基于人工智能的电力调度实时发电干扰稳定控制方法
2022-11-08贺鸿鹏马成龙张伟纪巍
贺鸿鹏, 马成龙, 张伟, 纪巍
(国网内蒙古东部电力有限公司,内蒙古 呼和浩特 010010)
0 引 言
随着用电规模的扩大,为了保证用电的稳定性和安全性,结合国内外的控制技术,研究了大量的电力调度实时发电控制方法。文献[1]提出,利用随机模型预测电力指数,实现对调度的控制工作。该方法结合发电波动性和不确定性的特点,通过随机模型分析负荷响应曲线,根据分析结果设置全局最优控制策略,实现对电力调度的精准控制。文献[2]则提出,设计一个实时调度模型,根据不同发电站的供电特性,构建反映运行工况的约束模型,结合调度系统的运行逻辑,通过调节供电速率实现对实时发电的控制[3-4]。
本文以现有的控制方法为前提,将人工智能技术融合到控制方法当中。将该技术与控制方法融合使用,为电力调度实时发电抗干扰提供更加可靠的技术支持。
1 基于人工智能的电力调度实时发电干扰稳定 控制方法
1.1 设计自适应广域阻尼控制器
以提取的干扰稳定特征行为作为研究前提,设计自适应广域阻尼控制器,利用该控制器进一步分析通信时延问题,为稳定控制提供技术支持[5-6]。针对控制系统的低频振荡问题,构建一个自回归滑动平均模型,也就是ARMA模型,该模型的计算方程为:
A(d-1)p(t)=d-kB(d-1)q(t)+C(d-1)I(t)
(1)
式中:k为通信时延;A(d-1)、B(d-1)、C(d-1)分别为后移因子d-1控制下的多项式;p(t)为电力调度发电输出;q(t)为电力调度发电输入;I(t)为白噪声[7]。利用递归最小二乘法改进上述模型的表达方式,得到:
