垂线偏差对控制网点位精度的影响分析
2022-11-03李宗春冉佳欢刘忠贺
杨 浩,李宗春,冉佳欢,刘忠贺,何 华
(信息工程大学,郑州 450001)
大地测量学中,垂线偏差定义为地面一点铅垂线方向(或重力矢量方向)与相应椭球面法线方向之间的夹角[1]。目前,对于垂线偏差的获取,除了采用传统的天文大地测量[2]以外,也可采用GNSS/水准[3]、数字天顶摄影仪[4]、卫星测高数据[5-6]、重力场模型[7-8]等方法。在大地测量中,用全站仪获取的地面常规控制网观测值是以测站大地水准面铅垂线方向为依据,而GNSS测量值是以椭球面法线方向为依据,因此在实际工程应用中经常要将以铅垂线为基准线的观测成果转换为以椭球面法线为基准线的观测成果,以便于平差计算[9-10]。由于垂线偏差的存在,在进行平差计算时难免会引入偏差,并影响控制网的精度及稳定性。
垂线偏差对观测数据的影响不可忽视,是制约三维控制网精度的主要原因之一。如何有效分析、确定和消除垂线偏差对三维控制网观测数据的影响,国内外学者对此进行了诸多研究。王文通等[11]对隧道横向贯通测量中垂线偏差的影响展开研究,并指出垂线偏差对观测角度的影响取决于测站垂线偏差的大小、观测方向的高度和方位角。Osada等[12]顾及垂线偏差的影响,提出利用精密大地水准面模型改进全站仪三维平差方法。Ding等[13]在采用局部笛卡尔坐标系建立三维控制网时,考虑到测量观测值受局部重力场的影响,在观测值归算时顾及了地球曲率的影响,并加以改正。杨洪国等[14]在进行平面控制网数据处理时,顾及垂线偏差对全站仪水平角的影响,结合重力场模型将全站仪水平角观测值改化到以法线方向为准的观测值,并与GPS数据统一处理,取得较好的数据处理结果。常晓华等[15]结合弹道飞行器质点动力学模型,系统地分析垂线偏差对弹道落点精度的影响,计算分析不同发射大地纬度、不同发射方位角下,由垂线偏差引起的弹道落点偏差的定量结果,并指出垂线偏差对弹道落点精度的影响较大,必须进行修正以改善弹道落点精度。李建章[16]在研究精密三角高程控制网平差方法时,考虑到垂线偏差的影响,对比分析了几种高铁CPⅢ精密三角高程控制网平差方法,并指出传统差分法能较好地解决垂线偏差影响,而参数法可以有效地消除球气差的影响,但其中包含的垂线偏差影响不容忽略,需要进一步研究。