一个中国边缘海的风-浪-流预报系统
2022-11-03董昌明LIMKAMSIANKennyThiamChoy蒋星亮曹玉晗嵇宇翔陆晓婕周书逸韦销蔚0BETHELBrandonJustin徐广珺董济海孙文金王海丽单海霞王东霞滕芳园谢文鸿游志伟王子韵林连杰
董昌明,LIM KAM SIAN Kenny Thiam Choy,蒋星亮,曹玉晗,嵇宇翔,王 森,余 洋,陆晓婕,周书逸,韦销蔚0,BETHEL Brandon Justin,徐广珺,董济海,孙文金,王海丽,单海霞,王 锦,王东霞,滕芳园,曹 茜,谢文鸿,游志伟,王子韵,林连杰
(1.南京信息工程大学 海洋科学学院,江苏 南京 210044;2.南方海洋科学与工程广东省实验室(珠海),广东 珠海 519000;3.无锡学院,江苏 无锡 214105;4.复旦大学 大气与海洋科学系,上海 200438;5.江苏海洋大学 海洋技术与测绘学院,江苏 连云港 222005;6.江苏省连云港市气象局,江苏 连云港 222006;7.江苏海洋大学 海洋资源开发研究院,江苏 连云港 222005;8.福建省气象台,福建 福州 350007;9.清华大学 地球系统科学系,北京 100084;10.广西壮族自治区气象局,广西 南宁 530022;11.广东海洋大学 电子与信息工程学院,广东 湛江 524088;12.中国科学院 南海海洋研究所,广东 广州 510301;13.中国船舶集团 海装风电股份有限公司,重庆 401123)
作为建立在物理框架下面向应用的基础学科,物理海洋学涵盖海浪、海洋环流等过程,还受到海气相互作用和气候变化等过程影响[1-2],其采用的研究手段包括卫星和现场观测、数值模拟和理论分析。由于海洋环境研究中难于观测,实测数据相对匮乏,数值模拟成为科学研究和业务应用的主要手段。数值模拟技术问世以来,各国研究者争相研发,已在海洋灾害预警预报、海洋环境安全保障、海洋权益维护、海洋资源开发、海上工程、气候预测等方面实现了业务化应用。中国的海洋气象数值模拟也在过去的40 a 期间取得了长足的进步,在多源数据同化、海气耦合模拟、模式创新改进、区域业务化精准预报等方面取得了丰硕的成果[3-7]。20 世纪80 年代Dickinson 等[8]和Giorgi[9]提出区域模拟想法,随着全球海洋技术发展,中国海气数值模拟已成为海洋气象业务的坚强技术后盾,也成为学科发展不可或缺的推动力[10-13]。
20 世纪90 年代末全球海洋资料同化实验GODAE(Global Ocean Data Assimilation Experiment)的发起,极大地促进了全球海洋实时多源观测数据集成融合技术、海洋数据同化技术和海洋预报系统的发展[14]。海洋数据同化技术的理论基础是以数值模式作为动力学驱动,提炼观测信息。即从包含误差的空间分布不均匀的实测资料中,依据动力系统自身的演化规律来确定海洋系统状态的最优估计。现代海洋资料同化方法,包括最优插值(Optimal Interpolation,简称OI)、变分方法(3 Dimensional Variational 和 4 Dimensional Variational,分别简称 3D Var 和 4D Var)和滤波方法(Filtering)。资料同化能够改进海洋大气模式的模拟和预报水平。随着研究深入,国内外学者开始广泛采用多模式耦合系统进行全球预报技术的研究,例如国际耦合模式比较计划CMIP5(Coupled Model Intercomparison Project Phase 5)和美国业务化全球海洋系统基于HYCOM(HYbrid Coordinate Ocean Model)海洋模式。Chelton 等[15]和Xie 等[16-17]通过对比卫星数据,提出粗分辨率的全球耦合模式无法分辨海气相互作用过程和中尺度现象。因此高分辨率、区域化的海气耦合模式成为研究、业务工作的一个必然选择。区域海气耦合模式近年来得到快速发展。例如,美国针对沿海、五大湖海气信息,成立了综合海洋观测系统IOOS(The Integrated Ocean Observing System,https://ioos.noaa.gov/)协调美国现有的观测、模型、系统等,以分区域模拟和综合整合的方式进行集成。其中南加州海岸海洋观测系统SCCOOS(Southern California Coastal Ocean Observing System,https://sccoos.org/)便是IOOS 包含的十一个区域之一[18]。作为南加州的区域观测系统,SCCOOS 通过海洋生物、化学和物理观测和数值模拟,发展了支持短期决策和长期评估的近实时可用的业务化系统。例如SCCOOS 针对在2018—2019 年Imperial 海滩的Cardiff和Coronado 的现场观测[19],得出区域化经验关系,且对参数化方案进行了改进,获得了更精确的美国西海岸潮位观测模型。
目前我国海洋科学研究者将海洋数值模式与大气、陆面、海冰、生物地球化学等过程耦合,组成耦合的地球模拟系统[20-21]。21 世纪初,中国科学院大气物理研究所推出了海洋环流模式LICOM 1.0(LASG/IAP Climate system Ocean Model)[22],随后逐渐完善形成面向全球的海陆气地球系统模式GOALS(Global Ocean-Atmosphere-Land System)[23]。同时,基于LICOM 3.0,我国研究者们陆续研发了全球涡分辨海洋预报系统LFS(LICOM Forecast System)和全球涡分辨率海浪-潮流-环流耦合数值模式FIO-COM(coupled ocean model developed by the First Institute of Oceanography),并实现业务化应用[24-29]。在近10 a,耦合模式的发展更加迅猛,先后有国家气候中心推出的BCC-CSM(Climate system model developed by Beijing Climate Center)系列[30]、自然资源部第一海洋研究所自主研发的FIO-ESM(Earth system model developed by the First Institute of Oceanography)[20]和北京师范大学的BNU-ESM(Earth system model developed by Beijing Normal University)[31]等模式。
