame time(Ts),BSM time(TB),Sub-frame reuse distance(Rf)Calculate the number of clusters Nc within sub-frame reuse distance using Rf/Lc Calculate the number of sub-frames in a cluster Sf=TB/Nc Divide each cluster into Sf number of sub-clusters Each vehicle computes its current cluster number and sub-cluster number using GPS location Sf number of sub-frames are allocated to each cluster Sub-frames are reused after time TB Each vehicle within a sub-cluster of a cluster is allocated sub-channels randomly
We present the proposed SDMA based C-V2X transmission protocol in Algorithm 1.At first,the number of cluster Ncwithin sub-frame reuse distance Rfis given as

The number of sub-frames in a cluster Sfcan be calculated as

We divide each cluster into Sfnumber of sub-clusters using a parameter called sub-cluster length Lb.This is done to allocate each sub-frame to a single sub-cluster.Each vehicle computes its current cluster number using GPS location.Furthermore,the vehicle also finds its sub-cluster number within the cluster using GPS location.The cluster and sub-cluster sizes are taken as fixed in our protocol as we consider a high vehicle density scenario in this paper.The rationale is that resource allocation is challenging in a high vehicle density scenario.At low and medium vehicle densities,competition for sub-frames and sub-channels is less and does not lead to a large number of collisions.
Vehicles in a sub-cluster select a sub-channel randomly and transmit their BSM.The subframe reuse distance Rfis selected based on interference values with a goal to schedule concurrent BSM transmissions far apart.As vehicles are moving continuously,their cluster and sub-clusters numbers change periodically,and hence,the sub-frames and sub-channel allocated to them also vary accordingly.
4 Performance Evaluation
In this section,we present the details related to the performance evaluation of the proposed SDMA protocol.This includes a description of the simulation parameters and an explanation of the obtained results.
4.1 Simulation Scenario
We present the simulation scenario in Tab.2.The road length is taken as 5 km.The number of lanes is 8.Vehicle speed is varied between 15-30 m/s.The vehicle density is taken as 200-400 vehicles/km.The sub-frame reuse distance is taken as 1000 m.The cluster length and sub-cluster length are taken as 100 and 10 m respectively.The BSM time is taken as 100 ms as vehicles need to send 10 packets per second to the neighborhood vehicles.The single sub-frame time is taken as 1 ms and there are 10 sub-channels in a sub-frame.

