六自由度欠驱动AUV系统建模技术研究
2022-11-05杜吉庆
杜吉庆 周 丹
(1.苏州中寰园林设计有限公司 江苏苏州 215000; 2.扬州市兴创环境科技有限公司 江苏扬州 225000)
0 引言
当前随着海洋的开发越来越深入,AUV(Autonomous Underwater Vehicle)的应用越来越广泛[1],例如海洋资源探测、军事应用、救灾救援、地图绘制等,各种应用的要求也随之提高,而精确的AUV系统运动模型是实现各种应用的前提。
AUV系统的非线性和工作环境未知性使得建模困难,为了快速获得AUV系统的控制模型,参数辨识、模型简化和数值建模是建模研究的热点,AUV系统的高非线性和不确定性,称为未建模动力学[2]。计算流体动力学(CFD)被用来对形状不规则系统的模型进行详细分析,Timothy在建模水动力方面做出很大贡献[3,4]。本文在上述文献基础上,描述建模细节,并对参数意义进行说明,所建立模型可以直接根据结构参数进行修改并编程应用。
1 AUV系统运动学模型
以美国Hydroid所研制的一种欠驱动鱼雷型AUV系统为对象进行建模[3],如图1所示,AUV系统的建模包括运动学模型和动力学模型两个部分,其中运动学模型对物体运动过程中的位置、速度和加速度之间的关系进行描述,而动力学模型则是用来描述加速过程中的动力变化。
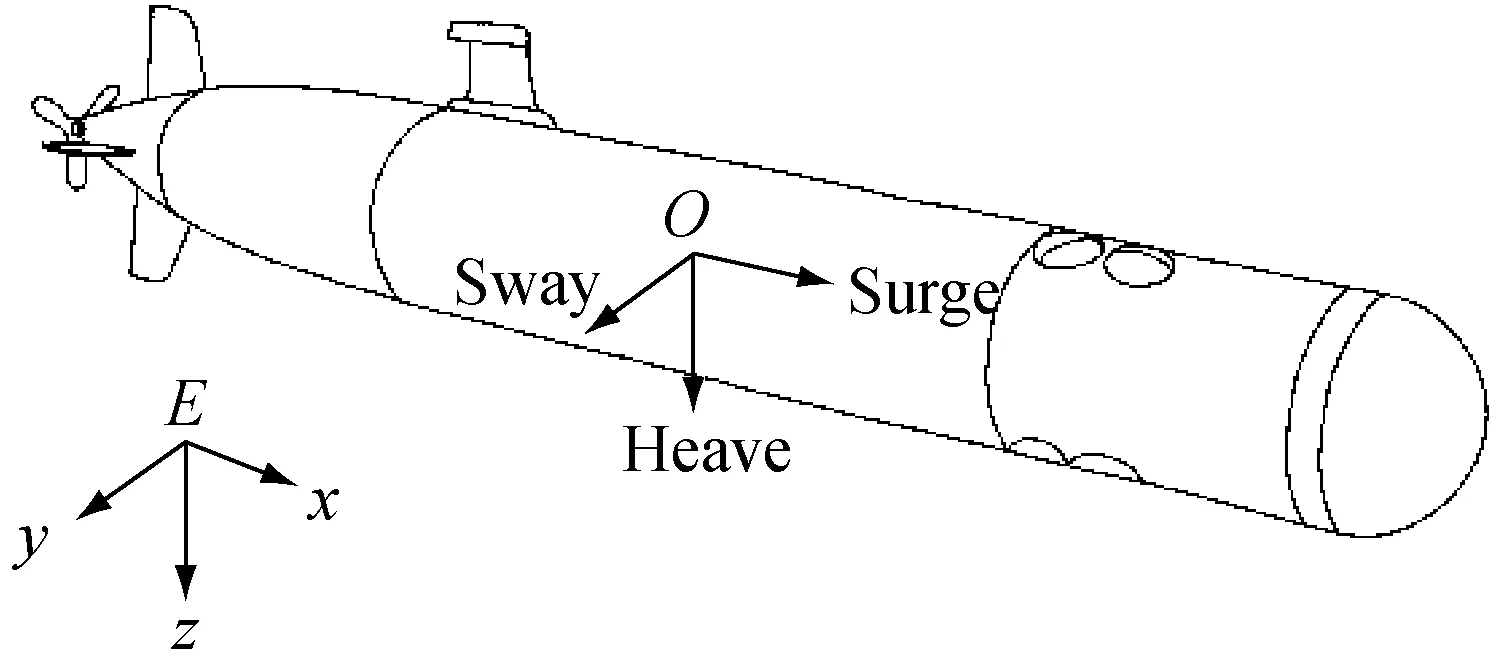
图1 AUV系统结构示意图