近些年随着计算机软硬件的发展,以深度学习为核心的人工智能技术迅速崛起。人工神经网络以其良好的自适应性和非线性映射能力,为解决物理机制复杂的非线性问题提供了较好的基础,并应用于各行各业。在风速预报方面,曾使用BP(back propagation)神经网络[32-33]、RBF(Radial Basis Function)网络[34]和支持向量机(Support Vector Machine,简称SVM)[35]等神经网络算法对风电功率预测展开过的研究表明神经网络不仅可以准确地预测风电功率,还可以有效提升预测效率。一直以来循环神经网络(Recurrent Neural Network,简称RNN)作为时序预测问题的核心算法,对时序数据具有更好的适应能力,但是依旧存在梯度消失和对数据的长期依赖等问题。在RNN 算法的基础上,LSTM(Long Short-Term Memory)算法、TCN 算法(Temporal Convolutional Network)等模型被相继提出并应用于风速预报[36],进一步提高了预报的准确性和精度。LightGBM(Light Gradient Boosting Machine)是一种基于梯度提升树(Gradient Boosting Machine,简称GBDT)的数据模型,可以在占用较少内存并提高预报精度的同时,大幅度提高预测速度。目前LightGBM算法已经广泛应用于降水的预报订正、风电功率预报[37]以及大气海洋数据重构等领域。
综上所述,区域海气耦合模拟系统的研发和建立,不仅能够丰富我们对区域大气过程、区域海洋过程及局地海气相互作用过程的理解,而且在业务运行、预警预报领域具有良好的应用前景。我们基于海气模式40 a 的研究积淀,立足我国边缘海域海气多要素预报的实际需求,采用多模式高分辨率离线耦合的方式(离线耦合的频率减少,提高预报效率),同时结合了人工智能技术以及南京信息工程大学海洋数值模拟与观测实验室研发的从海面到海底的一系列参数化方案,构建了一种针对中国边缘海的风-浪-流多参数耦合预报系统,旨在为我国边缘海关键海区开展精准、及时、全面的海气要素预报和极端天气预警提供科学参考。
1 研究方法
本预报系统主要由数据下载、中国沿海全区域模式、预报集成系统处理、小区域模式以及可视化数据显示五个模块组成。其中数据下载模块主要为耦合模式模块提供已同化观测资料的初始场,以及边界场等输入数据;全区域模式模块主要为风-浪-流三种模式基于同化模块提供的数据进行耦合计算,得到初步的物理要素结果;预报集成系统处理模块负责对模式结果进行后处理,以及利用大区域结果获取小区域模式模块的输入数据;最后通过可视化数据显示模块将最终的预报结果展示出来。预报系统的总体设计方案如图1 所示。
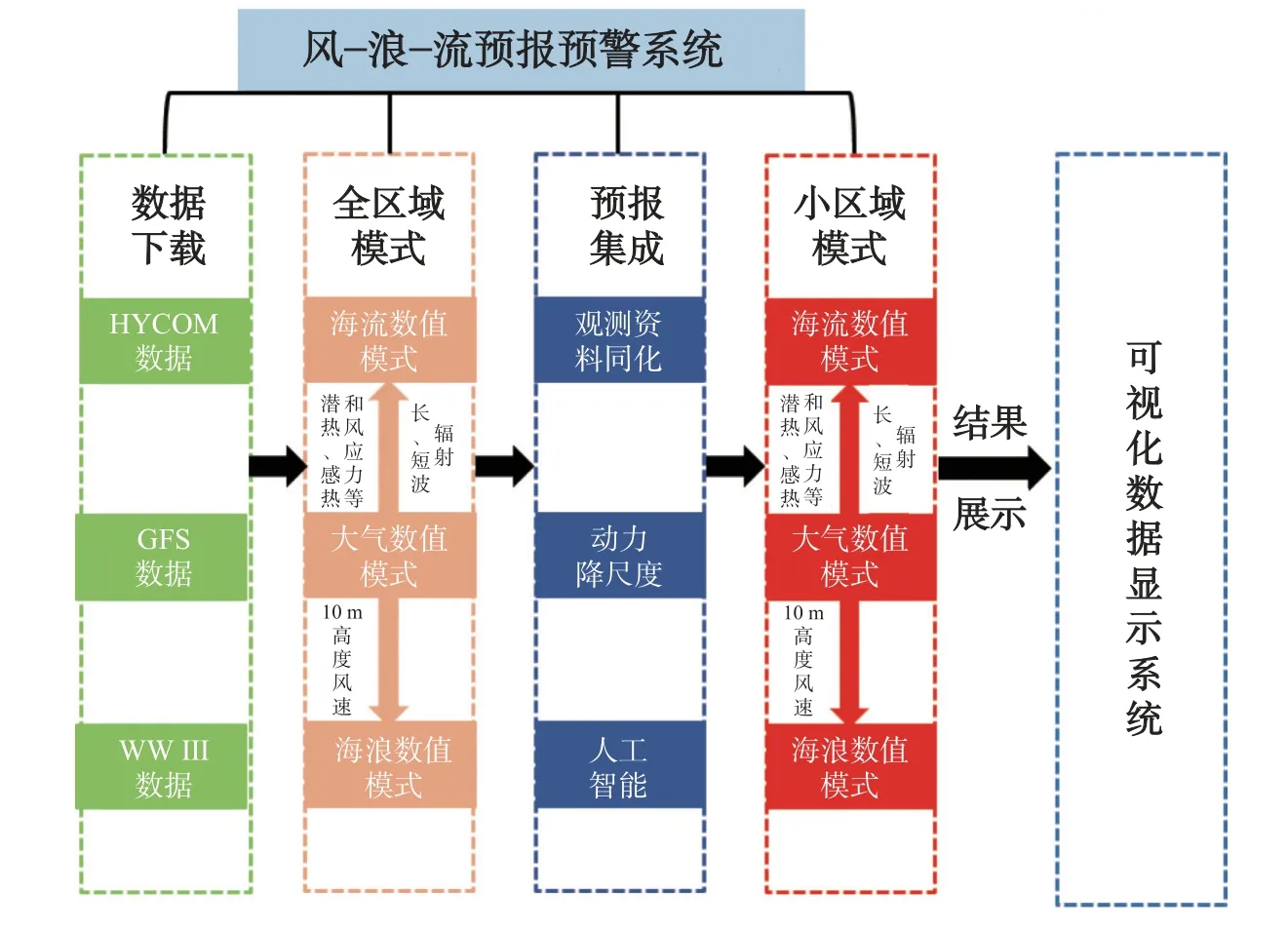
图1 预报系统总体设计结构Fig.1 Overall forecast system design structure
1.1 大气数值模式(Weather Research and Forecasting,简称WRF)
WRF 模式是一个非静力、准压缩、跟随地形的三维大气模式,为模拟中尺度和微尺度大气运动提供了多种先进的物理参数化方案。在本预报系统中,大气模式采用Advance Research WRF(ARW)3.8 版本。模式在垂直方向上设置了38 层,水平方向上结合动力降尺度(ndown)模块进行了3 层离线嵌套。空间分辨率为9 km×9 km,模拟范围为103°16′12″~136°40′48″E,13°36′36″~43°34′12″N(图2)。该模式每天在0:00UTC 进行初始化,运算大气变量7 d 的预测结果,模式的侧向和表面边界使用全球天气预报系统(Global Forecast System,简称GFS)数据进行强迫,并通过ndown 模块为3 km×3 km 的第一层嵌套区域生成输入场文件,同样的步骤用于生成最内层的1 km×1 km 第二层嵌套区域的模式输入场文件。
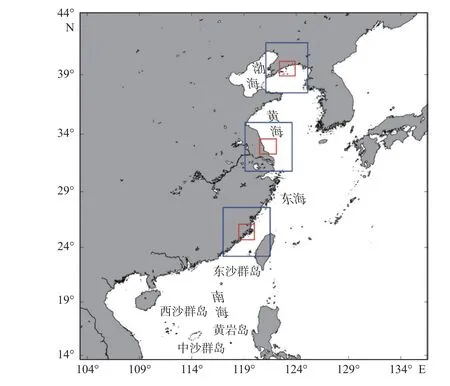
图2 WRF 模式区域(为第一层嵌套区域,为第二层嵌套区域)Fig.2 WRF model domain(the first level nesting is shown in blue,the second level nesting is in red)
大气模块使用Kain-Fritsch 积云对流方案[38]计算云和亚网格尺度的对流,使用WRF single-moment sixclass 水汽微物理方案[39]模拟网格尺度的降水过程,使用快速辐射传输模型[40]模拟长波辐射,使用Dudhia方案[41]进行短波辐射模拟。在行星边界层中,采用MYNN2.5 湍流方案[42]。
1.2 海流数值模式(Coastal and Regional Ocean Community model,简称CROCO)
海流数值模块采用的是CROCO 模式,该模式的前身是区域海洋模式(Regional Ocean Modeling System,简称ROMS)的Agrif 版本。这是一个分裂显式、自由表面的海洋模式。模式采用Arakawa C 网格,水平流速的2 个分量及标量(温度、盐度、密度、水位等)分别处于岔开的网格点上。该模式垂直坐标为地形自适应坐标,具有在需重点关注的深度进行垂向加密的能力。模式使用较短的时间步长来驱动海表面变化以及正压动量,使用较长的时间步长来驱动温度、盐度及斜压动量,具有更优的稳定性和计算效率。同时该模式具备了丰富的参数化方案,内嵌多个模块,功能完善且架构灵活,目前已广泛应用于多种尺度的海洋学研究中。
CROCO 采用静力平衡及包辛尼斯克假设下的纳维斯托克斯方程作为控制方程。全区域模式范围选取为105°00′00″~135°00′00″E,15°00′00″~42°00′00″N。地形提取自全球水深地形数据(Earth′s surface that integrates land topography and the ocean bathymetry dataset,简称ETOPO)。全区域的水平分辨率设置为(1/24)°,垂向划分为40 层,且在表面进行了加密。模式的西边界全为陆地,因此设置为闭边界,剩余3 个侧边界设置为开边界。自由水位与正压流速分别采用Flather 和Chapman 边界条件,三维流速及温盐则采用辐射边界条件,表面强迫采用WRF 模式的输出结果。侧边界场数据采用HYCOM 的预报场,包含未来7 d 内逐3 h的温度、盐度、海表面高度及流场数据[43],其水平分辨率为(1/12)°,垂向分为40 层。此外,模式包含了潮汐和径流驱动,其中潮汐数据来自TPXO8[44],该数据水平分辨率为(1/30)°。模式还包含了M2、S2、K1、O1、N2、P1、K2及Q1八个主要分潮。径流的数据来自Dai 和Trenberth 全球河流及陆架径流数据集[45],模式主要选取了长江及黄河。模式垂直混合采用KPP(K-Profile Parameterization)一阶模型参数化方案,内模时间步长设置为120 s,内外模时间步长比设置为60。