郭迎钢等[17]在分析工程测量平面控制网计算基准面选定方法时,基于垂线偏差的传统改正公式系统分析了垂线偏差的影响与垂直角大小的关系,并指出随着垂直角的增大垂线偏差的影响也会变大,此时必须对观测值进行严格地归算,以保证野外测量精度。朱晓等[18]以高海拔、大高差及贯通距离长等特殊环境的川藏铁路建设工程为研究背景,分析高原铁路隧道洞内旁点导线网测量精度与垂线偏差的关系,并指出在进洞联系边控制点间高差较大时顾及垂线偏差影响,可提高隧道洞内旁点导线网测量精度,从而有效减小隧道横向贯通误差。
上述文献大多基于观测值归算过程中垂线偏差的影响,或垂线偏差的传统改正公式,对垂线偏差的影响展开分析,公式推导过程繁琐,分析不全面。文中以全站仪观测值(斜距、水平角、垂直角)为研究对象,采用一种较为简单、直观的方法,分析并推导出垂线偏差对各类观测值及控制网点位偏差的影响,为工程控制网中观测成果的转换过程提供参考。
1 垂线偏差
垂线偏差定义为地面一点铅垂线方向与相应椭球面法线方向之间的夹角,反映大地坐标系与天文坐标系间的差异。如图1所示,以测站O为中心,作一辅助半球,以测站O为坐标系原点以右手系原则,分别建立大地站心地平直角坐标系O-xyz和天文站心地平直角坐标系O-x′y′z′。
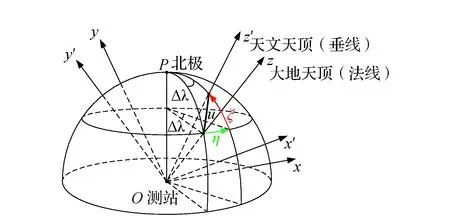
图1 垂线偏差示意图
大地站心地平直角坐标系的定义为:以测站O为坐标系原点;z轴方向为通过测站O的法线方向,以指向大地天顶方向为z轴正方向;x轴方向为与包含测站O的子午面相交方向,指向东方向为x轴正方向;y轴垂直Oxz平面,以右手系原则定义,指向北方向为y轴正方向。
天文站心地平直角坐标系的定义为:以测站O为坐标系原点;z′轴方向为通过测站O的垂线方向,以指向天文天顶向上为z′轴正方向;x′轴方向为与包含测站O的天文子午面相交方向,指向东方向为x′轴正方向;y′轴垂直Ox′z′平面,以右手系原则定义,指向天文北方向为y′轴正方向。
图1中,z和z′分别为测站O大地天顶方向(法线方向)和天文天顶方向(垂线方向),u即为垂线偏差,ξ、η分别为垂线偏差u在子午方向和卯酉方向上的分量。对于ξ和η的正负关系,若z′在z之北,则ξ的数值符号为正,若z′在z之东,则η的数值符号为正[10]。经典的天文大地测量中垂线偏差的两个分量(ξ,η)的求解式见式(1)、式(2)。