本文的AUV数学模型源于Fossen的海洋航行器[4],相关模型的定义则可以参考SNAME(society of naval architects and marine engineers,1950)[5],此规范定义了两套坐标系,分别是体坐标系和大地坐标系,各种定义和符号如表1所示。
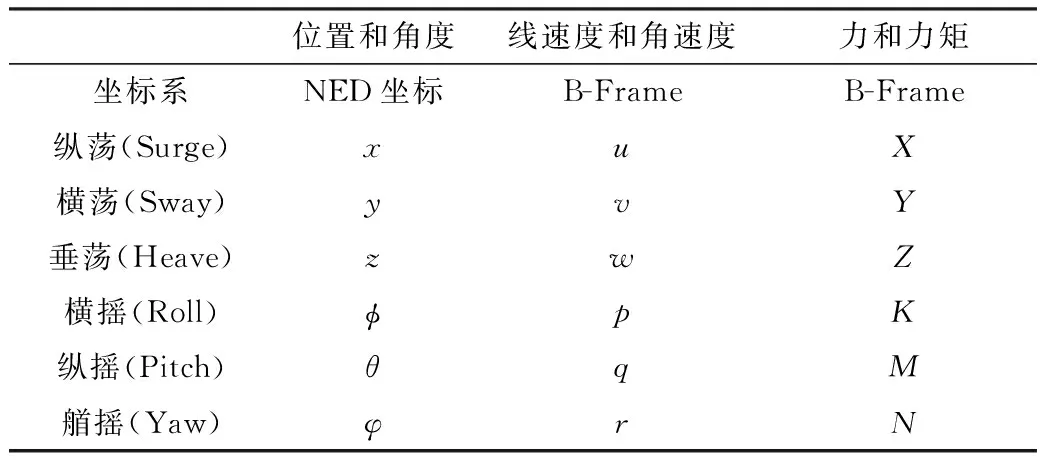
表1 SNAME坐标定义
运动学模型主要解释AUV系统运动变量的几何关系,不考虑引起系统运动及变化的力和力矩。体坐标系和大地坐标系变量之间可以进行相应的转换。
AUV系统的参数包括位置向量η、速度向量ν和推力向量τ,各个变量的定义分别如下所示:
η=[x,y,z,φ,θ,ψ]T
(1)
v=[u,v,w,p,q,r]T
(2)
τ=[X,Y,Z,K,M,N]T
(3)
其中位置向量η对应大地坐标系,原点的绝对位置(x,y,z)和转角姿态(φ,θ,Ψ)[6]。体坐标系是定义在AUV的浮心上的坐标系,速度向量ν表示AUV沿着体坐标系的三个轴的线速度(u,v,w)和三个绕轴的角速度(p,q,r)。而推力向量τ(X,Y,Z,K,M,N)表示AUV系统所受的外部推力和力矩在体坐标系下的矢量表示。将上述两个坐标系下的变量进行坐标变化,变换矩阵J(η)∈R6*6,J(η)是转换矩阵,且是可逆矩阵。
(4)
(5)
其中欧拉角η=[φ,θ,ψ]T分别是AUV系统的横摇、纵摇、艏摇角度,R(η)是线速度转换矩阵,是体坐标系到大地坐标系的转换矩阵,T(η)是角速度转换矩阵,是体坐标系到大地坐标系的转换矩阵,同理,如果是从地面坐标系到体坐标系转换[6],采用逆矩阵的形式。其中R(η)和T(η)分别定义如下,

(6)