1.3 海浪数值模式(Simulating Waves Nearshore,简称SWAN)
海浪数值模块采用荷兰代尔夫特大学土木工程系开发的第三代海浪模式——SWAN。SWAN 模式采用基于欧拉近似的作用量谱平衡方程、线性随机表面重力波理论对波浪进行模拟。该模式专门用于浅水、近岸的海浪模型,对海岸、湖泊和河口的波浪具有良好的模拟效果。SWAN 模式可以通过给定风场、地形和流场来计算海岸、湖泊和河口的统计波浪参数,适用于任意时空尺度的表面风成重力波,可模拟以下波浪过程:空间域的波浪传播、地形或流引起波浪的折射、绕射,地形及流引起的浅水效应,反向流引起的波浪反射,波浪在障碍物前的绕射、阻滞及反射。另外,在笛卡尔坐标系下SWAN 模式还可以有效模拟波浪引起的增水过程[46-48]。
在本系统中,海浪数值模拟预报区域为105°00′00″~135°00′00″E,15°00′00″~42°00′00″N,空间分辨率为4 km×4 km,时间分辨率为3 h。模式地形水深数据与海流模式一致,均采用ETOPO 高程数据[49],驱动模型的风场数据来自WRF 模式的输出结果。模式中还考虑了底摩擦、白帽、反射、三波和四波的波-波相互作用,以及水深变化诱发波浪破碎等物理过程,并采用二维非定常计算模式[50-51]。
1.4 同化模块
本预报系统的同化模块采用2 种方法:最优插值法和WRF 数据同化方法(WRF Data Assimilation,简称WRFDA)。WRFDA 是由美国国家大气研究中心(National Center for Atmospheric Research,简称NCAR)开发的WRF 模式系统的组成部分之一。
1.4.1 最优插值法
最优插值法(Optimal Interpolation,简称OI)是一种相对简单但功能强大的数据同化方法。在20 世纪70和80 年代,世界上大多数气象中心都使用最优插值法进行数值天气业务预报。直到最近10 a,才逐渐有从最优插值法转向变分方法的过渡。在最优插值法中只有空间维度。其命名是因为在理论上它是一个最小方差估计方式,而在实践中,它永远不会是最优的,因此又被称为“统计插值”技术。只有当我们真正知道错误统计信息时,最优插值法才是最优的。
数值天气预报的最优插值法作为间歇性(0:00、6:00、12:00、18:00UTC)数据同化方案应用,而不是连续插入数据。观测结果以分析时间为中心分为6 h 间隔。估计值由加权最小二乘法拟合观测值和数值天气预报模式预报提供的背景场所提供。权重是观测值和背景场的误差协方差矩阵的倒数。不管分析时间步长如何,取值都使用相同的背景误差协方差,所以假设背景场在所有时间都具有相同的统计量。这意味着假设背景误差是平稳的。但在实际中,背景误差存在逐月变化。在任意给定时间的同化产品是对格点上每个模式预报变量的完整分析,然后将其用作预报模式集成的初始状态。
1.4.2 WRFDA
WRFDA 是一个先进的数据同化系统,直接包含在WRF 模式中,可提供三维/四维变分(3D/4D Var)以及变分/集成混合技术。WRFDA 已经被广泛用于实际应用和科学研究,被多个国际业务数据同化系统、业务中心、高校和研究机构用于数据同化的研究。其具体表达式:

式中:x表示基于背景预测xb和观测值y0的大气真实状态的最大似然估计;B、O、E分别是背景、观测值和背景误差协方差矩阵,我们在使用时采用的背景误差协方差是WRFDA 中的CV5。背景误差是对观测算子P中引入的误差的估计,用于将格点分析值x转换至观测空间y=P(x)。本预报系统的数据同化部分选用了三维变分方法。模型将来自中国气象局固定站点和自动气象站(Automatic Weather Stations,简称AWS)的表风速、气温、相对湿度和压力的观测数据,同化到9 km×9 km 分辨率的WRF 输入场中。
1.5 智能预报方法
除了使用以上基于数值模式的预报方法,本系统中还加入了智能预报模块。相较于数值模式方法,以深度学习为核心的智能预报方法在预报效率上更具优势,使用方式也更为灵活。该方法除了可以直接对预报参数实现快速准确的预报,还可以将其应用于数值模式输出结果实现预报订正,进一步优化预报效果。本系统基于ConvLSTM(Convolutional LSTM Network)和TCN-LightGBM 两种方法分别开展了波浪有效波高预报[52]和风速预报订正。
1.5.1 ConvLSTM
ConvLSTM 是从传统LSTM(Long Short-term Memory)演变而来。LSTM 在时序数据问题上已经被广泛应用,但是在面对二维数据时,若将输入展开成全连接层处理不仅会耗费巨大的计算资源,并且难以捕获到二维空间场的空间相关性以及空间特征。基于此,Shi 将LSTM 中的全连接用卷积结构代替,开发出ConvLSTM 方法[53]。ConvLSTM 与LSTM 的主要区别是将矩阵乘法换成了卷积操作,具体的表达式:

卷积操作可以很好地提取数据的空间特征,而LSTM 可以很好地提取数据的时间相关性。因此ConvLSTM 同时具备时序建模和刻画空间特征的能力,适用于像海洋波浪的有效波高等时空相关性较强的物理量的预报。
1.5.2 TCN-LightGBM
TCN 算法(Temporal Convolutional Network)可以实现时间序列的卷积,性能优于循环神经网络。该算法采用一维卷积网络,其中包括因果卷积、扩张卷积和残差模块,曾被应用于风速预报。相较于传统的LSTM 算法,TCN 引入的因果卷积考虑了上下层之间的因果关系,其使用的残差连接和扩张卷积有效避免了梯度消失和梯度爆炸的问题,具有梯度稳定、并行性良好、占用内存低和感受灵活等优点,从而有效提高了预报的准确性和预报精度。
LightGBM 是一种基于梯度提升树(GBDT)的数据模型,可以在占用较少内存并提高预报精度的同时,大幅度提高预测速度。其采用带有深度限制的Life-wise 增长策略,而非其他决策树算法常采用的按层生长策略。Life-wise 策略在所有遍历叶子中,找到分裂收益最大的叶子节点进行分裂,如此往复。与其他决策树按层分裂的策略相比,该策略在相同的分裂次数下可以获得更好的精度,能有效减少对收益较低节点的分裂计算,从而节省计算资源。为防止生成较深的树,该方法限制了决策树的最大深度,在保证算法精度的同时,有效防止了过拟合现象的出现。目前LightGBM 算法已经被广泛应用于降水的预报订正、风电功率预报[37]以及大气、海洋数据重构等领域。
