基于无人机的灯笼挂装及卸装系统设计
2022-11-03侯鑫新
武 琳,侯鑫新
(江西经济管理干部学院,江西 南昌 330038)
0 引言
每年春节临近,城市都要“挂灯笼迎新春”,营造喜庆祥和的春节氛围,增添浓浓的年味。 但是,现阶段灯笼的挂装及卸装主要是通过汽车搭载剪叉式升降台机构,由安装人员站在升降台手动进行挂装。 这种方式存在以下弊端:(1)效率低。 剪叉式升降台每次升降均耗时久,且每个路灯都需要升降一次,完成整条街道的灯笼挂装效率非常低下。 (2)易造成交通拥堵。 城市街道车辆繁多,每次挂装都要占用一个车道,极易造成街道的拥堵。 (3)安全性更低。 安装人员高空作业有很大安全风险。 (4)维护保养困难。 剪叉式升降台属于特殊作业设备,使用率不高,但需定期维护保养,造成了一定的资金浪费。
本项目旨在研究无人机在城市街道灯笼挂装及卸装的应用,并设计研发一种利用无人机一次挂载多个灯笼升空并完成挂装的装置;同时,通过连接卸装附件,实现对灯笼的卸装。 该技术可以大大地减少相关的人力物力,对于城市美化是一项非常重要的应用。
1 无人机选型及接口
1.1 无人机选型
无人机是利用无线遥控和程序控制的不载人飞机。 近年来,无人机由于其高机动性和低成本而引起各方面的重视。 例如,在灾难救援和远程空间感知中,无人机可以比传统方法更好、更快地执行任务。
根据飞行平台构型进行分类,无人机可以分为旋翼无人机和固定翼无人机两类,且各自具有相应的优势[1]。
固定翼无人机优点有:(1)续航能力强,适合用于长途飞行;(2)比悬停的无人机更大,在部署天线阵列时更灵活,适用于MIMO 天线。 局限之处在于需要跑道辅助起飞降落,对地形的要求更为苛刻。
旋翼无人机的优点是机动、灵活,不需要跑道便可以垂直起降,能精准悬停,可对某个目标进行精细观察,体积小,操作简单易上手,应用领域广。 缺点是机动性、稳定性和效率都比较差,操控距离较近,飞行高度较低,负载较小,续航时间短,所以只能小面积作业,而且旋翼无人机上的旋转叶片运动可能导致高频多普勒反射,对通信信号造成一定影响。