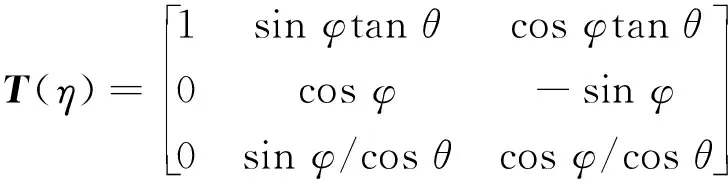
(7)
当θ=±90° 时,T(η)是不存在的,因此,AUV系统的角度存在一定的范围,横滚角φ:-π<φ≤π;纵倾角θ:-π/2<θ<π/2。
实际系统在应用过程中,为了设备安全,姿态角具有一定的约束条件。本系统约束条件为:横滚角φ:-π/4<φ<π/4 ;纵倾角θ:-π/4<θ<π/4。
2 AUV系统动力学模型
AUV系统的动力学部分可以根据线性定理进行叠加,AUV系统的水动力和航行动力包括刚体运动分析和水动力分析两部分,两者可以叠加。动力方程包括动量和动量矩方程,动量方程也就是线性动量,与直线运动有关系,p=mv,而动量矩方程式用角动量表示,与旋转有关系,L=mv×r。
2.1 AUV系统刚体运动分析
理想情况下,AUV系统可以视作无水环境中的理想刚体。刚体运动包括平移运动和旋转运动,不考虑水动力,刚体运动紧凑表达式为:
(8)
其中各个变量的定义如下:
MRB:AUV的刚体质量和转动惯量生成的矩阵;
CRB:科里奥利(Coriolis)力和力矩的矩阵;
τenv:外部环境作用力和力矩,包括风、浪、洋流等;
τpro:推进器的力和力矩。
2.1.1 惯性矩阵MRB

(9)
本系统为对称的AUV系统,质量矩阵分布在矩阵的对角线上[8]。所以式(9)中M11是mI3×3。此时MRB可以写为如下形式:
(10)
惯性矩阵MRB的右下角I0是AUV相对于体坐标系(B-frame)原点的转动惯量矩阵,惯性张量矩阵(Inertia tensor vector)是对称正定矩阵,I0的所有元素是AUV围绕轴旋转的转动惯量。质心的转动惯量:
(11)
此时标准MRB公式如下:
MRB=
(12)
斜对称矩阵S(λ)=-sT(λ) :
(13)
λ=[λ1,λ2,λ3]T
(14)
细节计算:

其中Ix、Iy、Iz都是相当于X0/Y0/Z0轴的转动惯量。当体坐标系的主轴{Xb,Yb,Zb}和惯性坐标主轴重合时,此时,可以将I0简写为Ig:
Ig=diag {Ix,Iy,Iz}
(15)
(16)
2.1.2 科里奥利力CRB(v)
CRB(v)是科里奥利力的斜对称矩阵。且与MRB和速度v有关,MSS(marine system simulation)[6]提供了计算方法。
定义如下所示:
CRB(v)=
(17)
CRB(v)=
(18)
上述公式展开为如下形式:

(19)
对于速度比较小的系统,可近似认为CRB(v)=0。从上式可见,当各个速度都是0,总体为0。
2.2 AUV系统水动力分析
AUV的水动力主要包括附加质量力、阻尼力和回复力,AUV水动力作用效果可以按照线性叠加在刚体运动基础上[9],由Fossen的模型[1],水动力作用表达式为τhydro:
(20)
其中:
MA:附加质量矩阵;
CA:科里奥利力和力矩的附加质量部分矩阵;
D:阻尼矩阵;
g(η):回复力矩阵;
下面分别对上述各种水动力组成部分进行说明和分析。


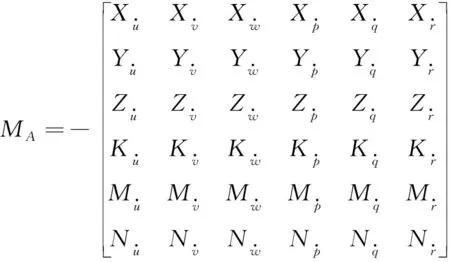
(21)
式(21)MA中各变量为水动力参数,与AUV系统的形状参数L相关,尤其是MA的对角线的参数与L3成正比,其他参数与L4成正比,且与水的密度ρ成正比。