为了进一步提升算法性能,本系统将TCN 和LightGBM 算法相互结合,提出基于TCN-LightGBM 算法的风速预报订正模型,首先使用TCN 算法进行风速预报,然后使用LightGBM 算法进行订正,将24 h 内的风速预报均方根误差(RMSE)提升了约20%。
1.6 初边界条件设置
WRF 模式的初始条件和边界条件由GFS 数据[54]提供。GFS 是由美国国家环境预报中心(National Centers for Environmental Prediction,简称NCEP)提供的天气预报模型产品[54]。该数据集包含温度、风应力、降水、土壤湿度、大气臭氧浓度等数十种变量。GFS 的产品数据[54]覆盖全球,平均水平网格的精度为28 km。该数据集包含未来16 d 的天气预报。
海流预报模块每日预报的初始场来自最近一次更新的HYCOM 当日预报场。初始场中包括该时刻三维温度场、盐度场、流场及二维海表面高度场。边界场同样来自HYCOM,选取最近一次更新的HYCOM 未来7 d 预报的温度场、盐度场、流场及海表面高度场。为提高下载速度,仅下载以模式边界为中心,宽度为2°的带状区域,插值制作成时长为7 d 的边界驱动场。
CROCO 模式的大气强迫数据来自WRF 模式输出的结果,WRF 模式需要输出的变量:离地面10 m 高度的风场,离地面2 m 高度的绝对湿度及温度、海表面气压、向下长短波辐射、反射率、表面温度、表面辐射率以及降水率。利用以上变量计算出离地面2 m 高度的气温、绝对湿度、降水率、风场、净短波通量及净长波通量,作为计算块体通量所需的变量输入CROCO 模式中进行强迫。
海浪预报模块的初始频谱根据联合北海波浪计划(Joint North Sea Wave Project,简称JONSWAP)谱和当地风速计算得到,初始场采用热启动。计算区域的边界有陆地或水边界,陆地边界不会产生波,将入射波的能量吸收;水边界条件可以根据现场观测,也可以通过其他波浪模型模拟得到。通常水边界只有1 个或2 个迎浪边界,迎浪边界条件可以较准确地确定,但是横向边界条件比较难确定。模式假定没有波浪从该边传入计算区域,但波浪能通过横向边界自由离开计算区域,此假定模型计算水域存在一定误差,因此横向边界的选择应该距离研究水域足够远,才能保证模拟结果的准确度。模式的水边界采用太平洋岛屿海洋观测系统(Pacific Islands Ocean Observing System,简称PacIOOS)提供的WAVEWATCH III(WW III)模式计算的波浪参数[55],包括混合浪的有效波高、平均波向和平均波周期,该模式的时间分辨率为1 h,空间分辨率为0.5°×0.5°。
该预报系统的潮汐模块设置3 个潮汐开边界条件,分别为东边界、南边界和北边界,采用模拟区域内潮汐数据8 大分潮的潮位和潮流调和常数值作为开边界驱动系统模拟。该系统采用的潮汐数据为TPXO8 数据集,该数据集包含8 个主要分潮(M2、S2、N2、K2、K1、O1、P1、Q1)、2 个较长周期分潮(Mf和Mm)以及3 个浅水分潮(M4、MS4和MN4)的潮位、潮流等数据信息[44]。
1.7 参数化方案
本预报系统中将最新发表的一些湍流参数化方案应用至预报系统,从而提高预报的准确率,这是本预报系统的一个关键技术。目前添加到这个预报系统中的这些参数化方案是由南京信息工程大学海洋数值模拟与观测实验室研发的。这些参数化方案的验证结果表明它们对模式结果的影响是显著的。浪致混合作用可加深上边界层混合,通过对比有、无浪致混合参数化方案的模拟结果,我们发现夏季浪致混合作用可改善温度模拟的偏高现象,冬季浪致混合作用可改善混合层模拟的偏浅现象,加入波浪影响参数化方案的模拟效果好于未考虑的[56-57]。对称不稳定的参数化改善了模型对海洋混合层模拟偏深的问题,提高了模型对海洋混合层模拟的准确性[58]。
1.7.1 浪致混合
海洋波浪对海洋物理过程的主要影响之一是浪致垂向混合。浪致混合过程可以通过参数化方案来实现。考虑波浪诱导的朗缪尔环流对上边界层混合的影响,被称为海浪间接作用参数化方案。
利用大涡模拟方法[56-57]模拟朗缪尔环流,对浪致扩散进行无量纲分析,考虑波浪破碎的影响,对模式数据结果进行拟合计算,提出由浪致混合引起的浪致扩散函数[57]:

式中Kd表 示与深度z、边界层深度hb、海表面摩擦速度u*以 及表层平均朗缪尔湍流数LaSL有关的由波浪作用引起的扩散函数。其中变量A和B控制Kd扩散曲线的弯曲度。平均朗缪尔数与边界层深度、海表面摩擦速度以及斯托克斯漂流有关,在研究中变量A和B可定义为与平均朗缪尔数有关的函数,Wang 等[57]通过一系列实验对变量A和B拟合得到:

将波浪的影响直接叠加到原来的KPP 参数化方案的基础上,有效地增大了涡扩散系数。
1.7.2 亚中尺度
对称不稳定不但对全球海洋能量级串的平衡起着重要的作用,还影响大气对海洋的动量输入、海洋上混合层的动力学和热力学结构。因此,对称不稳定的参数化是海洋模式发展和优化必须考虑的问题。
基于准地转理论,对称不稳定的发生要求海洋中的位势涡度(Potential Vorticity,q)与背景场的行星涡度(f)符号相反[59],即fq<0,对于满足热成风关系的流场,如锋面处,总是倾向于使得fq<0,以便有利于对称不稳定的发生。当上混合层内存在锋面时,对流过程和对称不稳定的相互作用最终会将上混合层(其厚度记为Hm)分为2 个部分:接近表层由对流过程主导的部分,其厚度记为h。基于此,对称不稳定的能量转化率(Geostrophic shear production,简称GSP)参数化表达[60]:
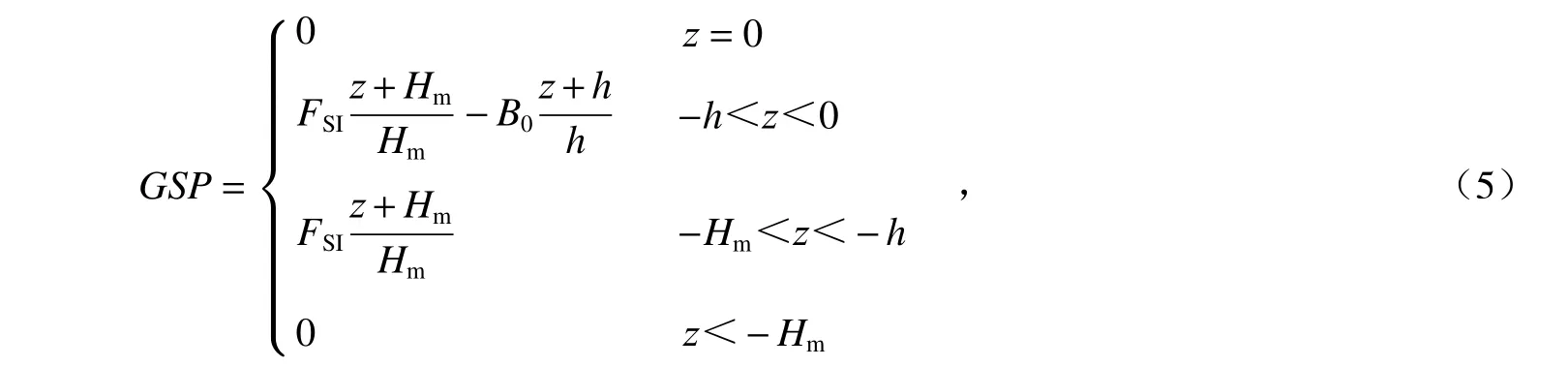
式中:FSI=EBF+B0,而EBF=为表层Ekman 输运引起的浮性通量;为表层增降温或者蒸发降水导致的浮性通量,g表示重力加速度常量,α表示海水的热膨胀系数,Qnh为表层净热通量,Cp为海水定压比热容,β 表示海水的盐收缩系数,EP表示淡水净通量(Qnh或EP为正值时海水失去浮性),S表示海水的盐度。基于上述转化率便可得到对称不稳定诱导的黏性系数和扩散系数,代入相关的动量控制方程,便可实现对称不稳定过程的参数化。区域海洋模型和全球海洋模式的模拟结果表明,该参数化方案可以很好地将对称不稳定的影响引入到模型结果中,并提升模式的模拟效果[58,61-62]。
1.7.3 涡旋诱导的沿等密度面和跨等密度面混合
中尺度涡旋占海洋全球海洋表面的25%~ 30%[63],并且包含了大约90%的海洋总动能[64],因此其在海洋能量串级中发挥着至关重要的作用。数值模式发展的早期,受制于计算机能力的限制,中尺度涡旋曾经是气候模式参数化的核心内容之一。但是随着模式分辨率的逐步提高,涡旋分辨已经在众多的气候模式中实现。中尺度涡旋诱导的双重混合(即沿等密度面与跨等密度面的混合)成为了当前模式参数化必须解决的前沿科学问题之一。