ξ=φ-B,
(1)
η=(λ-L)cosB.
(2)
式中:L,B分别为大地经度和大地纬度;λ,φ分别为天文经度和天文纬度。
2 坐标系转换
由上述大地站心地平直角坐标系和天文站心地平直角坐标系的定义可知,由于垂线偏差的存在,天文站心地平直角坐标系和大地站心地平直角坐标系是不重合的,两者的旋转关系如图2所示。
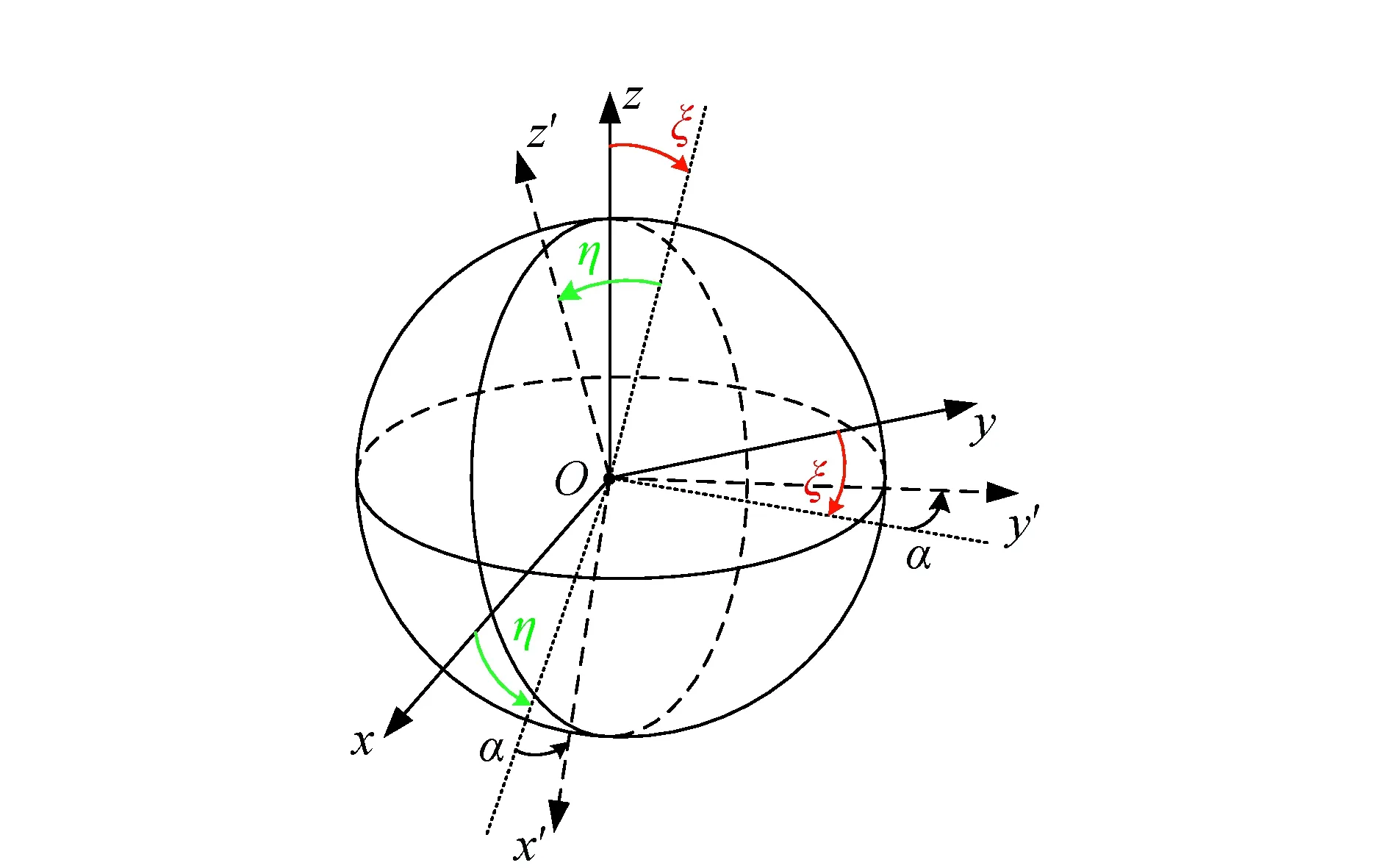
图2 大地、天文站心地平直角坐标系转换关系示意图
由图2可知,天文站心地平直角坐标系和大地站心地平直角坐标系的相互变换需要进行三次旋转:
1)保持x轴不动,Oyz按右手准则旋转角度ξ,此时旋转矩阵为Rx(-ξ),其中负号是由于其旋转方向为顺时针方向旋转;
2)保持y轴不动,Oxz按右手准则逆时针旋转角度η,此时旋转矩阵为Ry(η);
3)保持z轴不动,Oxy按右手准则逆时针旋转角度α,此时旋转矩阵为Rz(α)。
其中,第三次的旋转角α的值表示大地站心地平直角坐标系绕z轴的最终旋转,以使当地大地坐标系和天文坐标系重合,且α≈ηtanB,与ξ和η均为很小的值。因此,两坐标系的转换为:
(3)
式中:Rx(-ξ),Ry(η),Rz(α)分别为绕x轴,y轴,z轴的旋转矩阵,表达式见式(4)~式(6)。
(4)
(5)
(6)
将式(4)~式(6)代入式(3),并顾及α≈ηtanB,结果见式(7)。


(7)
对式(7)中矩阵进行处理,结果见式(8)。

(8)
局部曲线球面坐标系的建立如图3所示,在目标点M处以右手系原则建立局部曲线球面坐标系M-TvTaTr,球心为测站点O,半径为r,局部曲线球面坐标系M-TvTaTr三轴Tv,Ta和Tr分别指向v,a和r增加的方向[20]。
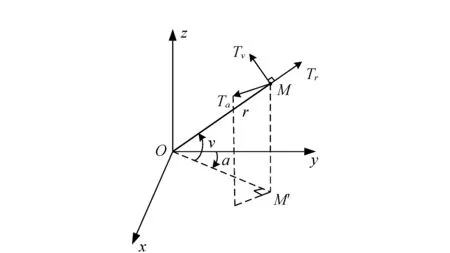
图3 大地站心地平直角坐标系与目标坐标系关系示意图
如图3所示,某一目标点M相对于测站O的大地方位角为a,垂直角为v,空间距离为r,则目标点M在大地站心地平直角坐标系下的坐标可用式(9)表示。
(9)