附加质量力可以简写为如下形式:
(22)
理想情况下,MA是正定矩阵,且对角线元素大部分情况下是正数,极少情况下是负数[10]。实际情况下,AUV系统低速运行时,非对角线的元素小于对角线上元素,特别是对于水下具有对称性的AUV系统,非对角元素基本可以忽略不计,式(22)可以简化为对角矩阵:
(23)
细节计算:
附加质量力计算过程参数:
(24)
(25)
(26)
2.2.2 附加质量引起的科氏力CA(ν)ν
附加质量引起的科氏力CA(υ)υ与MA和速度υ有关。
(27)
实际科氏力写成速度ν和MA的形式:
CA(v)=
(28)
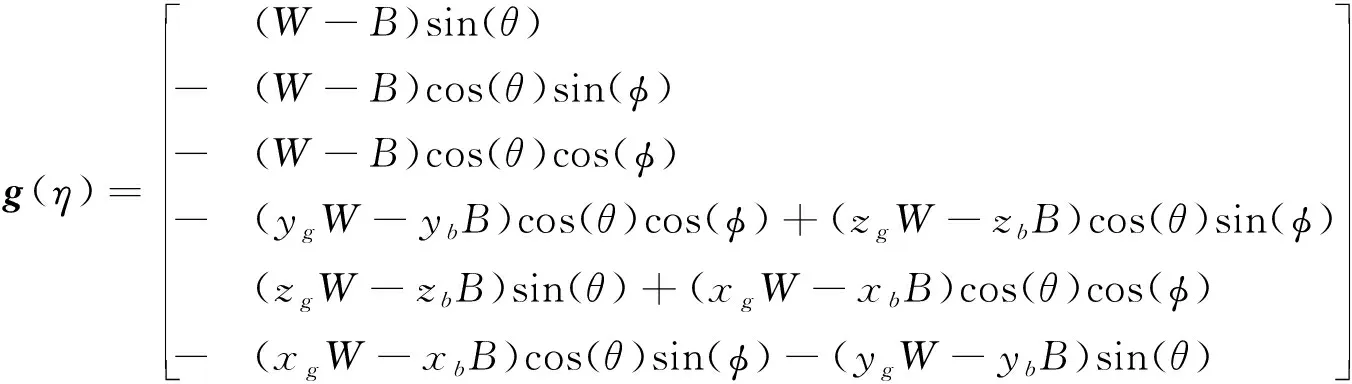
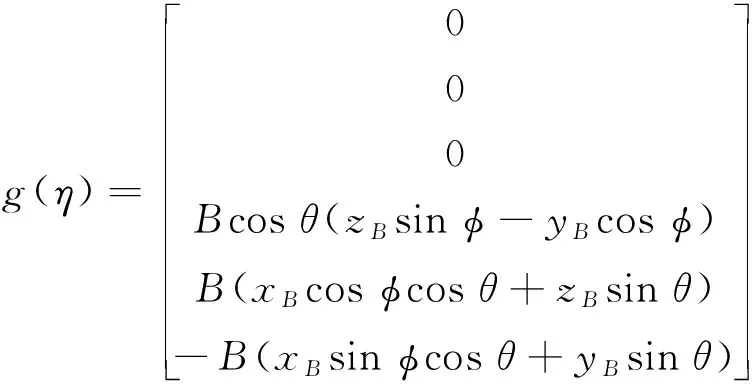
2.2.3 回复力g(η)
AUV系统在垂直面上受到作用于重心的垂直向下的重力W和作用于浮心的垂直向上的浮力B,水面航行器平衡条件是W=B,且作用于同一条铅垂线。对于水下AUV系统而言,通常被设计成接近零浮力的临界状态,即重力W略小于浮力B。回复力决定了系统的初稳性,也就是AUV系统受到外来作用力脱离平衡状态时,重力和浮力共同作用使系统恢复平衡的能力,浮心高于重心可以产生恢复平衡的扭矩。
W=mg
(29)
B=ρg∇
(30)
AUV系统在零浮力状态时,回复力可以用如下公式表示:
(31)

(32)
当选择运动坐标系的原点定义在重心时,rg=03×1,且当W=B时:
(33)
如果运动坐标系的原点定义在重心时,rg=03×1,但是W≠B。