“通量梯度关系”中的涡旋输运张量是连接次网格湍流通量与模式已分辨尺度物理量梯度之间的桥梁。采用由Bachman[65]提出的示踪物伪逆方法,对理想中尺度涡旋诱导的双重混合现象进行高分辨率的模拟分析(水平分辨率500 m),Sun 和Dong[66]提出了中尺度涡旋诱导的双重混合参数化。该参数化方案将涡旋输运张量T表达为层化强度、涡旋垂向深度(He)、水平锋面强度科氏参数(f)以及瑞查德森数(Ri)的函数。其中,g、ρ、b分别表示重力加速度常量、海水的密度和浮性。涡旋输运张量T在笛卡尔直角坐标系中具体的表达式:

其相应的在等密度层坐标中的表达形式可以借助坐标转换矩阵予以实现。将上述双重混合参数化方案代入相关的动量和示踪物粒子的控制方程,便可实现在涡分辨的模式中对涡旋诱导的双重混合过程的参数化。
1.7.4 海山诱导混合
海山等复杂海底地形在海洋混合中往往具有重要的作用和意义。由于全球模式受计算资源的限制,网格分辨率偏低,不足以分辨出海山地形,导致海山诱导的部分垂向混合被忽略。海底地形诱导混合参数化方案的应用有利于引入这部分被忽略的物理过程,从而改进模式对全球混合的模拟能力。
通过海底地形粗糙度tr代替海底地形起伏变化,海底地形粗糙度的计算公式:

式中:hi是 对应格点的地形高度;是 1°×1°网格区域内地形高度的均值;N是1°×1°网格区域内对应格点数。地形粗糙度与海洋混合之间存在很好的相关关系[67]。利用Argo 浮标资料,结合全球海底地形粗糙度,拟合得出经验性的基于地形粗糙度的全球背景混合系数k的关系式:

混合强度受海水与海底地形之间距离的影响,因此全球背景混合系数满足垂直结构函数F(x,y,z)[68-69]:

式中:H(x,y)为 水面到海底的距离;z为 水深;ζ 为垂直衰减尺度,文中取水深800 m;C0根据海洋上层2 000 m 范围内的混合系数数值取为2×105。
复杂海底地形诱导的混合可表达[70]:

2 数据和自动化采集
2.1 数 据
2.1.1 风速观测数据
风速观测数据由位于江苏省如东市八仙角海上风电场的风机电组测得,该数据为100 m 高度的风速,时间分辨率为15 min。风机(121°15′00″E,32°45′00″N)测得的数据覆盖的时间段较长,因此选取该点数据验证预报风场的准确性。
2.1.2 全球预报系统预报数据(Global Forecast System forecast,简称GFS 预报数据)
GFS 是由美国国家环境预报中心(NCEP)提供的全球数值天气预报系统。该系统使用有限体积立方球动力核心和全球数据同化系统(Global Data Assimilation System,简称GDAS),通过耦合4 个单独的模式(大气模式、海洋模式、陆地/土壤模式以及海冰模式)提供大气、土壤等变量的数据。该系统每天提供4 个时次的预报,分别为0:00、6:00、12:00、18:00UTC,其预报时效为16 d(第1 天~第5 天每小时提供一次数据,第6 天~第16 天每3 h 提供一次数据)。该系统的空间分辨率为0.25°×0.25°,垂向为127 层。该数据被用作大气模式的初始条件和边界条件[54]。
2.1.3 全球预报系统再分析数据(Global Forecast System reanalysis,简称GFS 再分析数据)
我们使用GFS 再分析数据中离地面100 m 高度的风场[71]验证大气模式的输出结果。与GFS 预报数据相比,GFS 再分析数据将更多的观测数据同化进结果,同时基于观测数据对预报结果进行订正。GFS 再分析数据的水平分辨率为0.25°×0.25°和时间分辨率为6 h。为方便比较,使用双线性插值方法将GFS 再分析数据插值到与WRF 输出相同的分辨率。
2.2 自动化采集模块
预报系统从下载3 个模型的初始和边界条件所需的数据开始,直到结果的后处理和在WebGIS 中展示的完全实现自动化运行。在每天的预报流程中,首先通过Linux 的crontab 模块启动GFS 和HYCOM 数据的下载;当数据下载完成后,通过WRF、CROCO 和SWAN 模式得出连续7 d 的大气、海洋和波浪的预报数据;最后在WebGIS 系统上展示预报结果。
在WRF 模式中,首先通过预处理系统WPS 和real 模块对数据进行预处理,然后运行较粗分辨率(9 km×9 km)的WRF 模式。在本预报系统中,通过使用ndown 模块来生成较高分辨率(1 km×1 km)模式区域的初始和边界条件,并进行离线嵌套。WRF 的输出数据会被用作CROCO 和SWAN 模式所需的强迫场,这些数据也会从WRF 模式的输出中自动抓取。此外在CROCO 模式中,还会自动提取HYCOM 预报数据制作模式的初始和边界场。3 个模式运行后,所需的输出变量都会经过自动化的后处理被保存为netCDF 格式,供WebGIS 调用展示。最后在WebGIS 系统上会展示所需的各模式输出变量,用户可以选择预报日期和时间,也可以查看任一变量在任一坐标点上的时间序列。
3 模式验证与结果分析
3.1 海面风场预报模块
3.1.1 模式与同化结果
不同预报时间长度的相关系数表明,数据同化提高了短期预报的准确性。实例证明,预报时长1 d 与观测数据之间的相关性从-0.070 增加至0.586。比较RMSE 也可以发现误差从6.439 降低至3.498。3、5、7 d的预报准确度也有所提高(表1)。但较长预报时长(5 d 和7 d)的相关系数和RMSE 表明,数据同化对结果的改进并没有显著影响。数据同化的局限性之一是所使用的观测数据缺乏,同化更多类型的观测数据(如高层大气数据、卫星数据、雷达数据等)可以进一步提高较长时间的预报准确性。
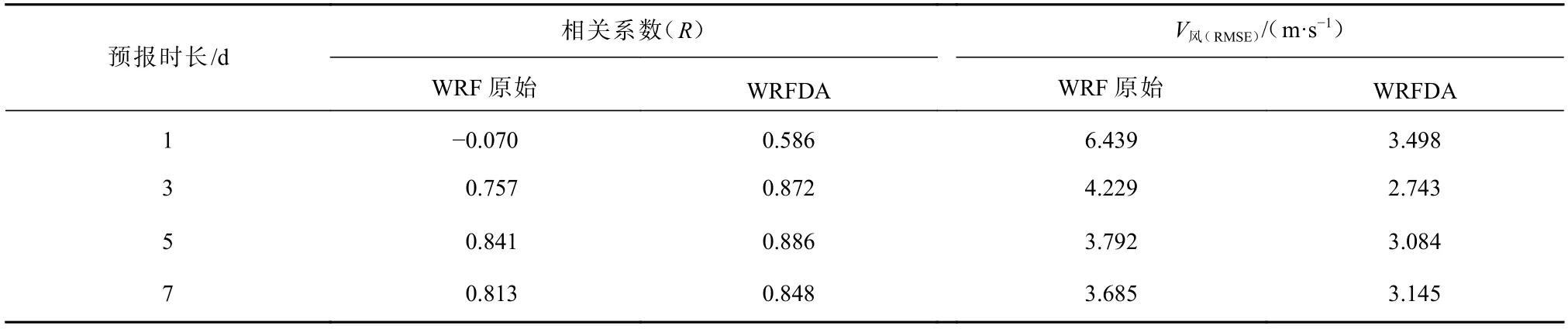
表1 WRF 模拟江苏省如东市八仙角海上风电场(121°15′00″E,32°45′00″N)100 m 高度风速的相关系数与RMSE(m·s-1)的原始和数据同化对比Table 1 Comparison of WRF-simulated 100-m wind speed correlation and RMSE(m·s-1)between the original and data assimilated data for the Baxianjiao Offshore Windfarm(121°15′00″E,32°45′00″N),Rudong City,Jiangsu Province
预报风场的空间分布与GFS 再分析数据提供的空间分布非常一致(图3)。第1 天的预报结果显示,台风在2 个产品中的位置几乎相似。输出的空间分辨率更高,预测结果呈现更多细节(尤其是在陆地上)。在第3 天预报结果中,陆地上风速略大于再分析数据。第5 天和第7 天时长的预报表明,随着预报时长的增加,预报和再分析结果的空间分布之间的差异也随之增加。例如,再分析数据中没有观察到预报数据中菲律宾东部第5 天和第7 天的台风。
