基于巡检机器人的变电所全方位管控技术研究与应用
2022-11-08宋国栋
宋国栋
(应急管理部信息研究院,北京 100029)
0 引 言
供电系统是矿井安全生产的基础环节,随着少人化、无人化和智能化矿山建设进程的加速以及“用工荒”的逐步到来,煤矿电网无人化和智能化建设也逐步受到重视,变电所智能化程度的高低反映了快速处理安全隐患和突发事件的能力[1]。随着电力监控系统的普及,主要变电所场所具备了远程监测和操控的功能,但是现场监控盲区、环境工况缺失和设备健康隐患等因素成为了制约远程作业水平的瓶颈。因此,对供电回路和设备的全方位监测是远程安全作业的前提,也是提升变电所智能化水平的基础,反映了煤矿企业自身的精细化管理水平。
煤矿地面变电所从电力系统中接受和汇集电源,经过变换电压和交换功率从而为全矿分配电能,在保障全矿区安全供电方面具有重要作用[2]。《矿井维修电工操作规程》中“工作结束后和恢复送电前,必须逐点检查”等要求是对变电所作业特殊的规定,变电所设备的操作和维修工程中必须根据操作规程反复确认现场情况,包括环境参数、仪表状态、维修小车和停电标识等内容是否正常。传统的变电所通过温湿度检测和固定摄像头实现对供电系统环境的采集,通过电力监控系统实现对配电柜设备的操作,但是现场监控盲区和环境工况缺失严重影响电力监控系统的应用效果。
变电所全方位监控系统采用集巡检机器人和电力监控系统于一体,具备协同作业的新一代供电监控技术,首先,系统能够解决短路、漏电、失压、干扰和误动造成的越级跳闸大面积停电;其次,在远程操作供电系统期间,巡检机器人能够对目标配电柜的运行情况、周边环境和视频图像等内容进行全方位监控,增强快速反应和应急处理能力,预判供电健康隐患,提高供电安全水平。
1 机器人管控系统综述
1.1 电力监控系统
国外变电站监控系统起步较早,在理论研究和实际实践中都取得不菲的成绩[3]。早在1989年,国外专家就提出了变电站综合监控的观点,要求以实际应用为出发点,按照安全、可靠原则,实现全方位监控。近年来,国外专家提出了相关智能化变电站的设计标准,保证不同系统之间的交互透明[4]。
我国的变电站监控技术系统起步较晚,和国外的智能变电站监控系统相比较,还存在较大的差距,2011年变电站智能化迎来了爆发式増长,国家先后颁布了GB/T 2900.15、GB/T 2900.50、GB/T 2900.57等相关标准规范[5-7]。我国大部分工业用变电站还在使用传统的二次保护和监控系统,电动机或馈电线路仅使用独立的电动机保护器。
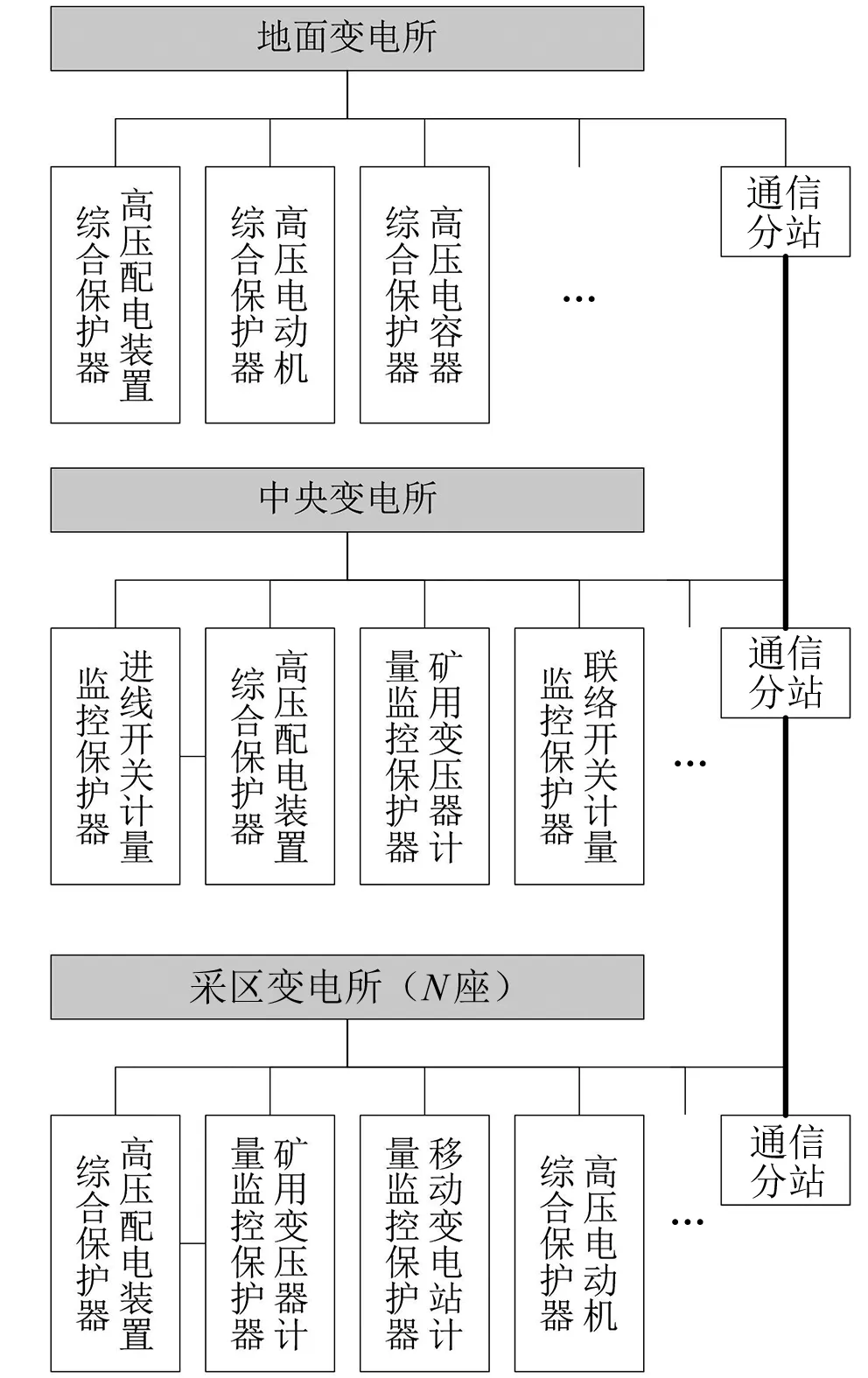
图1 煤矿供电系统图
煤矿供电系统一般由地面变电所、井下中央变电所、井下采区变电所以及其他供电设施组成。传统的电力监控系统在各个变电所配置有通信分站,通信分站通过总线方式、采集配电柜中既有综合保护装置数据,进而实现对供电系统的集中监控,如图1所示。
1.2 系统架构
变电站巡检机器人系统一般由巡检机器人,微气象及通信系统,以及监控后台等部分组成。通过通信接口可与变电所自动化系统、辅助设施以及供电系统中其他变电站进行信息联动,站内巡检机器人通过自身传感装置以及站内微气象传感装置联合获取变电站运行工况信息。基于巡检机器人的变电站管控系统架构如图2所示。