2.2.4 流体阻尼力D(|v|)
阻尼力按照构成的性质可以被分为4种:
1)势流阻尼:DP(potential damping), 由辐射引起的阻尼, 基本可以忽略不计。
2)表面摩擦阻尼:DS(skin friction)。
3)兴波阻尼:DW (wave drift damping),AUV系统在波浪作用下的阻尼,对AUV系统产生阻力作用。 由于AUV系统大部分时间工作在水下,因此,此部分可以忽略不计。
4)旋涡脱落阻尼:DM(vortex shedding damping),是AUV系统在粘性流体中运行的耗散能量。
此处按照文献[6]把D(|v|)划分为表面阻力的线性阻尼D和波浪等非线性二次阻尼Dn(|v|)两个部分。
D(|v|)=D+Dn(|v|)
(34)
文献[1]所假设的AUV系统具有良好的对称性,因此
D(|v|)=-diag{Xu,Yv,Zw,Kp,Mq,Nr}-
diag{Xu|u||u|,Yv|v||v|,Zw|w||w|,Kp|p||p|,
Mq|q||q|,Nr|r||r|}
(35)
2.3 环境干扰
τenv∈R6×1,表示外部环境对AUV系统的力和力矩的干扰,干扰的形式和作用较复杂,一般在水下AUV系统的应用中,将各种干扰假定为线性可加的,因此风、浪、流都可以分开讨论加以叠加。
对于本系统中,风、浪、流不作为水动力模型的一部分,仅作为干扰等不确定因素在各种控制器设计中进行考虑,特别是对于水面USV和浅水应用的UUV,风、浪的影响非常大。实际应用中,考虑外部干扰波浪流动速度,则动力学模型为:
(36)