当只考虑大地站心地平直角坐标系(x,y,z)和局部曲线球面坐标系M-TvTaTr间的旋转关系时,可以得到两者的转换关系见式(10)。
(10)
其中
(11)
对式(10)进行微分,并结合式(9),结果见式(12)。
(12)
其中,H为度量矩阵[21],即:

(13)
结合式(9)~式(13),可以得到式(14)。
(14)
将式(14)中的矩阵相乘,在化简时只保留一次项,可以得到最终的结果,见式(15)~式(17)。
da=ηtanB+(ξsina-ηcosa)tanv,
(15)
dv=ξcosa+ηsina,
(16)
dr=0.
(17)
式(15)~式(17)即文中推导出的垂线偏差对全站仪观测值的影响公式,首先,由式(15)可知,水平方向观测值在转换过程中除了受到垂线偏差的影响,也受垂直角和纬度的影响,这主要是由于不同纬度的垂线偏差会有所变化,以及垂线偏差的求解与纬度有关,具体请参考式(1)、式(2);此外,由式(16)可知,垂直角在转换过程中主要受到垂线偏差的影响;最后,由式(17)可知,测站点和目标点间的距离在坐标系转换中不受垂线偏差的影响。
3 仿真分析
文献[19]在分析工程测量平面控制网计算基准面选定方法时,考虑到基准面对水平方向观测值影响。以经典的垂线偏差改正公式为基础,分析了垂线偏差的影响与垂直角大小的关系。经典的垂线偏差改正式如式(18)所示。
δ=-(ξcosA-ηsinA)tanα.
(18)
式中:δ为垂线偏差改正数;ξ和η为垂线偏差分量;A为测站到目标点的大地方位角;α为目标点的垂直角。
基于式(18),文献[19]采用仿真试验,分析了在垂线偏差较小(取ξ=5″,η=-3″),且垂直角v=1°时,垂线偏差改正数与垂直角的关系。试验结果表明,在垂直角较小时,由垂线偏差引起的改正较小,可以不顾及此项改正;但是,随着垂直角的增大,垂线偏差的影响也在变大。
不同于文献[19]以及上述研究垂线偏差的文献,文中以全站仪观测量斜距、水平角、垂直角为研究对象,通过几种坐标系间转换关系,推导出垂线偏差对全站仪观测值的影响公式。文中通过仿真试验就垂线偏差对水平角、垂直角及控制网点位偏差的影响,进行更加具体的研究分析。
3.1 垂线偏差对水平角的影响