由于灯笼挂装对无人机位置及精准悬停有较高的要求,结合上述两类无人机的优缺点,本文选用旋翼无人机完成灯笼的挂装工作。
1.2 无人机接口
现如今,无人机已被广泛应用于生活中的方方面面,包括航拍、高空作业、交通、通信、军事或灾难响应等领域。
本文的应用场景要求无人机有一定的负载量,且支持自主开发及外接附件。 因此,选用大疆M600 PRO无人机,负载可达6 kg。
大疆M600 PRO 是一款大轴距六旋翼大载重无人机,轴距符合中国民用航空局无人机飞行执照考试要求,无人机底部挂载接口及安装尺寸如图1 所示。
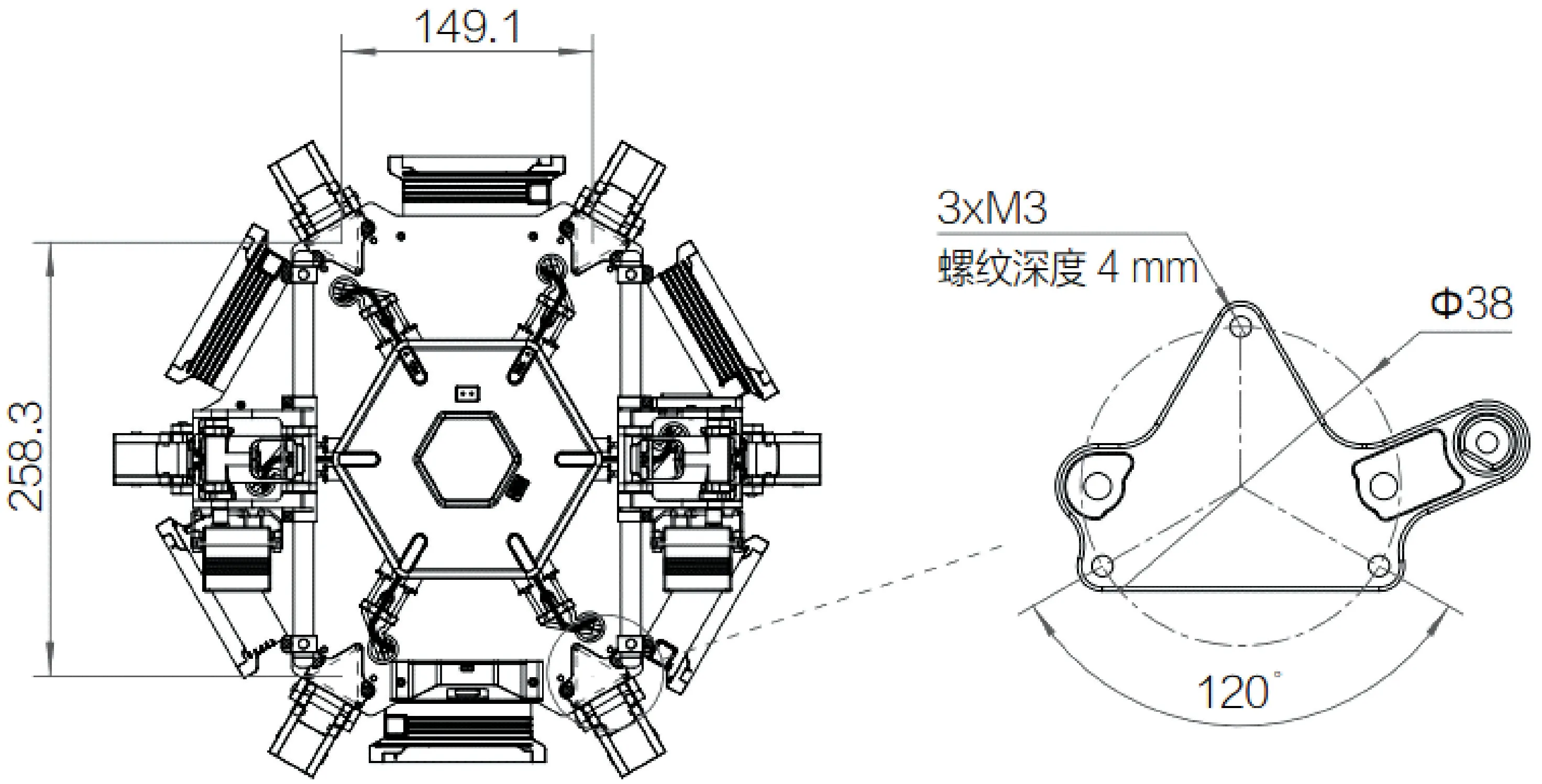
图1 无人机底部挂载安装尺寸
2 灯笼挂装及卸装装置方案设计
本文设计研发了一种可以连接无人机的无线控制灯笼挂装装置,通过同时控制无人机姿态和无线遥控挂装装置的开合,实现无人机挂装及卸装灯笼。 本项目机械单元包含灯笼挂装机架、挂装装置及卸装附件3个部分。
2.1 挂装机架
灯笼挂装机架首次通过人工的方式固连在路灯上,安装好后不需做任何操作,可长期使用。 机架两端设置对称凹槽,用于悬挂灯笼,在凹槽内部设置可绕转轴转动的金属片,上下各连接一根弹簧,一个双向卡簧,进入凹槽方向的弹簧选用弹性系数小的弹簧,使进入凹槽方向的力为小阻力,无人机可以轻松带动灯笼进入凹槽,出凹槽方向的弹簧选用弹性系数大的弹簧,使进入凹槽方向的力为大阻力,在灯笼挂装后,不会被风吹离凹槽。
2.2 挂装装置
挂装装置由连杆和直流电机组成。 连杆顶部设计螺纹,可与无人机接口匹配,并稳定固连。 通过电机作动筒的伸缩运动实现了底部灯笼挂载杆的开合运动。在挂载杆上设置多个不同深度的锯齿形沟槽,便于灯笼的挂装,同时挂载杆前端设置螺纹孔,可连接卸装附件。 机械原理如图2 所示。

图2 挂装装置机械结构
计算该挂装装置的自由度:F=3n-2Pl-Ph
该开合装置构件数n为5,Pl为7,Ph为0,因此该挂装装置的自由度为1,可以实现确定的运动。
2.3 卸装附件