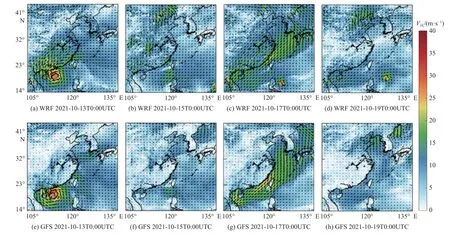
图3 100 m 高度风场WRF 和GFS 再分析数据的比较(预报输出时间:2021-10-12)Fig.3 Comparison of WRF-simulated and GFS reanalysis data 100-m wind field(forecast output time: 2021-10-12)
模式预报的准确性与预报时长有关。2020-11-16—2021-10-24 的预测准确度,随着预报时长的增加,结果的准确度随之下降(图4)。
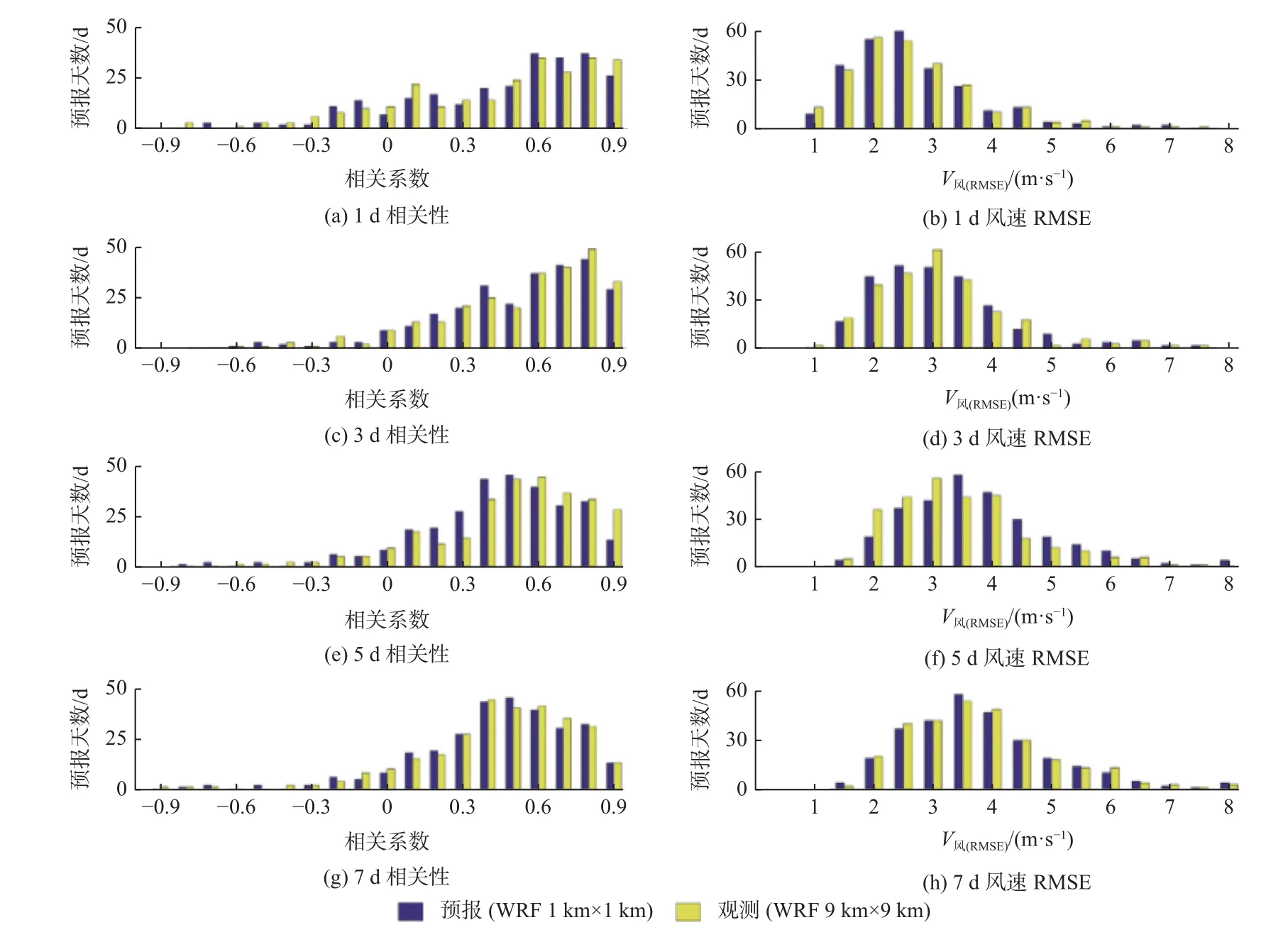
图4 2020-11-16—2021-10-24 江苏省如东市八仙角海上风电场(121°15′00″E,32°45′00″N)100 m 高度风速的观测与预报的相关系数与RMSEFig.4 100-m wind speed correlation and RMSE between observations and forecasts for the Baxianjiao Offshore Wind Farm(121°15′00″E,32°45′00″N),Rudong City,Jiangsu Province from 2020-11-16 to 2021-10-24
1 d 的预报中,大部分结果的相关系数在0.6~0.9。随着预报时长的增加,峰值天数开始转向较低的相关系数,3 d 预报的相关系数为0.6~0.8,5 d 预报的相关系数为0.5~0.6,7 d 预报的相关系数为0.4~0.6。RMSE 也展现了相似的结果。1 d 的预报结果,最大值集中在2.0~2.5 m/s。随着预报时长的增加,RMSE 也会增加,7 d 的预报结果中的最大值可以达到3.5 m/s。
3.1.2 智能预报结果
基于TCN-LightGBM 的风速智能预报订正模型在八仙角的预报效果(图5),最大的预报步长为96,时间分辨率为15 min。图5a 中两种预报模型RMSE 随预报时间步长的变化表明随着预报步长的增加,RMSE相应增加,预报时长为12 h 后误差变化不明显。同时通过对比可知,LightGBM 算法的引入可以有效地降低RMSE(图5a)。图5b 更为直观、准确地展示了LightGBM 算法的引入后RMSE 的降低率,加入LightGBM订正模块后RMSE 最大降低率约为27%(图5b)。
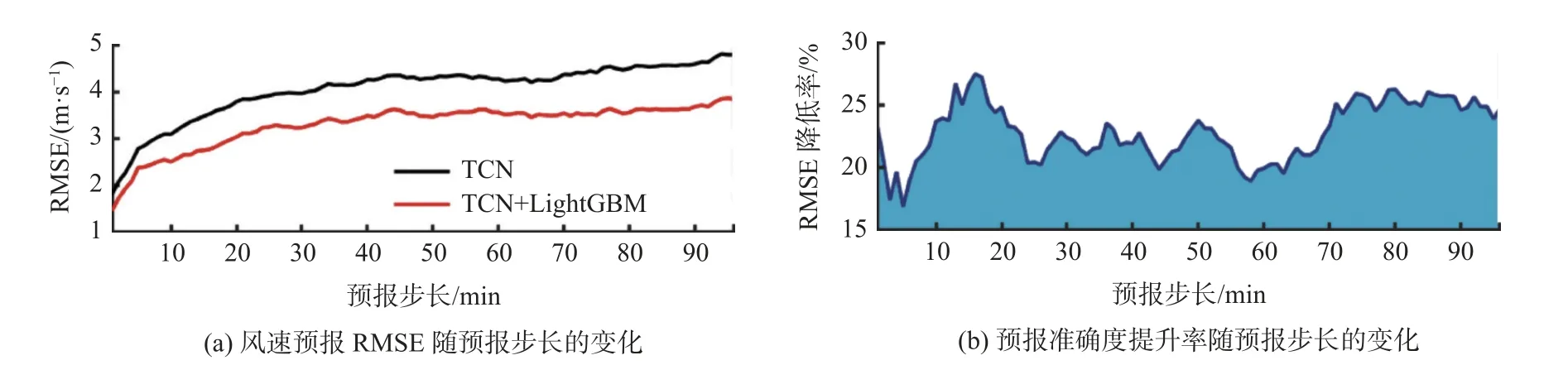
图5 江苏省如东市八仙角海上风电场测试集预报结果Fig.5 Forecast results of the Baxianjiao Offshore Wind Farm test set in Rudong City,Jiangsu Province
3.2 海流预报模块
3.2.1 模式验证
用于CROCO 模式验证的数据采用REMSS(Remote Sensing System)的SST(海表面温度)数据[72]、SMAP卫星提供的SSS(海表面盐度数据)[73]、AVISO 提供的绝对动力高度(Absolute dynamic topography,ADT)场数据[74]、GDP(Global Drifter Program)的海表流场数据[75]以及UHSLC(University of Hawaii Sea Level Center)提供的13 个验潮站水位数据[76]。其中,REMSS 使用最优插值法融合了微波以及红外测量的SST,格点SST 数据的水平分辨率为9 km。SMAP 3 级月平均数据集的空间水平分辨率为0.25°,数据时间跨度为2015 年4 月至2020 年12 月。AVISO 的网格分辨率为0.25°×0.25°,时间分辨率为1 d,时间跨度为1993 年至2020 年。ADT不能直接与海表面高度相比较,需要将其减去其时间平均,模式的SSH 同样减去其时间平均,得到的海表面高度的异常场(SSHA)具有可比性。GDP 的海表面流场由1979 年至2015 年布放在世界大洋中的大量浮标轨迹得来,其气候态月平均的流场水平分辨率为0.25°。
模式结果的东海区域季节平均SST 分布与REMSS 的季节平均SST 分布基本相同,仅存在一些局部的差异且主要集中在沿岸(图6)。春季模式结果中黑潮的高温结构相比REMSS 更加明显,苏北沿岸SST 略高于REMSS 的结果。夏季模式结果中半封闭海盆的沿岸SST 高于REMSS 结果。秋季二者的SST 分布几乎一致。冬季渤海沿岸模式结果的SST 低于REMSS 结果,黄海的暖舌结构以及黑潮高温结构也更加明显。
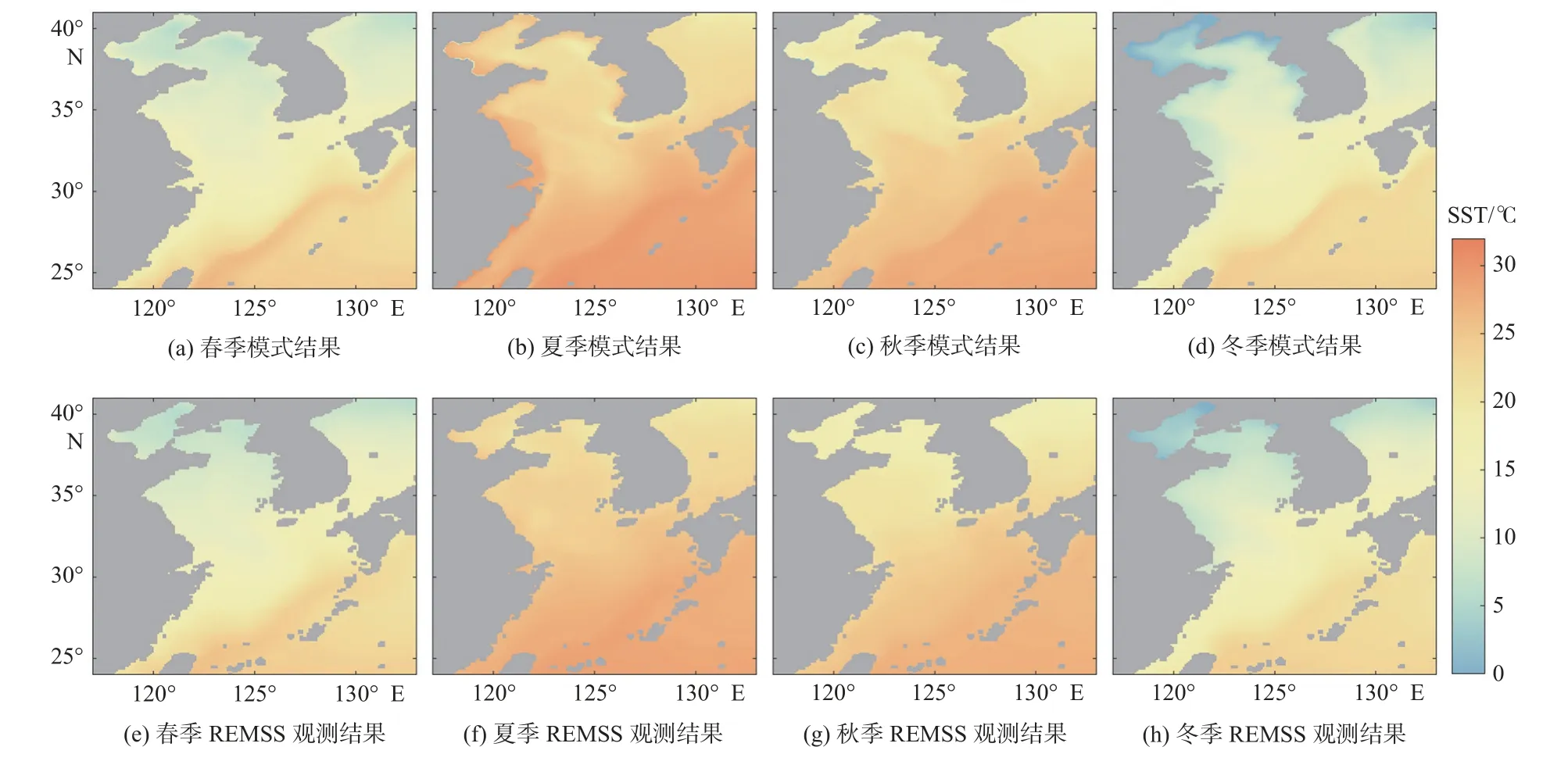
图6 模式模拟与REMSS 观测的季节平均SSTFig.6 Seasonal averages of modeled and REMSS SST
模式结果中东海区域的季节平均SSS 的分布与观测值大体相似(图7),观测数据在近岸有缺失情况,如渤海近岸。黄渤海SSS 的模式结果比SMAP 卫星的略高0.5~1.0;在东海长江冲淡水区域存在较明显的差异。夏季长江冲淡水发展最为旺盛,沿苏北沿岸北上,导致SSS 明显低于其他季节;冬季长江冲淡水的发展最弱;而春季和秋季分布形态类似。
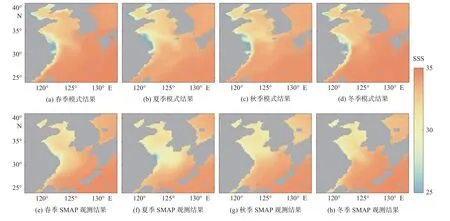
图7 模式模拟与SMAP 观测的季节平均SSSFig.7 Seasonal averages of modeled and SMAP SSS
模式得到东海区域的SSHA 分布形态与AVISO 结果基本一致(图8)。模式结果中的SSHA 在4 个季节均能体现出黑潮的流态。此外,SSHA 的渤海区域模式结果在夏季和冬季分别呈现出较大的正值和负值,高于AVISO 的结果。
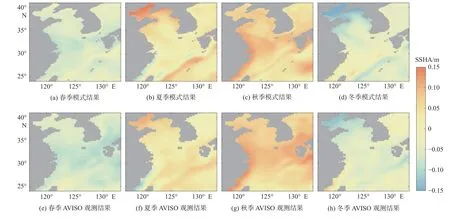
图8 模式模拟与AVISO 观测的季节平均SSHAFig.8 Seasonal averages of modeled and AVISO SSHA
模式结果中东海区域季节平均的表面环流形态大体上与GDP 结果一致(图9)。模式结果中黑潮的路径与流幅和GDP 数据中一致;流速稍大,模式模拟的黑潮主轴流速在夏季可达到1.5 m/s,冬季约为1.1 m/s。同样在夏秋季节,模式结果中对马暖流流速较强,春冬季节稍弱。由于观测资料限制,如GDP 未给出中国近岸的流场,但模式结果中能反映出长江冲淡水以及浙闽沿岸流。