由式(15)可以看出,影响水平角的因素比较复杂,除了垂线偏差的影响,还有垂直角和大地方位角及纬度的影响。有关垂线偏差,在地势平缓地区,垂线偏差一般小于10″,但是在地形起伏复杂的山区,垂线偏差数值较大,最大可为45″[10]。
在仿真试验中取垂线偏差分量ξ=5″、η=5″(需要注意的是,实际应用中垂线偏差大小与点位地形直接相关,这里的取值只是便于仿真试验分析),固定点位的大地纬度B=30°N,分析在不同的大地方位角(0°~360°)、不同的垂直角(1°、5°、10°、15°、20°、25°、30°)的情况下,垂线偏差对水平角的影响。试验结果如图4所示。
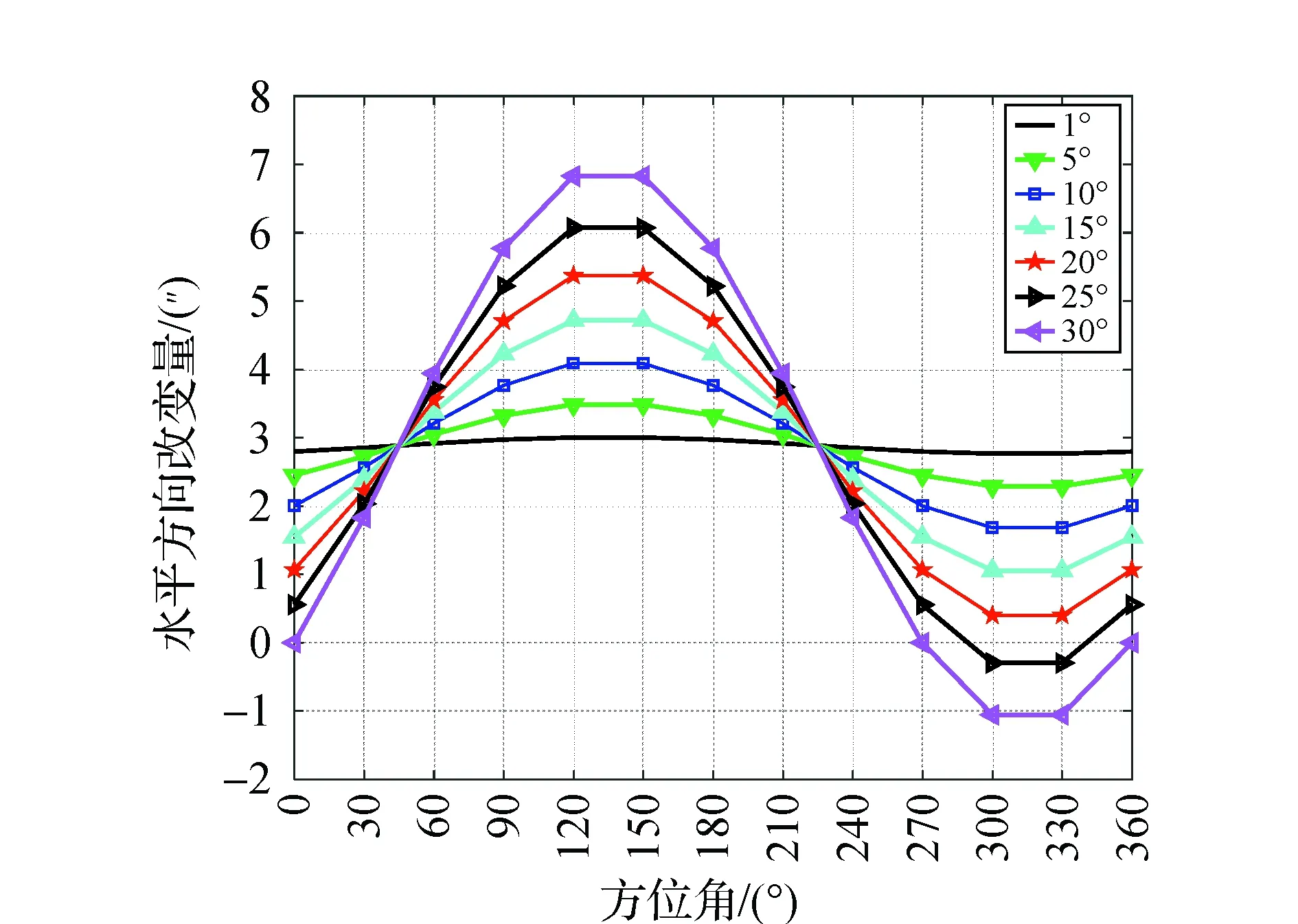
图4 ξ=5″,η=5″时,垂线偏差对水平角观测值的影响
由图4可以看出,垂线偏差对水平角的影响随方位角有规律变化,这种规律性变化主要是由于垂线偏差在任意方位的分量引起的;其次,垂线偏差对水平角的影响与垂直角有关,具体表现为当垂直角较小时(v=1°,图中黑色无标记点线条),垂线偏差对水平角的影响较小,此时的影响主要由式(15)中ηtanB项引起,随着垂直角的增大,垂线偏差对水平角的影响也在逐渐变大,而且引起的水平角误差已经超过水平方向的观测精度。
此外,在以上仿真试验的基础上增加了一组试验用来分析较大垂线偏差对水平角的影响:取垂线偏差分量ξ=35″、η=35″,其余试验变量不变,试验结果如图5所示。

图5 ξ=35″,η=35″时,垂线偏差对水平角观测值的影响
由图5可知,在垂线偏差较大时,随着垂直角的增大,水平角受垂线偏差影响较为严重,此时引起的水平角误差已经严重超过水平方向的观测精度。
3.2 垂线偏差对垂直角的影响
由式(16)可知,垂直角主要受垂线偏差影响。因此,在仿真试验中分别取(ξ=5″,η=5″)、(ξ=15″,η=15″)、(ξ=25″,η=25″)、(ξ=35″,η=35″)等4组垂线偏差数值,分析在不同方位角观测值下垂线偏差对垂直角的影响,试验结果如图6所示,图中黑色虚线对应的垂直方向改变量为0。

图6 不同垂线偏差与方位角对垂直角的影响
由图6可以看出,垂线偏差对垂直角的影响是十分严重的。在垂线偏差较小时,垂线偏差对垂直角的影响随方位角变化不明显;随着垂线偏差的变大,垂线偏差对垂直角的影响也随之变大,而且数值变化较大,从图中可以看出,其数值影响远远超出了垂直角的观测精度。