Table 2:Simulation parameters
4.2 Results
We compare the proposed SDMA protocol with two other protocols,namely the SB-SPS protocol[41]and the random scheduling protocol.In Fig.3,we plot the packet delivery ratio at different vehicle densities.The fading intensity taken is 3.It can be seen that the proposed SDMA protocol maintains a packet delivery ratio of more than 0.91 at different vehicle densities.On the other hand,SB-SPS protocol has a packet delivery ratio of 0.87 at a vehicle density of 400 vehicles/km.The random scheduling protocol has the worst performance,and its packet delivery ratio falls up to 0.74.
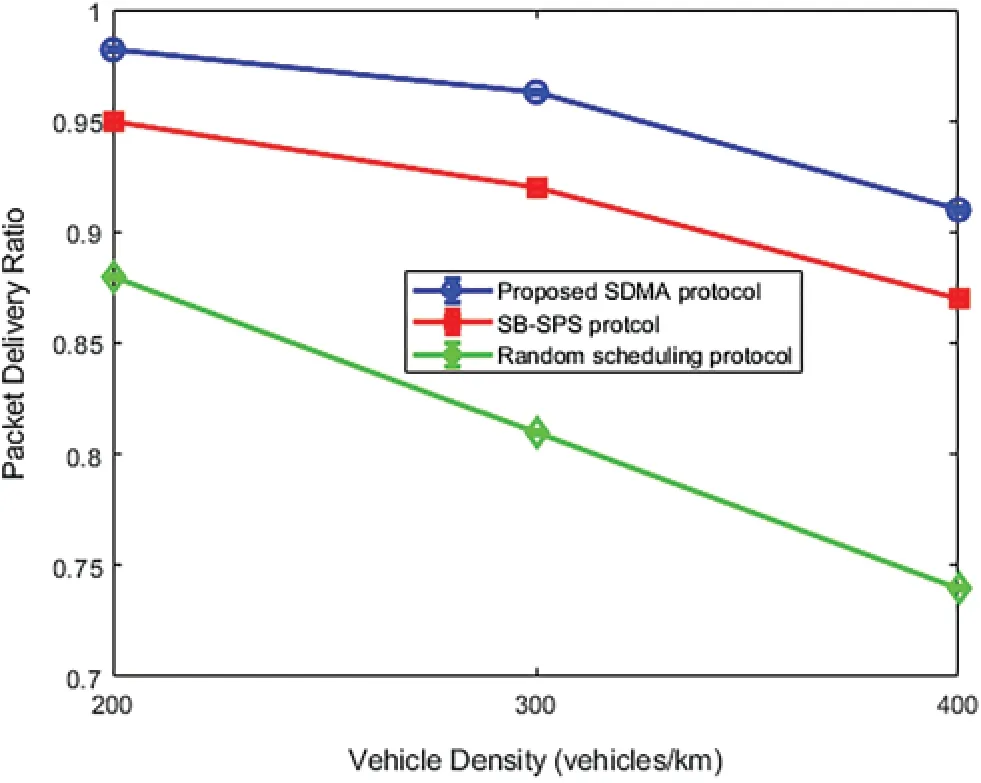
Figure 3:Packet delivery ratio at different vehicle densities
In Fig.4,we plot the end-to-end delay of three protocols in comparison.The proposed SDMA protocol delivers all BSM packets within an end-to-end delay of 1.6 ms.The SB-SPS protocol and random scheduling technique have an end-to-end delay of 2.9 and 5.1 ms respectively at a vehicle density of 400 vehicles/km.The results show that the delay of SDMA protocol does not increase as significantly as with the other two protocols at high density.This is because the SDMA protocol allocates sub-frames to the concurrent transmissions in a manner to reduce interference.
Results in Fig.5 show the packet delivery ratio at different fading intensitym.The vehicle density is taken as 300 vehicles/km.Results show that the packet delivery ratio of the proposed SDMA protocol is above 0.9 at different levels of fading.The performance of SB-SPS and random scheduling protocol is inferior at all fading intensity values as compared to the SDMA protocol.
The above results show that SDMA protocol maintains a packet delivery ratio of greater than 90% which is needed for safety applications.The result outperforms the standard-based SB-SPS protocol and random scheduling protocol in terms of delay and reliability.The packet delivery ratio of the proposed scheme is improved by 5% and 23% as compared to SB-SPS and random scheduling protocols respectively.Similarly,the proposed protocol reduces the end-to-end delay of safety messages by 44% and 68% as compared to SB-SPS and random scheduling protocols respectively.The performance improvement achieved by SDMA protocol is due to intelligent subframe and sub-channel allocation based on vehicle position.As all modern vehicles are equipped with GPS,using this information can significantly enhance the communication performance of C-V2X.The proposed SDMA protocol is suited for high vehicle density scenarios where distributed resource allocation is a major challenge.
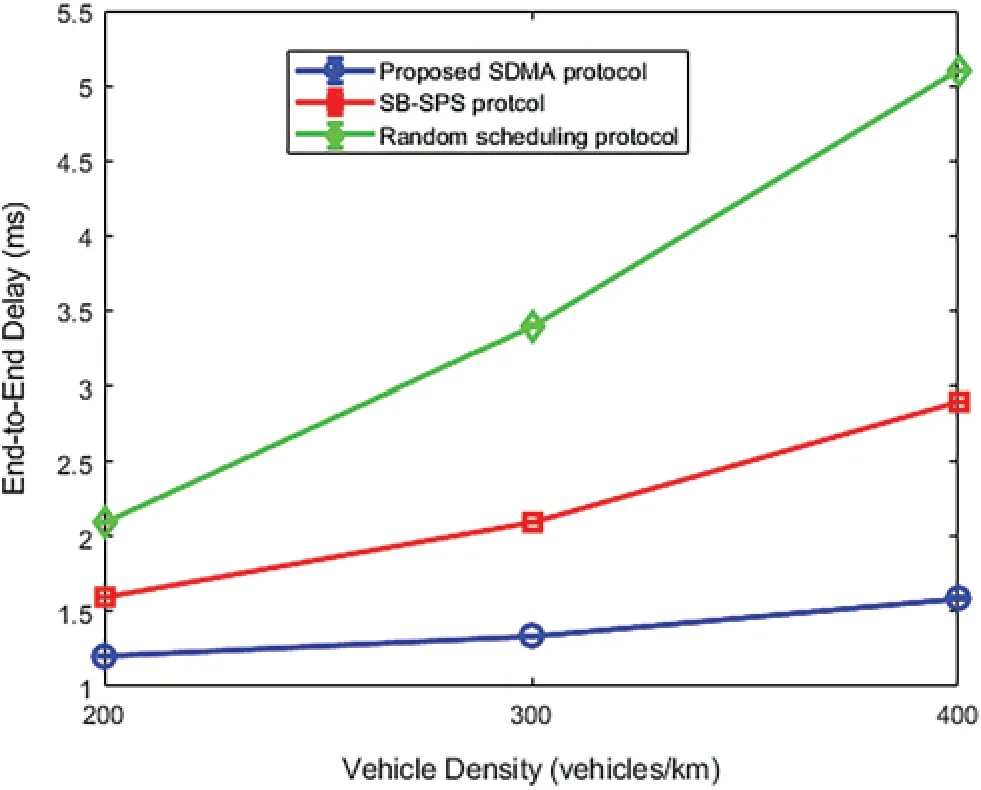
Figure 4:End-to-end delay at different vehicle densities