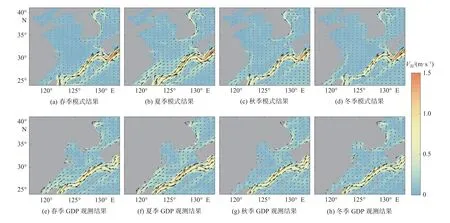
图9 模式模拟与GDP 观测的季节平均海表流场Fig.9 Seasonal averages of modeled and GDP surface current fields
选取时长为1 a 的逐小时潮位数据进行调和分析,用来计算潮位调和常数的观测值。模式模拟结果同样取时长为1 a 的逐小时SSH 数据进行调和分析,用来计算潮位调和常数。对比的分潮为4 大分潮(M2、K1、O1和S2)。图10 显示了2002 年6 月至8 月4 个验潮站(滨田站、石垣站、那霸站和奄美站)的地理位置、逐小时水位时间序列观测结果和模式结果。结果表明,模式模拟的水位时间序列与观测结果的相关性均高于0.9,且均方根误差均未超过0.12 m,即模拟的效果较好。图11 为4 大主要分潮的振幅-相位散点模式结果和观测结果图。结果表明,多数验潮站的分潮振幅均与观测振幅相近,部分验潮站的M2分潮振幅差异稍大,但均未超过10%(振幅差异/振幅)。与观测相位对比,大部分验潮站的分潮相位差异都小于15°。其中模式结果与观测结果相比,仅有2 个验潮站相位差异较大(未超过50°)。
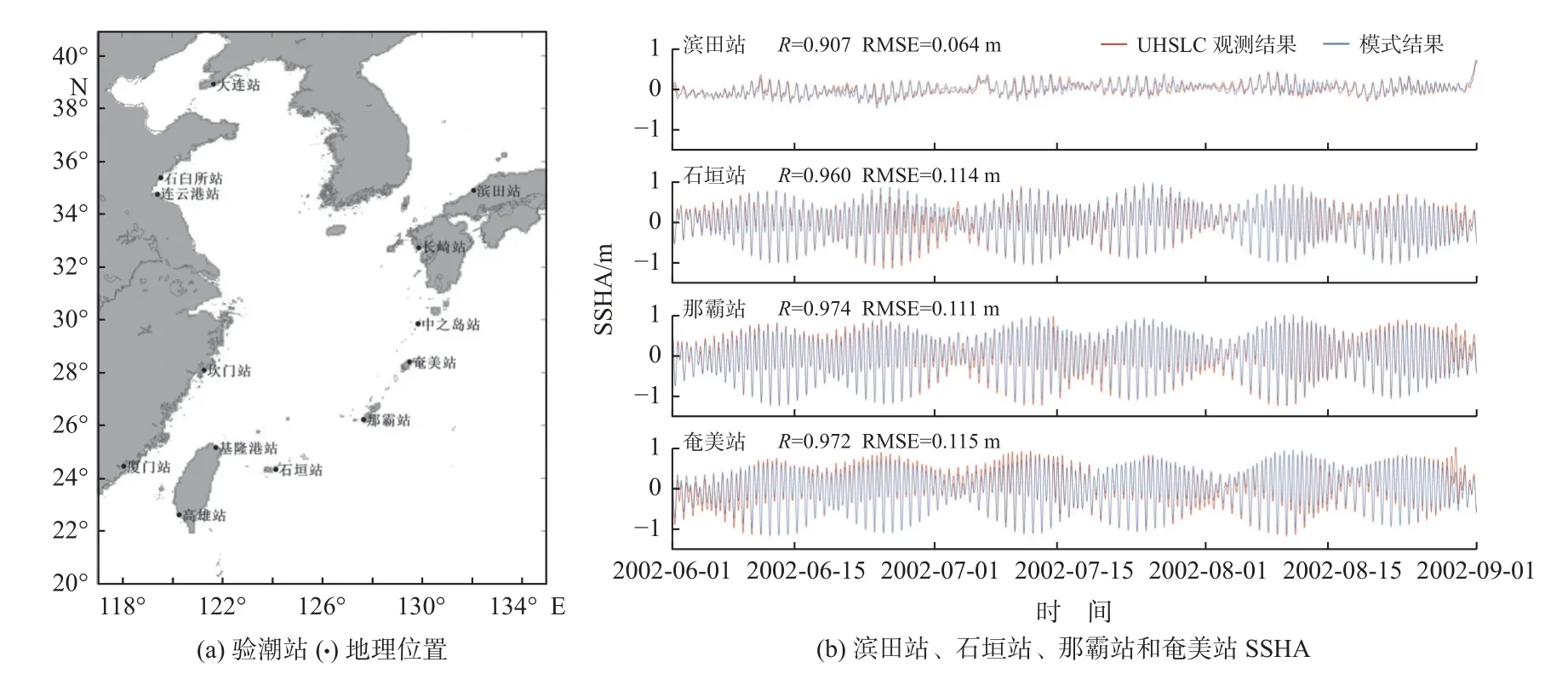
图10 2002 年6 月至8 月滨田站、石垣站、那霸站和奄美站UHSLC 观测与模式模拟的SSHA 对比Fig.10 SSHA comparison of UHSLC and model results at Hamada,Ishigaki,Naha and Naze tide stations from June to August 2002
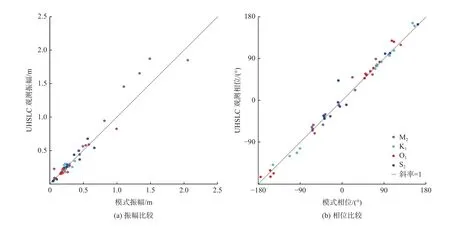
图11 13 个验潮站的模式与UHSLC 的潮汐调和分析结果散点图Fig.11 Scatter plot of the 13 tide stations tidal harmonic analysis from UHSLC and model results
3.2.2 结果分析
2021-10-12 的CROCO 日平均预报海表流场和SST 见图12。日平均流场结果显示,黄渤海半封闭海盆内的流速度较小,基本不超过0.25 m/s;而其他开阔海域的流速较大,基本都超过了0.25 m/s。在黄海有一支较明显的自北向南流,流速约为0.2 m/s,在33°N 附近与从济州岛分离出来的支流相遇。在东海存在台湾暖流、对马暖流以及黑潮这三支主要海流。秋季台湾暖流很弱,流速约为0.2 m/s。对马暖流流速可达0.4 m/s,在岛屿后方由于地形作用产生急流,流速甚至能超过0.5 m/s。黑潮基本沿陆架边缘流动,主轴流速约1 m/s。此外,黑潮南部存在许多从太平洋传入的直径上百千米的中尺度涡旋,部分涡旋边缘的流速能超过0.5 m/s。
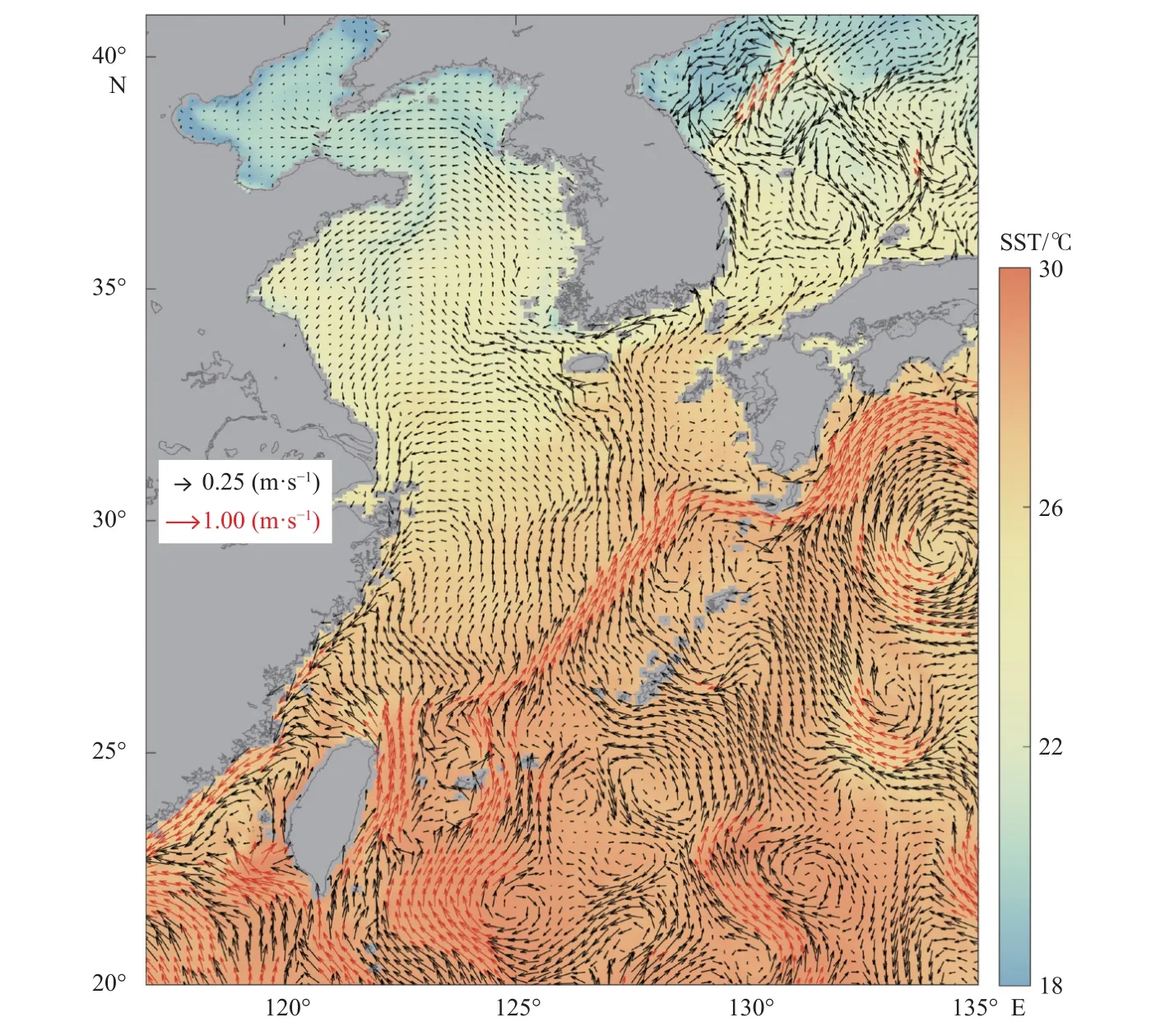
图12 2021-10-12 的CROCO 预报场日平均海表流场与SST 分布Fig.12 CROCO averaged modeled current field and SST on October 12,2021
日平均SST 基本呈现南高北低的分布,温度跨度可达8 ℃。最低温度出现在渤海沿岸地区,可达16 ℃。黄海温度约为22 ℃,应是自北向南的海流将渤海的冷水带入黄海。东海的SST 基本高于24 ℃,应是黑潮的支流将高温水带入东海以及对马海峡。此外,黑潮南部的SST 场也存在和中尺度涡相匹配的SST 结构。
3.3 海浪预报模块
3.3.1 海浪模式
海浪模式结果的评估结合了江苏近海海域的浮标、日本气象厅(Japan Meteorological Agency,简称JMA)海洋数据浮标和欧洲中期天气预报中心(European Centre for Medium-Range Weather Forecasts,简称 ECMWF)提供的波浪再分析产品。在95%置信水平下进行测试,模拟与ERA5(ECMWF reanalysis V5)中期数据[77]具有高度的正相关。JMA 的浮标22001 位于黑潮流轴(126°19′48″E,28°10′12″N)附近,该位置的水深为175 m。将观测到的有效波高数据与模拟结果进行比较,发现模式数据与浮标数据的时间序列变化趋势一致,1 月模式输出的有效波高与浮标实测的有效波高的相关系数为0.90,7 月为0.93。均方根误差在1 月为0.48 m,7 月为0.27 m,表明模拟结果很好地再现了观测到的波浪,具体的比较结果详见Wang 等2020 年的研究[51]。此外,徐瑾等[50]利用该模式模拟江苏近海的波浪与浮标观测的波浪结果相近,证明了模式模拟的高分辨率江苏近海海浪场结果是可靠的。
2022-07-01 预报的2022-07-02T0:00 的结果见图13,在南海海域受台风影响海浪场的有效波高(图13a)最大值超过8 m,分布在台风眼的右侧海域。同时台风对该海域的涌浪场影响也非常显著(图13b),最大值达到8 m,涌浪的大值区集中于风眼的右侧海域。该预报时刻的海浪周期空间分布显示,在南海海域受台风影响海浪周期值相对其他海域较大,最大值达到11.5 s,此外海浪周期在外海海域要大于近岸海域的。我们用同时刻ECMWF 提供的ERA5 再分析的海浪场结果[77]对预报模式进行验证,对比分析表明,预报的结果与再分析海浪场空间分布特征相似,在台风过境海域有效波高、涌浪浪高和波浪周期比再分析数据大,这主要受到模式的驱动风场和模式分辨率的影响。
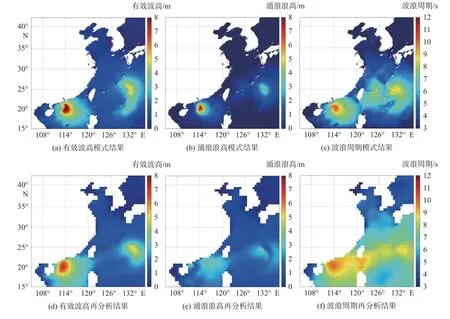
图13 预报的2022-07-02T0:00 的海浪场(预报输出时间:2022-07-01)与ERA5 再分析海浪场的对比Fig.13 Comparison of modeled wave field and ERA5 reanalysis wave field at 2022-07-02T0:00(the forecast output time: 2022-07-01)
3.3.2 海浪智能预报
除使用传统的动力驱动海洋数值模式的方法外,我们积累并开发了基于深度学习的海浪智能预报系统。在实际预报应用中,这些深度学习方法由于不需要进行差分迭代求解,仅通过调用训练好的模型即可实现端到端的智能预报,大大增加预报频率和预报的及时响应性,以及应对突发事件时对快速预报的需求。基于深度学习的海浪智能预报系统相较于传统的数值模式具有更好的可扩展性,可以通过迁移学习不断更新预报模型,更好地应对目前全球变暖背景下天气突变事件增加。