相比于垂线偏差对水平角的影响,从图4、图6可以看出,在ξ=5″,η=5″时,垂线偏差对水平角的影响数值在-2″~7″,而垂线偏差对垂直角的影响数值在-7″~7″。从图5、图6可以看出,在ξ=35″,η=35″时,垂线偏差对水平角的影响数值在-8″~48″,而垂线偏差对垂直角的影响数值在-48″~48″。此外,实际测量中垂直角一般不会太大,垂线偏差对水平角的影响数值要比上面所提到的数值小。因此,就垂线偏差影响数值范围来看,可以看出垂线偏差对垂直角的影响要大于垂线偏差对水平角的影响。
3.3 垂线偏差对控制网点位偏差的影响
全站仪属于空间球坐标测量系统。当全站仪瞄准某一目标时,通过其水平度盘和垂直度盘可以获得水平方向和垂直角读数,通过测距模块可以获取仪器中心到目标点的距离,从而建立起以仪器中心为坐标原点的球坐标系。因此,由式(9)可以得到目标点相对于测站中心的位置。求全微分得到:

(19)
将式(15)~式(17)代入式(19),通过计算可以得到垂线偏差对目标点的点位偏差影响。

(20)
式中:Δ为垂线偏差引起的控制点点位偏差;子午分量ξ和卯酉分量η都是以弧度为单位。
以式(20)为仿真试验依据,通过三个仿真试验,分析在不同垂线偏差、不同垂直角和不同方位角情况下控制网点位偏差受垂线偏差的影响。
仿真试验一:固定方位角为135°、垂直角v=1°及大地纬度B=30°N,分别设置4组垂线偏差分量值(ξ=5″,η=5″)、(ξ=15″,η=15″)、(ξ=25″,η=25″)、(ξ=35″,η=35″)和不同的距离值(0~1 000 m),试验结果如图7所示。

图7 点位偏差随距离和垂线偏差的变化
由图7可以看出,垂线偏差对坐标计算的影响是不可忽略的,且随着距离的增加,由垂线偏差引起的点位偏差数值在线性增加;此外,随着垂线偏差的增大,点位偏差在迅速变大,当距离较远时点位偏差已达到厘米级(图中黑色虚线(细)),甚至达到dm级(图中黑色虚线(粗))。因此,在地势起伏较大的地区,须考虑垂线偏差的影响,并采用正确的方法对观测数据进行处理。
仿真试验二:固定方位角(a=135°)、垂线偏差(ξ=5″,η=5″)及大地纬度(B=30°N),分析在不同距离(0~1 000 m)和垂直角(1°、5°、10°、15°、20°、25°、30°)情况下垂线偏差对点位偏差的影响,试验结果如图8所示。