p(t)=βT(t)Ψ(t)+I(t)
(2)
式中:βT(t)为参数向量转置矩阵;Ψ(t)为控制量测量向量。利用上述模型实现阻尼控制器的数据识别。在数据识别的基础上,设置惯性时间常数,此次设计要求该值的取值为0.02 s,设置识别功率指令为H1,实际输出功率为H2,H′为功率输出上限,H″为功率输出下限,则生成一个识别模式。根据该模式设计的自适应广域阻尼控制器基本结构如图1所示。
设计的控制器结合ARMA模型,在线识别电力调度数据,利用识别参数(c1,c2)捕捉振荡抑制目标,当偏移因子确定后,输出最优控制信号,结合额外输入在时延环节作用于控制系统,根据输出功率约束控制行为,实现对电力调度实时发电的控制[8]。
1.2 人工智能技术控制电力调度实时发电
将人工智能技术应用到设计的控制器当中,用于直接控制电力调度实时发电。设计的控制器具备了干扰稳定参数识别功能,添加的人工智能技术,通过预测负荷加强控制器的控制效果。根据文献[9]研究的基于人工智能技术的预测方法,发现由于人工智能技术使用的网络架构过于复杂,需要注意数据欠拟合的问题。根据该条思路构建一个约束模型,公式为:
f(t0+Δt)=f(t0)+μΔt
(3)
式中:μ为电力负荷爬坡速率;t0为稳定周期;Δt为扰动周期。人工智能技术以该模型的约束为前提,控制电力调度发电的输出功率爬坡速度,按照下列公式的计算结果,设置爬坡速度预期指标。
(4)