我们正拟将具备时空特征提取能力的深度学习算法,如ConvLSTM 算法[53]和基于注意力机制的卷积LSTM 网络[78],运用到海浪的有效波高预报中;将EMD(Empirical Mode Decomposition)模型[79]引入单点海浪预报模型,有效提高单点海浪有效波高预报的准确性。这些模型在针对海浪有效波高的临近或短时预报中可以媲美数值模式,并且耗费的计算资源更少。虽然在本预报系统中尚未将这些方法纳入并验证,但可以预见这些将是本系统未来进一步优化和扩展的方向之一。
4 自动可视化系统
在业务化预报过程中,每天预报系统都会产出大量的预报结果。为了能更方便直观地查看这些预报结果,我们还配套开发了自动展示系统。该系统每天自动接收预报产出的数据,并通过网页端展示。用户可以在网页端选择每天新生成的或历史预报文件,查询预报目标时刻的各种预报要素。后台服务器会根据用户的实际选取,实时绘图并展示在页面上。
4.1 关键技术
自主研发的自动展示系统基于Python 语言,由多个第三方开源工具库进行搭建,主要包括分别用于数据读取和网页构建的netCDF 和Dash。netCDF 读取模式输出的数据,通过设置输入的日期变量实现实时读取不同日期的数据,包括每日新增的和历史生成的数据。这一日期并不是直接在程序中输入,而是默认赋予了当天的日期作为变量值,通过改变网页端的日期选择框将Dash 部件的功能传入到程序中。Dash 作为构建网页应用程序的高效Python 框架,使用纯Python 实现高度自定义用户界面,并构建数据可视化应用程序。
基于这一框架,我们将应用程序部署到服务器,通过URL 实现共享。当用户通过URL 访问到该网页界面,用户的操作传递请求到服务器端,服务器根据这些请求迅速做出相应的数据选择和绘图。在服务器端使用Supervisord 进行监管,实现无人值守式地保护页面进程并每日自动更新程序。Supervisord 将自动展示系统进程作为其子进程启动,实时检测进程情况并可以在其意外崩溃时自动重新启动。另外通过配置,Supervisord 可以每日自动更新进程,使得最新的数据和日期时刻显示在页面上。
4.2 展示效果
自动展示系统的实时全景展示效果见图14~图16(分别为风速、流速和浪高)。各图左侧是该系统的导航栏,按照预报系统中的各个模式进行分类导航,用户可以在导航栏中选取想要查看的模式及模式中的预报变量。各图右侧从上往下分别是预报文件、预报目标日期、预报目标时刻(小区域的预报目标时刻可选择分钟)以及预报变量的选择。在打开页面时,页面会默认选择最新预报文件的当天8:00 的数据进行展示,中间区域的大图为大区域的预报结果,4 个小图窗分别展示的是4 个小区域的结果。可通过颜色条比对查看数据分布情况,还可将鼠标光标悬停在彩图上,光标位置会给出该点对应的经纬度和对应数据的数值。与此同时,该点未来的预报数值会被抽取形成时间序列并在界面右下侧绘制。
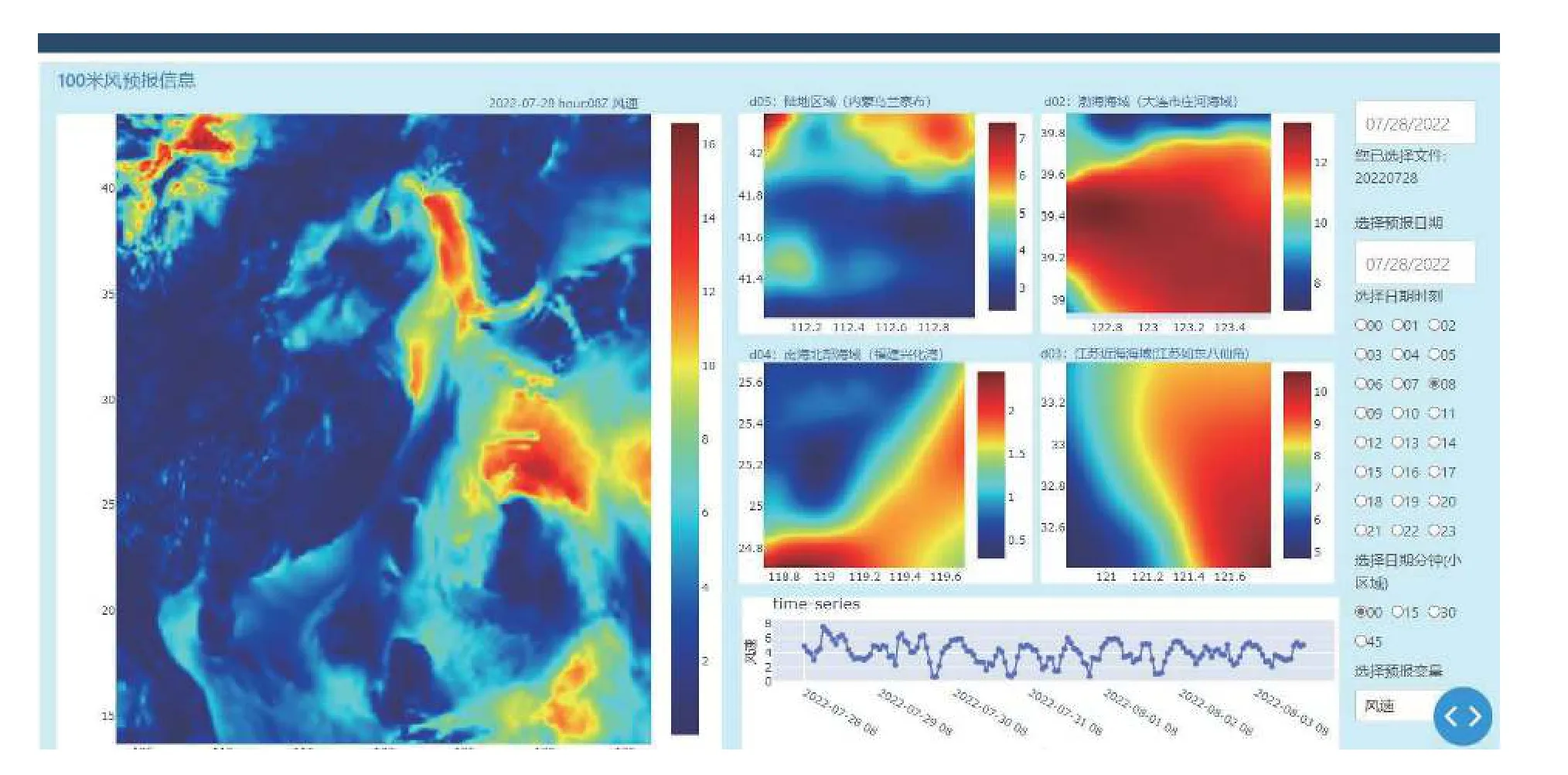
图14 风速的自动展示系统效果图(单位:m·s-1)Fig.14 Snapshot of the wind of the automated display system(unit: m·s-1)
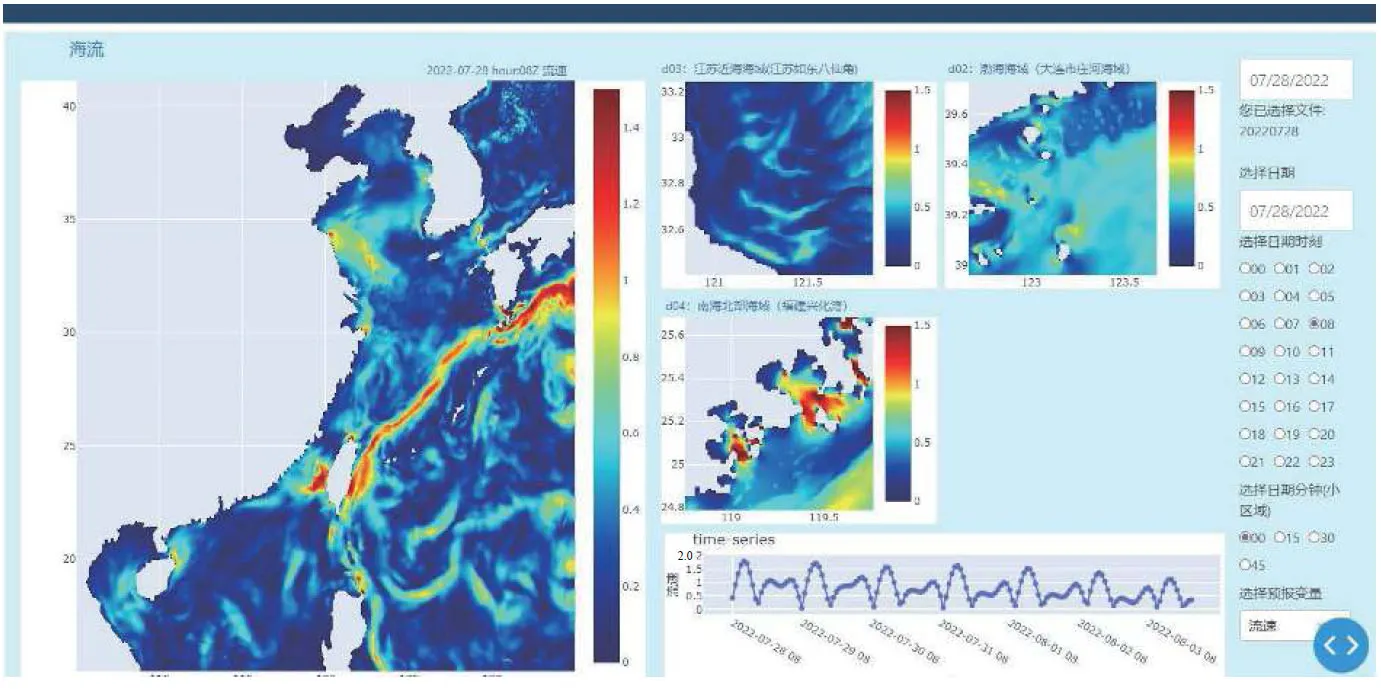
图15 流速的自动展示系统效果图(单位:m·s-1)Fig.15 Snapshot of the current speed of the automated display system(unit: m·s-1)
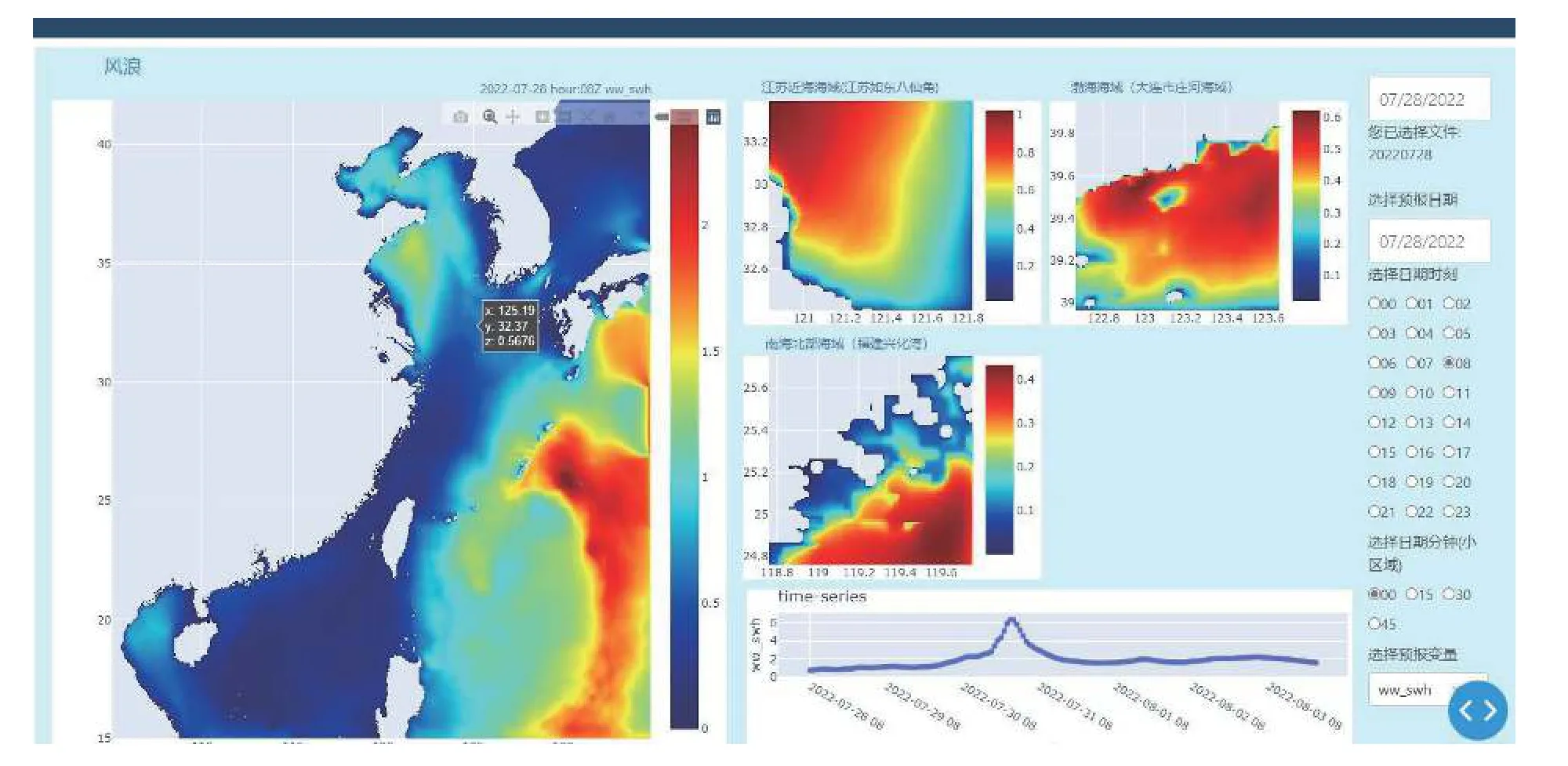
图16 浪高的自动展示系统效果图(单位:m)Fig.16 Snapshot of the wave height of the automated display system(unit: m)
5 讨论与总结
为了满足人们对中国边缘海海洋动力环境信息日益增长的需求,基于南京信息工程大学海洋数值模拟实验室的参数化研究成果,结合中尺度大气数值预报模式WRF、海浪数值预报模式SWAN、海流数值预报模式CROCO、潮汐模式NAOTIDE 进行数据交换耦合,引入同化模块和人工智能技术,建立了高分辨率的风-浪-流耦合同化精细化数值预报模式,并搭建了中国边缘海海洋动力环境可视化预报系统。海洋预报的发展离不开物理海洋理论基础、海洋3D 观测技术、海洋资料同化技术、海洋数值模拟参数化方案和计算机技术等的发展。因此海洋预报技术中许多关键性问题的进一步突破会拓展更大的发展空间。
中国近海长期且充足观测资料的缺失,使得预报系统通过同化技术和人工智能预报技术对模式预报结果的订正存在一定的偏差。本预报系统中较长预报时长(第5 天~第7 天)的相关系数和均方根误差体现了数据同化的局限性之一——观测数据的缺乏。在同化过程中加入更多类型的观测数据,可进一步提高变量初始场以及预报的准确性。
在线和离线耦合的主要区别在于,离线耦合中模式之间的数据交换不是即时的。在线耦合模式可以设置不同模式之间每隔固定时间进行数据交换,即来自不同模式的反馈/响应在整个耦合模式运行过程中都能够即时响应。而离线耦合则是利用一个模式的输出数据去驱动另一个模式。这里使用的是离线耦合模式。首先利用GFS 数据作为WRF 的初始和边界条件驱动WRF,然后利用WRF 输出的数据强迫CROCO 和SWAN。在这种情况下,模式运行期间如果没有即时将海洋和表面波浪的影响传递给大气模式(WRF),就可能会导致预报结果误差变大。
已有研究表明,区域海气耦合模式对未来气候变化的研究意义重大,主要体现为2 点:①区域海气耦合模式与全球海气耦合模式、地球系统模式共存互补;②将大区域大尺度低分辨率环流模拟结果经过动力降尺度等方法处理后得到小区域模式的输入数据,利用这些输入数据驱动小区域高分辨率的海气耦合模拟不仅能够较好地提高模拟准确度[3,12],而且能够节省计算资源。Yu 等[80]利用全球CCSM3 IPCCAR4 动力降尺度后的模式结果,驱动CROCO 模式对中国东部沿海进行了高分辨率的未来预报。然而,利用动力降尺度方法结合WRF、CROCO 和SWAN 模式对中国边缘海区的海气耦合模拟预报研究尚少,我们的风-浪-流预报系统则弥补了这一欠缺,利用动力降尺度的方法,对中国边缘海区域的大气和海洋环流进行了精细化预报模拟。整体上,关键海区高精度的预报结果例如风速与实际观测数据的相关度高,误差精度符合实际工程需求。
基于TCN-LightGBM 算法的风速预报订正模型虽然相对于单一模型,模型训练和计算的时间有所增加,但与传统的数值预报模式比较,预报速度仍有大幅提升的空间。同时基于机器学习的风速智能预报订正算法在使用中摆脱了计算资源的限制,可以迁移到普通的计算机上运行,为风速预报个性化需求计算提供了可能。