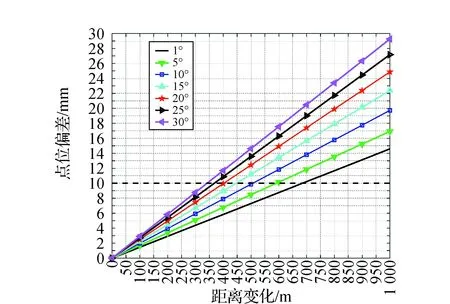
图8 点位偏差随距离和垂直角的变化
由图8可以看出,在垂直角较小、短距离范围内由垂线偏差引起的点位偏差在mm级;随着垂直角和距离的增加,垂线偏差引起的点位偏差也在不断地变大,达到了cm级(图8中黑色虚线)。
仿真试验三:固定观测距离(r=100 m)、垂直角(v=1°)及大地纬度(B=30°N),分析不同方位角(0°~360°)情况下点位偏差随垂线偏差的变化,试验结果如图9所示。
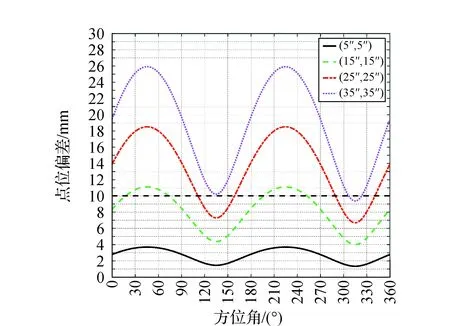
图9 点位偏差随方位角和垂线偏差的变化
由图9可以看出,在垂线偏差较小时,点位偏差随着方位角的变化不是很明显;随着垂线偏差的增大,点位偏差随着方位角的变化明显,且变化程度更加剧烈。此外,图9中方位角约为135°和315°时垂线偏差的影响最小,在方位角约为45°和225°时垂线偏差的影响最大,因此,垂线偏差对点位的影响与方位角有着密切的关系。另外,由图9可知,在垂线偏差较大时,垂线偏差的影响达到了cm级(图9中黑色虚线)。
4 结束语
文中基于垂线偏差的定义,通过建立大地站心地平直角坐标系、天文站心地平直角坐标系和局部曲线球面坐标系,分析坐标系相互转换过程中,垂线偏差对全站仪观测值斜距、水平角、垂直角的影响规律,进而推算得出控制点坐标受垂线偏差的影响程度,然后通过仿真试验,对不同情况下垂线偏差引起的三维控制网点位偏差进行分析。
1) 垂线偏差对全站仪观测值的影响可以归纳为:垂线偏差对斜距观测值没有影响,对垂直角观测值的影响大于对水平角观测值的影响。
2) 除了垂线偏差对控制网点位偏差的影响,垂直角过大也会影响控制点的点位误差。因此,为了有效削弱垂线偏差的影响,在控制网的设计、选点以及整置仪器和照准目标时,要尽量保证视线水平或接近水平。
3) 对于全站仪三维控制网数据处理,须考虑垂线偏差的影响,尤其是在垂线偏差较大的地区,其影响可以达到cm级甚至dm级。对此,可以考虑将垂线偏差作为参数纳入平差模型中,通过平差计算有效减弱垂线偏差对观测值的影响,从而提高平差结果的精度和可靠性。