式中:m为常数,本文研究中该值取值为5;Y1、Y2分别为某一时间段第i分钟时和该时段的超短期负荷预测值;Δβ1、Δβ2、Δβ3分别为负荷变化平均值、当前时段每分钟之内的功率变化值、计划的每分钟输出功率变化值。根据上述求得的计算结果,利用下列公式完成人工智能技术,在广域阻尼控制器当中的应用,实现对电力调度实时发电的自适应控制,公式为:
ζ=Δβ·R
(5)
式中:ζ为自适应偏置值调整结果;R为调整系数[10]。图2为人工智能技术下结合预期指标生成的可视化监控曲线。

图2 可视化监控曲线
当曲线L1和L2高度接近时,说明人工智能技术有效预测了爬坡速度指标,根据该预测结果,控制电力调度实时发电扰稳定指数,利用人工智能技术的融合使用实现电力调度实时发电干扰稳定控制方法。
2 应用测试
方法设计完毕后进行对比测试试验,将全新的干扰稳定控制方法作为试验组测试对象,将两组传统扰稳定控制方法作为对照组测试对象,通过比较不同方法的应用效果,分析控制能力。
2.1 试验准备
选择S市的K电力公司获取电力调度发电数据,图3是从K电力公司的数据库中,提取整理后获得不同季节的电力调度发电标准日负荷曲线。
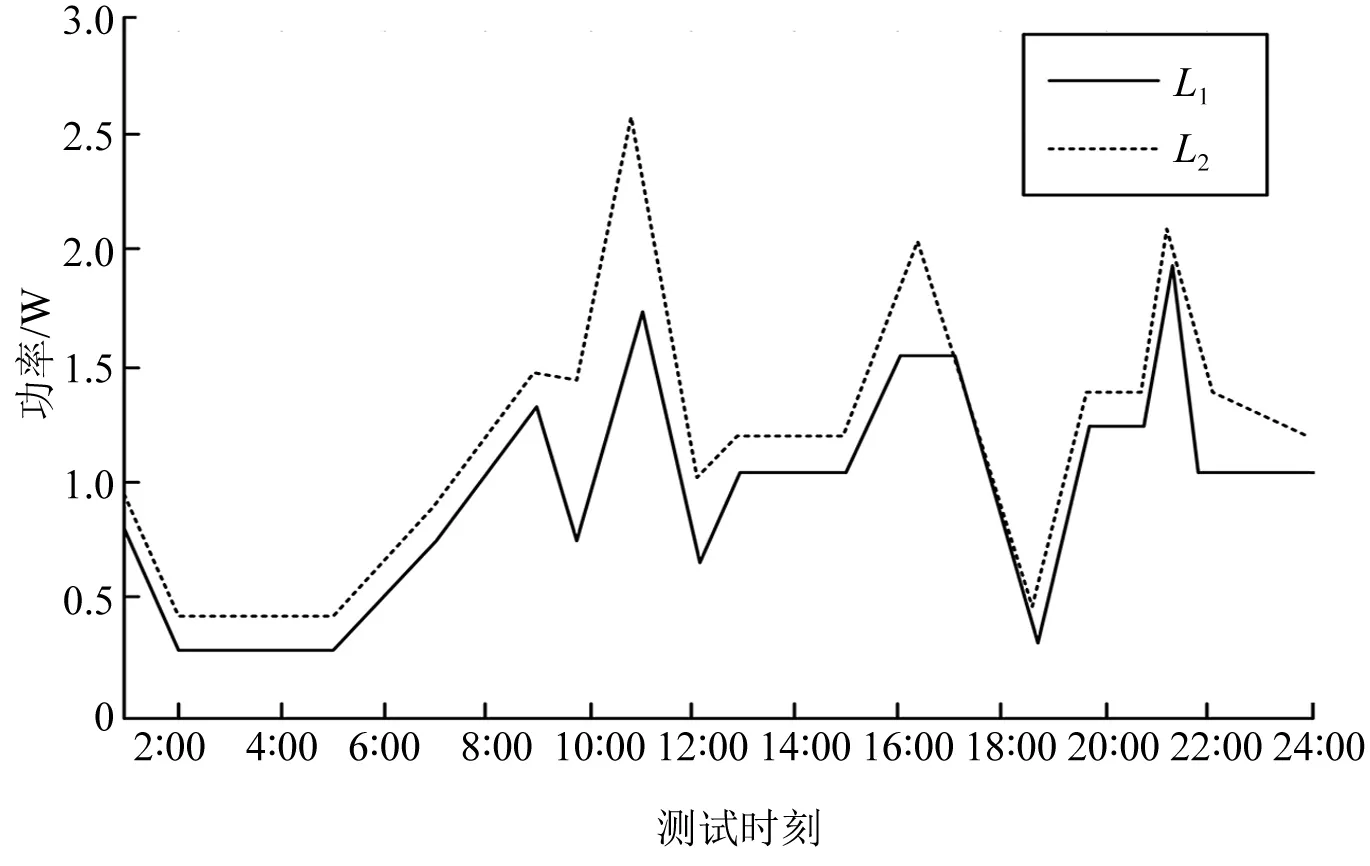
图3 标准日负荷曲线
将三组控制方法分别应用到同样的控制系统当中,根据图3进行干扰稳定控制工作,表1所示的数据,是电力调度发电过程中,机电参数的实际变化取值。
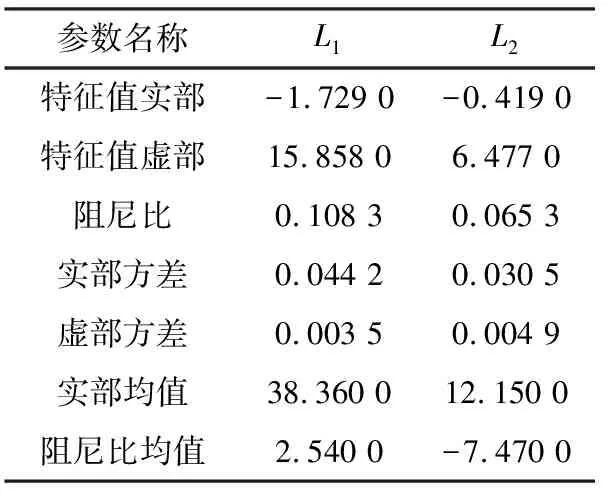
表1 控制前的机电参数
根据表1显示的数据可知,两种不同季节下的电力调度发电,影响稳定性指标。分别利用三组方法对两组条件进行控制,表2、表3为不同条件下的控制效果。