其中,vr是AUV系统相对于流体的速度,vr=ν-vc,其中vc是波浪速度,假设:
2)vc相对于AUV系统的速度ν为较小数值,近似有CA(ν)ν=CA(vr)vr;
此时,动力学模型为:
Mvr+C(vr)vr+D(vr)vr+g(η)=τenv+τ
(37)
在常规情况下,流体仅有线速度,没有旋转角速度,因此,流体速度为
(38)
2.4 AUV系统推进器建模
AUV系统的推力力矩τpro,由文献[1]可知,推进器的推力是航行器的速度向量ν和控制输入向量u的非线性函数,其中ν是相对于海浪的速度,u是控制输入力矩。
τpro=B(ν)u
(39)
细节计算:B的计算。
τpro=ρD4KT(J0)|u|u(J0)
(40)
J0=Va/(uD)
(41)
(42)
T(u,Va)=T|u|u|u|u+T|u|Va|u|Va
(43)
Q(u,Va)=Q|u|u|u|u+Q|u|Va|u|Va
(44)
τpro=Bu
(45)
其中D是叶桨直径,KT是推进系数,可以由系统桨叶数据推导出。
3 六自由度系统模型
AUV系统在环境中做6DOF的运动,式(46)可以用来描述系统的动力学特性

(46)
其中:
M=MRB+MA
C(v)=CRB(v)+CA(v)
D(v)=D+Dv(v)
根据式(27),AUV系统的速度较低,忽略科氏力和向心力的作用,且AUV系统运动方式主要有前进、后退、上浮、下潜和转艏,因此,可以将其视为简单的单自由度运动[9],各运动自由度耦合较小,且互不干扰。
4 AUV系统模型的仿真分析