图2 机器人管控系统架构
2 巡检机器人功能设计
室内智能巡检机器人由行走系统、升降系统、拾音器、红外热像仪、人机交互界面、可见光相机、局放传感器等核心设备和其他辅助设备组成。对于煤矿地面/井下变电站,巡检机器人主要用于视频图像识别、红外成像测温和局放检测。
1) 视频图像识别
目前,变电站内配置的视频监控仅能实现对站内环境视频图像的回传,对仪表、开关和铭牌等仍需巡检人员前往现场读取记录。为满足自动化和智能化建设需求,巡检机器人具备对设备、表计等自主精确定位拍摄以及图像智能识别处理的功能;能够自动判断柜体指示灯状态、分合闸状态和仪表读数等设备运行状态信息,如图3所示。以此提高自动化管理水平,降低巡检人员工作强度,逐步脱离人工巡检方式。

图3 机器人图像识别
通过图像识别算法,可自动识别各类仪表读数、指示灯状态、开关状态和设备机械位置等信息。
2) 红外成像测温
电力设备在运行过程中,由于导体连接或接触不良、电压分布不均匀和泄露电流过大等原因,会出现不正常的发热现场。普通运维方式下,需运维人员手持红外测温仪定期巡检。在消耗人力和物力的同时,效率无法提高,已不能满足自动化运维的要求。
在巡检机器人上配备红外摄像仪,结合红外智能提取技术,自主获取设备和环境温度,实现对电力设备及环境温度的高密度、高颗粒度监测与多维度分析管理。通过连续监测高压开关动触头与静触头的运行温度,可确定触点和接头处的过热程度,当发生超温时能够发出报警指示,防止发热造成的电气设备事故发生。
3) 局放检测
高压电力设备在天气潮湿和绝缘污损等情况下极易发生局部放电,导致绝缘强度不断下降,是使高压设备绝缘损坏的一个重要因素。然而目前配电站房内没有能够在线检测高压柜和变压器局放的检测设备,无法实现对设备局放情况的实时在线监测。

