基于LabVIEW 的火车轮面裂纹深度在线监测技术
2022-11-05夏蓉花刘春赵慧娟
夏蓉花,刘春,赵慧娟
(江苏安全技术职业学院,江苏徐州 221011)
随着我国高铁事业和高速列车建设的快速发展,作为铁道系统的重要组成部分,火车车轮的状态直接关系到火车行车安全。车轮踏面损伤是车轮故障的主要类型,所以对车轮踏面损伤进行自动检测具有重要意义。
该文针对火车车轮工作时高温、高速的特点,开发了一套车轮踏面的深度检测系统,为车轮的健康检测提供了一种有效手段。
1 电磁超声探伤系统设计
该文设计的电磁超声探伤系统如图1 所示[3]。
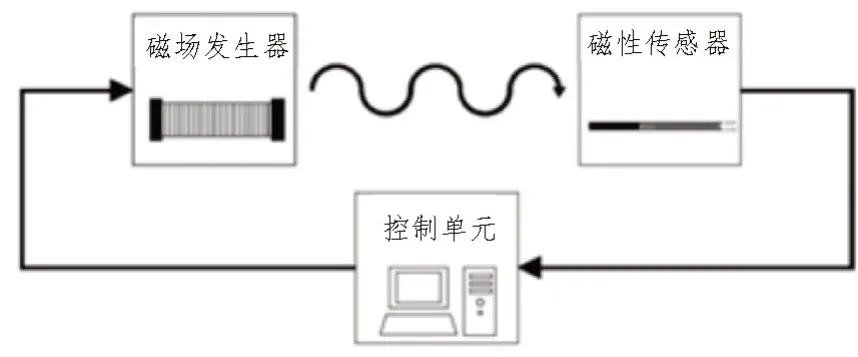
图1 电磁超声探伤系统
文中提出的电磁超声探伤系统基于频分复用技术开发,不同线圈由不同的频率正弦信号供电,每个磁场可感应出具有不同频率和幅度的正弦电。为了获得每个信号分量,将输出通过带通滤波器进行滤波[4]。
1.1 磁场发生器设计
考虑到磁场的限制,重新设计了一种新的场发生器,以满足在适当距离提供符合要求的磁场[5]。
5 个线圈通过使用塑料支架固定在专用的有机玻璃框架上,以避免出现可能产生电磁干扰的次级磁场。在排列线圈时,前3 个线圈分别沿着直角坐标系x-y-z分布,另外两个相对于支撑平面倾斜45°,实物如图2 所示。通过这种方式可以扩大跟踪体积,同时确保互感为零。
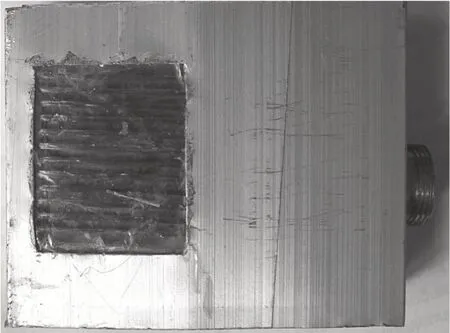
图2 磁场发生器实物
每个单线圈的设计均依照IEEE C95.6 标准,满足在受控环境中人体四肢、躯干和头部暴露于磁场的安全限制。此外,该系统还设计了0.2 mT 的安全阈值[6]。
磁场发生器线圈的交流电源信号由DAQ 模块组成,型号为NI9263。由于功率有限,因此需要为每个线圈使用功率放大器。具体实现方法是将Texas Instrument OPA544 运算放大器配置在非反相状态[7],并将增益设置为51 dB。
1.2 电流控制单元
初步实验结果表明,线圈电阻的过热导致了显著的磁场变化,因此需要实现电流控制回路以保持磁场的恒定[8]。
如图3 所示,该文对于每个磁场发生器线圈实施比例积分(PI)控制,并通过引入积分控制来减少渐进误差。因为该系统在稳定条件下工作,所以微分控制可以被忽略,对超调没有严格要求,且动态扰动较慢(例如温度变化)。
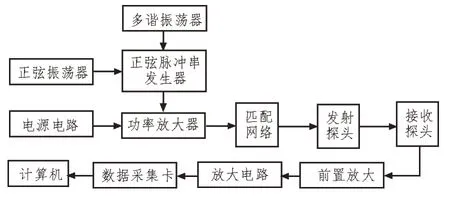
图3 电流控制模块
此次采用的电流测量元件为LA55-P 型闭环霍尔效应传感器,其具有70 A 的峰值电流和0.65%的控制准确度[9]。通过将一个高精度的100 Ω电阻连接到传感器的输出端,将传感器输出端的电流转换为电压信号,便于控制单元获取测量信号[10]。
采集电路采用±12 V 双电源供电,另外两个0.01 μF 旁路电容器用于减少电源信号可能的干扰,如图4 所示。为了放大电流信号,在LEM 传感器中进行两级放大,获得的电压值评估如下:

图4 电流信号采集电路

其中,Nt=1 000 匝,是电流传感器的匝数。
图5 为电流控制电路板实物。为了获取PI 控制的常数,实验测得比例常数与积分常数值为0.024 和0.005。经过实验测试证明了电流信号的良好稳定性,仅有约0.01%的控制误差。
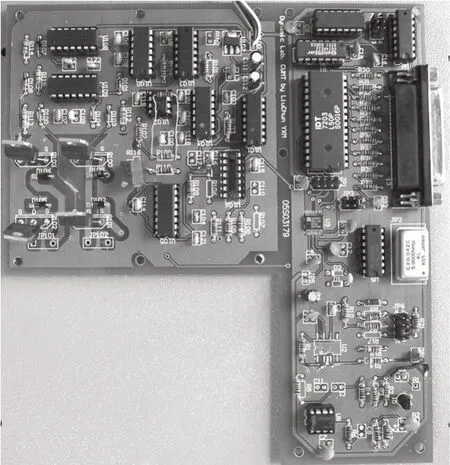
图5 控制电路板实物
为了有效管理和控制该文设计的系统,需要一个控制单元来为场发生器生成5 个正弦信号并从测量电路中获取实时电压。文中设计开发了基于DAQ(数据采集)模块和软件接口的实验装置,并在LabVIEW 中集成。
2 基于LabVIEW的深度监测网络
为了对LabVIEW中输入的信号进行合理分析,基于深度学习设计了信号分析与分类算法。LabVIEW接收信号可以表示为:

其中,y[n]是接收到的复数信号,x[n]是从所设计调制方案n传输的复数信号,η[n]是均值,记其方差为。
深度网络由多层组成,无需人工干预即可提取网络数据的特征。此次选用ResNet-50 模型提取数据特征,与浅层网络相比,深层网络提供了良好的分类结果[11]。
2.1 初始化网络
网络配置如图6 所示。网络初始模块采用传统的并行方法来连接卷积层子网络,同时批量归一化激活层[12]。该模型具有并行分支,易于在多个GPU上进行训练。高维度的初始网络使用中间辅助分类器实现,以减少反向传播时的梯度消失问题[13]。神经元激活时,使用ReLU 函数以及0.5 的删除概率实现正则化[14]。

图6 网络配置
2.2 数据预处理和训练
为了确定正确的调制方案,在分类层次结构的3个阶段训练多个深度学习模型[15]。
用平均能量对LabVIEW 数据进行归一化后,对复平面4×4 区域中的点进行进一步处理,该区域范围涵盖了合理信噪比中的大部分有用数据。采用滤波器Fk将CDM 转换为彩色图像,其中k∈{1,2,…,6}。Fk由3 个掩码组成,每个掩码均是一个维数为100×100的布尔矩阵,且每个掩码的输出均代表电信号的一个通道[16]。Fk滤波器的第m个掩码的输出由式(3)给出:

2.3 模型训练与部署
此次的预训练模型采用大小为3×100×100 的输入数据,并分类为1 000 个类别。通过在每个模型的末尾连接8 个全连接层来执行分类任务,网络前7 层分别包含1 000、750、500、250、100、50、20 个神经元,第8 层根据选择的分类器包含2 或3 个神经元。模型训练时,信噪比在-4~30 dB 间的数据步长设置为1 dB,信噪比在35~70 dB 间的数据步长设置为5 dB。在分类的第一步中,将考虑的8种调制方案分为3组,并给出17 200 组数据进行训练。第二步,用4 300 组数据训练的模型进行分类。最终分类也遵循了一致层次结构原则,分析模型在带有Keras 库的Python 中实现,文中部署在NVIDIADGX-2GPU 上来训练模型。为了更优地实现分类且更快地完成训练过程,对求解器配置的参数也进行了调整,学习率设置为0.000 1,最小批量的大小为64。
3 实验验证
此次设计考虑在计算机资源有限的情况下,使用PC-DAQ 方法实现测量数据的长时间储存,并使用显示屏作为交互工具,减少嵌入式硬件的开发难度。最终集成的实时数据采集框架,如图7 所示。
图7中,程序框架的最外围为Loop程序。程序在运行时会连续采集数据,仅在用户按下STOP 时停止工作。该文设计的屏显功能由延时函数实现,考虑到人眼的工作模式,屏显的刷新延时设置在50 ms~1 s之间。Loop程序中最后完成的一部分功能是采样与存储,对于通信端口连续读取,采集到EPP 的2 048 Byte数据,数据经过时间帧同步后存储至计算机。
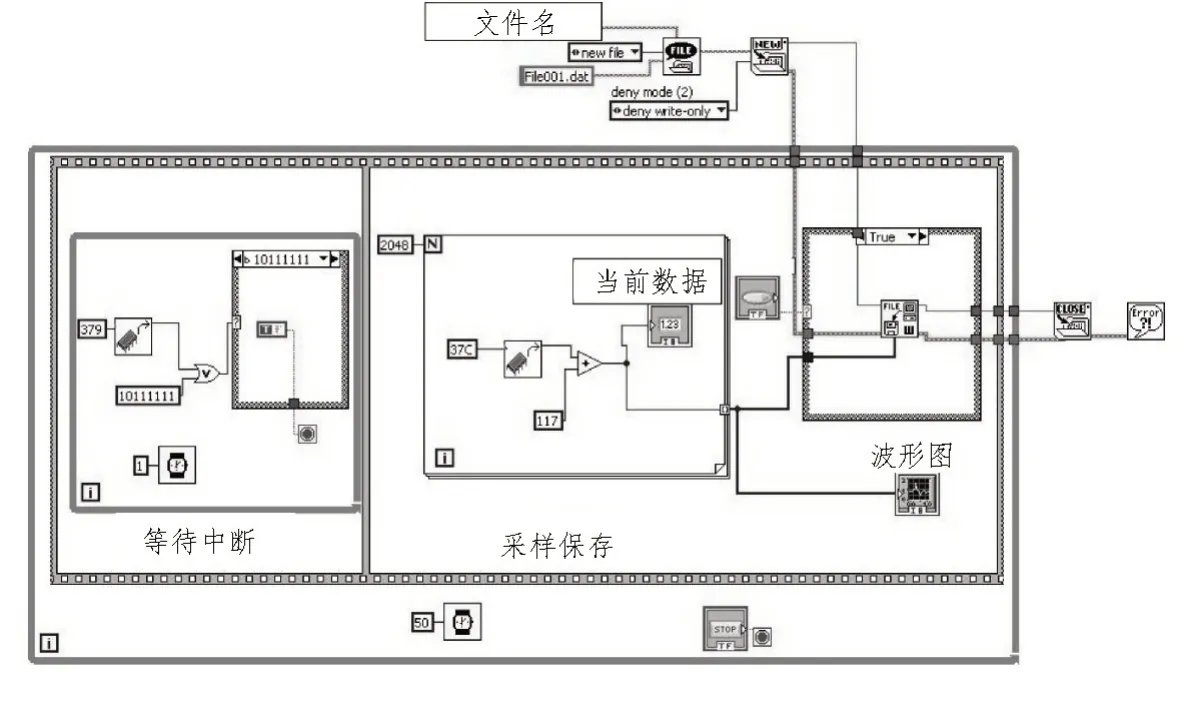
图7 LabVIEW EPP采集数据程序框架
为了评估实验所得控制电路的PI 控制常数,分别施加0.024 的比例常数和0.005 的积分常数用于Ziegler Nichols 算法。如图8 所示,获得的误差约为0.01%。实验测试结果表明,电流信号具有良好的稳定性。

图8 采样点电流波形
在此基础上,进一步对电压信号的干扰项展开深入研究,以表征系统在不同工作中的准确性和重复性。两个相互独立的干扰作用下的测量误差模型,如式(4)所示:

其中,EB(B)和ES表示相互独立的测量误差。为了验证模型,分析实验结果的标准偏差(STD),定义如下所示:

处理每个立方体内不同点处的信号样本vi(t),i=1,…,5,观察如图9 所示的误差分布情况,可以看出在一阶近似的条件下,测量误差近似于高斯分布。

图9 测量误差分布
为了研究随着测量距离的增加,系统信号处理能力的变化情况,进行了时间连续的实验测试,数据结果如表1 所示。可以看出,随着距离的增加,测量数据量也在同步增加,因此噪声项的误差也有相应的减少,所以标准偏差的平均值也有下降的趋势。

表1 电流测量标准差实验数据(单位:mA)
4 结束语
该文研究了基于虚拟仪器技术与电磁超声测量技术的火车车轮踏面裂纹深度检测技术。首先,对电磁超声探伤系统的磁场发生器、电流控制与测量单元进行研究,并使用LabVIEW 程序进行集成,实现对信号的实时显示与集成。为了减轻人工监视的负担,基于深度学习与LabVIEW 对信号数据进行特征学习以及噪声分析。通过实验验证了电流控制电路的控制精度可达0.01%以内,具有良好的稳定性。此外,随着测量距离的增加,系统对于信号处理的精度也有所提高。
火车车轮裂纹探伤的实际应用,对于检测技术的稳定性、实时性等方面有着较高的要求,这将是未来的重点研究方向。