对所建立的AUV系统模型进行仿真分析如图2所示,由于系统模型处于临界平衡状态,因此Z轴存在一定的不平衡力矩,在开环状态下,AUV系统的坐标Z轴存在一定速度,使系统Z轴的坐标发生改变。
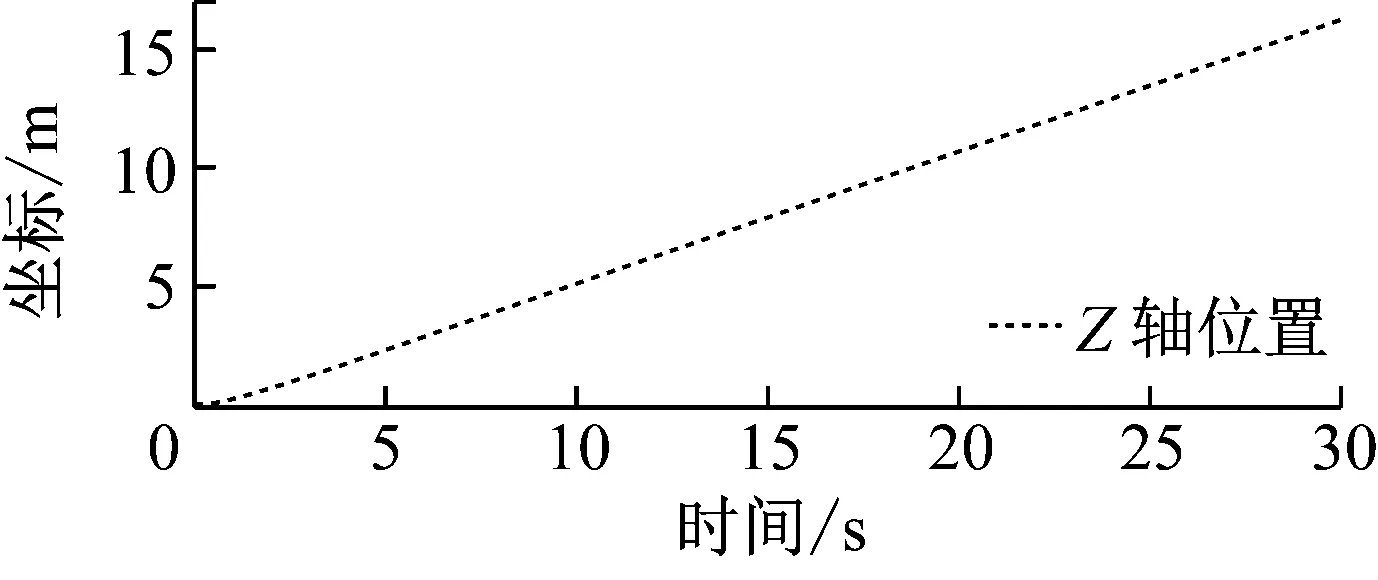
(a)

(b)
AUV系统在实际应用中,一般会保持一个稳定的航向速度,因此速度控制是基本控制,此处采用PID控制器进行闭环控制速度,surge的速度控制效果如图3所示,可见,速度控制具有超调,且在5 s时间范围内达到稳态,当速度发生变化时,系统仍然会有超调,且会达到稳定状态。
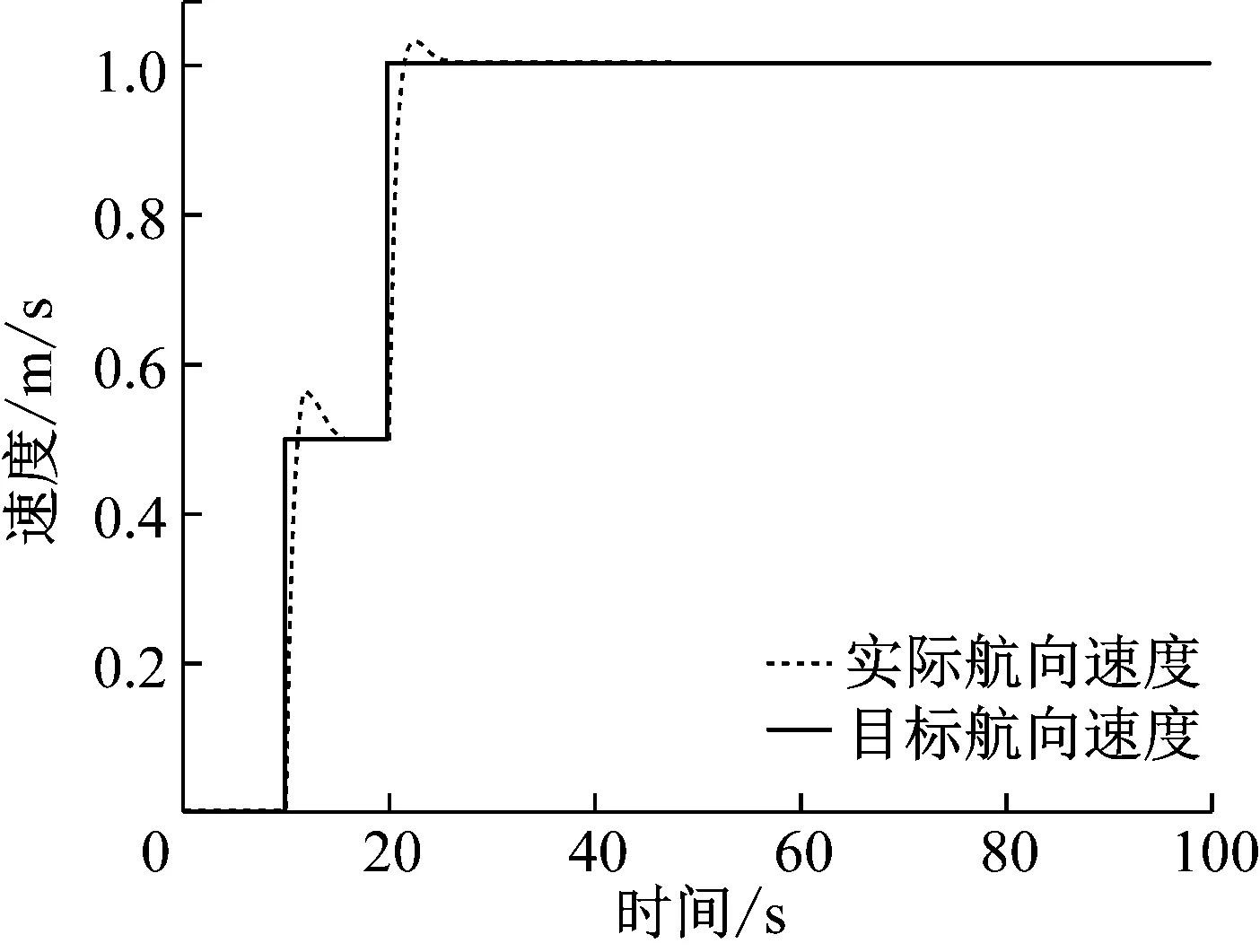
图3 航向角度动态响应
AUV系统在水下运行时,需要有固定的航向目标,或者航向目标发生变化时,可以进行调整,因此,对AUV系统进行航向角度控制,航向角度仿真如图4所示,在t=30时,目标值设定为5 deg,AUV系统可以快速跟踪上目标角度,虽然存在一定超调和系统运行过程中存在波动,但是超调和波动都在可以接受范围之内。
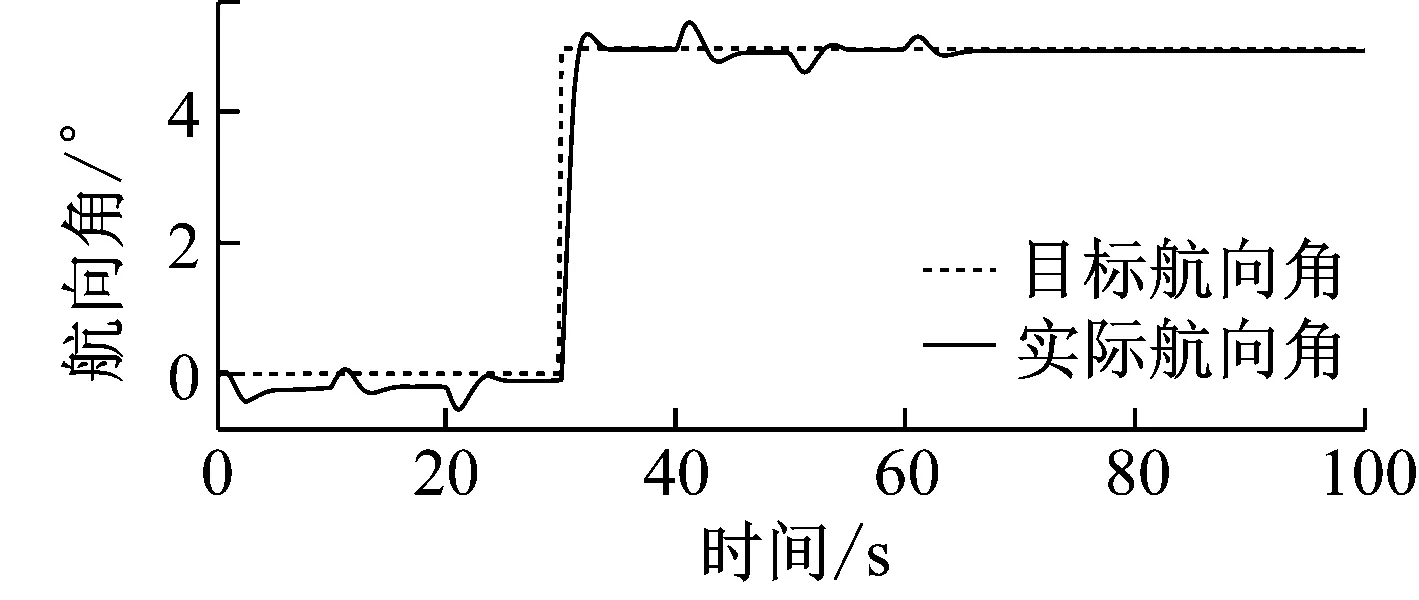
(a)
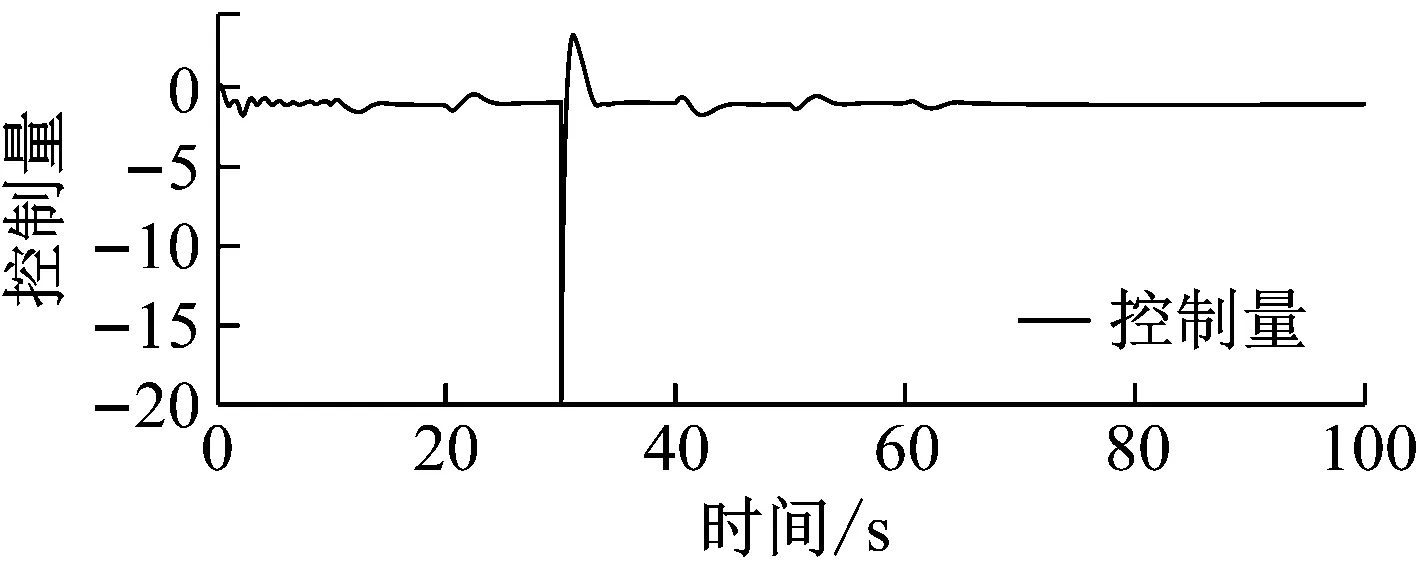
(b)
5 结束语
实验结果表明,本文所建立的AUV 系统模型,既考虑运动学参数,也考虑动力学参数,且对各种参数进行细化,适用于程序的过程设计;根据开环动态测试可见,系统运行结果符合Z轴存在不平衡力矩的结论;根据动态航向速度和航向角度仿真分析可见,系统模型响应速度满足实际设计要求,因此系统模型设计可以用于测试环境的设计。