图4 机器人局放检测
机器人搭载局部放电传感器,利用暂态地电波加超声波检测的手段获取电力柜局部放电数据,结合局放图谱库实现对设备局放的实时在线监测,如图4所示。局放检测结构最大伸缩长度15 cm,能够覆盖变电站巡检需求。
3 多系统智能联动
3.1 巡检机器人智能联动体系
机器人集控平台可与变电自动化系统和辅助设施等进行信息联动,实现多系统智能联动,形成一个全面、立体的智能管理系统,为变电站的智能化、信息化、自动化和现代化管理提供重要支撑。联动作业主要包括以下几个方面:
(1) 与变电自动化系统联动,调度每日的工作计划,推送给机器人进行现场作业监控。对于远动操作指令,机器人可进行现场检查表计、开关位置和指示灯状态等,确认操作指令是否正确执行。
(2) 当设备出现故障跳闸时,通过调度相关数据,把开关变位信息发送给机器人,机器人进行现场检查表计、开关位置和指示灯状态等,确认现场动作情况。
(3) 与站内监控系统协同联动,在设备操控时能实时显示被操作对象的图像信息;能与顺序控制系统进行配合,通过图像自动识别断路器、隔离开关和接地开关的分合状态。
越级跳闸和小电流接地是供电系统中常见的故障,本文以该两类故障为例,基于巡检机器人与电力自动化的智能联动分析防越级跳闸和小电流接地选线的应用。
3.2 防越级跳闸智能联动
一般来说,供电线路短、电压波动大、保护误动作和开关拒动是引起越级跳闸的主要原因[8]。巡检机器人通过自主移动巡检能够在事前诊断和时候确认方面辅助于防越级跳闸的识别和联动。
如图5所示,采区变电站发生故障前期,水平变电所巡检机器人侦测到电流异常,同时侦测到采区变电所一侧电流异常,调度采区变电所巡检机器人移动至电流异常的馈电开关处,异常数据实时反馈至变电自动化系统,由管控系统平台综合分析判断。经确认属于越级跳闸故障时,采区变电站综合保护装置向馈电开关发出跳闸指令,避免故障波及到其他供电场所。巡检机器人可进行现场检查表计、开关位置和指示灯状态等,确认操作指令是否正确执行。

图5 越级跳闸智能联动
3.3 小电流接地选线智能联动

图6 小电流接地选线智能联动
小电流接地选线与防越级跳闸相似,由巡检机器人通过对各变电所用电设备电参数的实时监测,相关参数主要包括供电线路零序电压、零序电流、零序无功功率、五次谐波无功功率和零序有功功率等数据,预先识别故障隐患点,经由电力自动化系统数据综合分析,确认故障点,选线系统结构如图6所示。
巡检机器人在智能联动的过程中主要对故障隐患点识别和联动后现场确认起到关键作用。
此外,巡检机器人在远程分合闸操作期间,通过机器人本体自主移动,定位至任一台开关设备,多角度对开关设备进行远程视频回传,能够较大程度地辅助电力自动化系统进行远程操作时的现场环境确认,同时也是多系统智能联动的重要应用。
4 案例分析
四川省广安某煤矿通过应用基于巡检机器人的变电站全方位管控系统,能够对变电站各配电柜进行全方位、无死角的监控和管理。在远程操作供电系统期间,利用巡检机器人对目标配电柜的运行情况、周边环境和视频图像等内容进行全方位监控,增强快速反应和应急处理能力,提高供电安全水平。相较于传统的人工巡检方式,机器人全方位管控巡检方式的优势如表1所示。

表1 巡检模式对比表
5 结束语
本文研究了煤矿变电所智能防越级跳闸和接地选线技术,解决短路、漏电、失压、干扰、拒动和误动等原因造成的越级跳闸大面积停电,消除威胁煤矿供电安全的重大灾害事故。采集供电线路的零序电压、零序电流和零序功率等故障参数,通过横向选线纵向选点确定故障线路并切除故障,提升供电系统整体供电安全。本文研究了供电系统故障诊断技术,基于供电设备运行数据以及巡检机器人感知数据,建立煤矿供电设备故障诊断模型,实现供电系统故障预判,强化煤矿设备维护管理,减少机电设备故障对煤矿安全和生产的影响,起到了减员增效的目标。