Figure 5:Packet delivery ratio at different fading intensities
5 Conclusion
In this paper,we propose an SDMA based transmission protocol using C-V2X communications.The proposed SDMA protocol works by dividing roads into clusters such that each cluster is allocated different sub-frames.The proposed protocol reuses the sub-frames after several clusters such that the interference due to concurrent transmissions is reduced.Simulation results show that the proposed SDMA protocol shows better performance as compared to SB-SPS and random scheduling protocols in terms of packet delivery ratio and end-to-end delay.In the future,we will work to adaptively control the cluster and sub-cluster sizes in a varying vehicle density scenario.
Acknowledgement:Princess Nourah bint Abdulrahman University Researchers Supporting Project number(PNURSP2022R308),Princess Nourah bint Abdulrahman University,Riyadh,Saudi Arabia.
Funding Statement:Princess Nourah bint Abdulrahman University Researchers Supporting Project number(PNURSP2022R308),Princess Nourah bint Abdulrahman University,Riyadh,Saudi Arabia.
Conflicts of Interest:The authors declare that they have no conflicts of interest to report regarding the present study.
杂志排行

Computers Materials&Continua的其它文章
- Recurrent Autoencoder Ensembles for Brake Operating Unit Anomaly Detection on Metro Vehicles
- K-Banhatti Sombor Invariants of Certain Computer Networks
- Robust and High Accuracy Algorithm for Detection of Pupil Images
- A TMA-Seq2seq Network for Multi-Factor Time Series Sea Surface Temperature Prediction
- Chosen-Ciphertext Attack Secure Public-Key Encryption with Keyword Search
- Evolutionary Intelligence and Deep Learning Enabled Diabetic Retinopathy Classification Model