根据表2与表3显示的结果可知,在计算相应的参数值时,三组方法获得的实部、虚部以及阻尼比相关系数,与表1中的参数均高度近似,因此得到的实部稳定概率以及阻尼比稳定概率超过了0.99,证明了设计的新控制方法与传统控制方法,均有扰稳定控制能力,可以应用到实际工作当中。

表2 不同方法对L1机电参数的控制效果

表3 不同方法对L2机电参数的控制效果
2.2 不同频率下的发电干扰稳定控制效果
将三组方法分别应用到K电力公司区域A、区域B的电力调度发电工作当中。正常发电频率下的控制效果如4图所示;异常发电频率下的控制效果如图5所示。
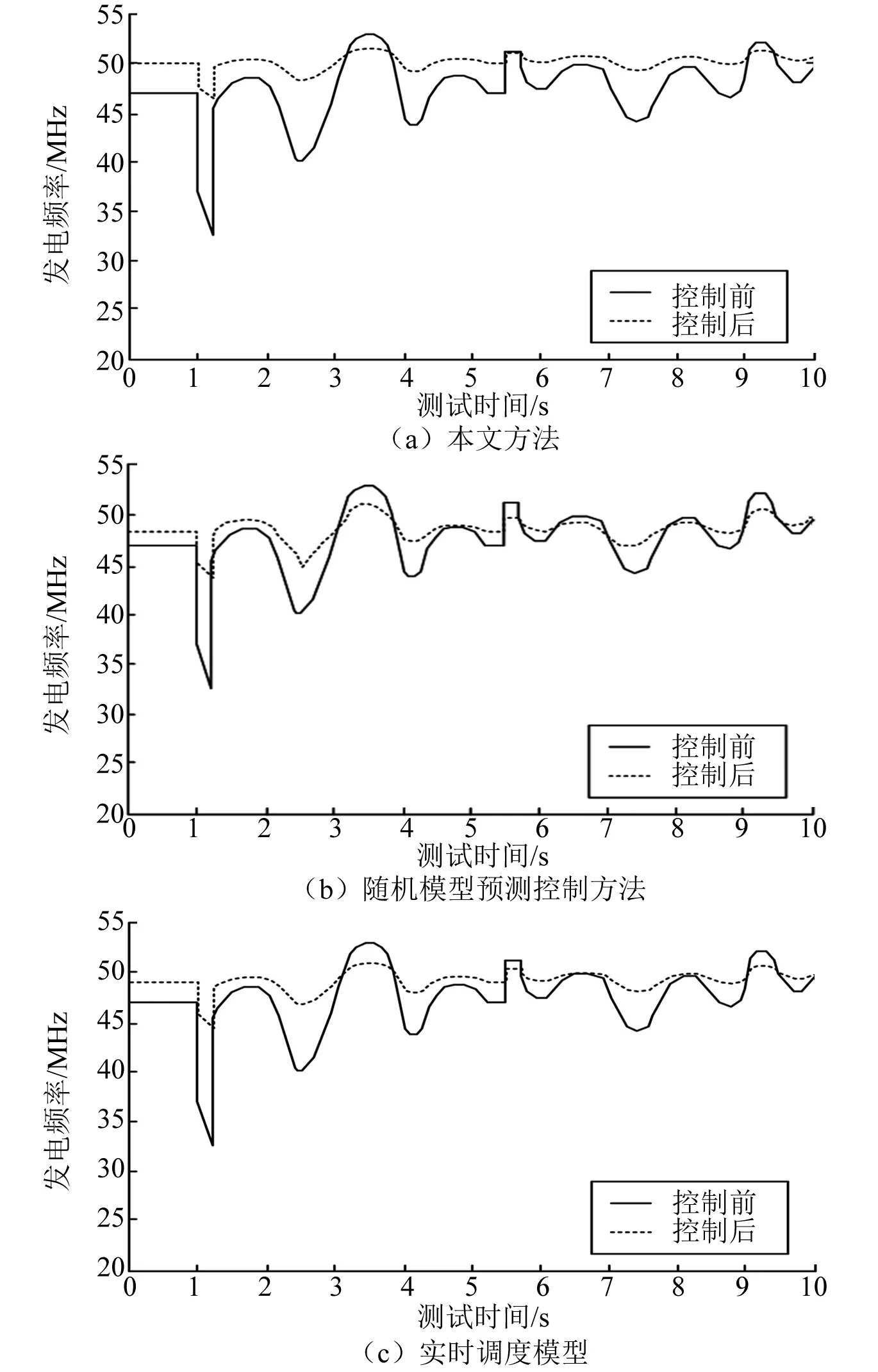
图4 正常发电频率下的控制效果

图5 异常发电频率下的控制效果
已知K公司按照国家规定的50 MHz控制发电频率。根据图4与图5可知:当电力调度实时发电频率正常时,三组方法均有较好的扰稳定控制效果;当扰稳定幅度较大、发电频率异常时,本文研究的控制方法还能将发电频率控制在50 MHz,但此时的两组传统方法,难以将发电频率控制在安全值附近,验证了此次研究的控制方法能取得更好的应用效果。
3 结束语
本文研究的控制方法以传统方法为基础,利用全新控制器进一步强化方法的控制性能,同时在人工智能技术的辅助下,将控制器的功能发挥到最大,保证不同环境中均有良好的控制效果。但该方法的计算步骤较多,因此效率可能会低于传统方法,今后需要简化或优化部分计算,提高该方法的工作效率,为电力调度工作稳定和安全,提供科学严谨的技术支持。