卸装附件为剪刀式结构,只在卸装灯笼时安装,挂装灯笼时不安装。 通过在剪刀式结构尾部设置与螺纹孔配装的螺纹杆,实现卸装附件与挂装装置的固连;通过控制挂装装置的开合同时实现了剪刀的剪切控制。
3 灯笼挂装及卸装装置控制方案设计
电机伸缩杆由无线遥控控制,控制器分为发射单元和接收单元。 无线控制采用ZigBee 协议。
3.1 ZigBee 技术概述
近几年,人们不断探索适应工控场合的无线应用需求,形成了多种无线通信协议和产品。 最流行的短距离无线数据通信标准有蓝牙Bluetooth(IEEE802.15.4),WiFi(IEEE802.11b),Ir DA 以及极具发展潜力、已被业界认可的ZigBee(IEEE802.15.4)等。
如表1 所示几种无线标准及参数比较情况[2],结合Zigbee 的特点,可以总结出ZigBee 技术的以下4 个特点:
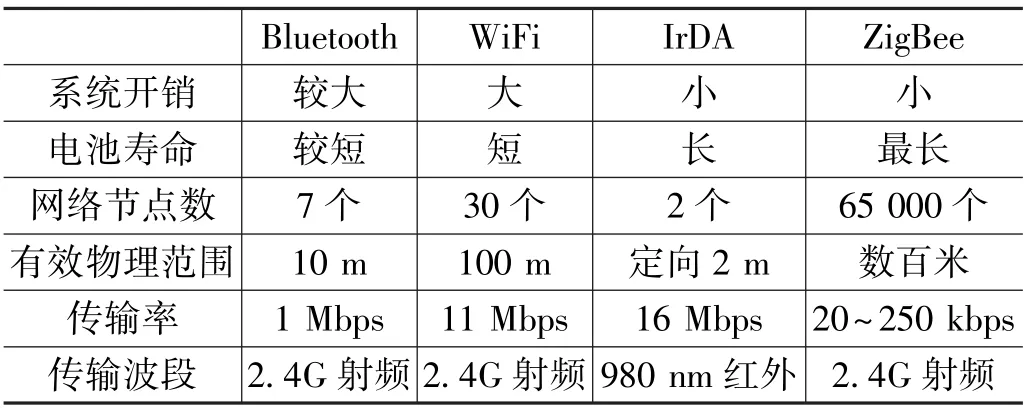
表1 无线标准及参数
(1)低功耗。 由于ZigBee 技术传输率低,发射功率仅为1 mW,ZigBee 设备仅使用2 枚普通5 号干电池,就可维持6~8 年正常工作时间。
(2)低成本。 ZigBee 协议是免专利费的,可随意使用,因此,其低成本也是受欢迎的一个重要因素。
(3)时延短。 通信时延和从休眠状态激活的时延都很短,搜索设备时延一般为30 ms,休眠到激活状态的时延为15 ms,活动设备信道接入的时延为15 ms。
(4)可靠。 ZigBee 网络采用碰撞避免策略,为避开发送数据的竞争和冲突,专门为固定带宽的通信业务预留了专用时隙。 MAC 层采用完全确认的数据传输模式,每个发送数据包都必须等待接收方的确认信息,如果传输过程中出现问题可以进行重发。
从低功耗、低成本等特点出发,采用 ZigBee 技术的无线网络控制系统非常适用于本项目的无线控制。 发射单元由无人机飞行员手持控制,在发射电路板上设置电位器,将电位器调节信号通过ZigBee 无线网络发送,接收单元安装在挂装装置上将接收的信号输出给电机,电机根据信号执行伸缩动作。
3.2 电机控制
本项目采用直线电机,挂装装置通过电机的直线运动实现灯笼挂载杆的开合。 直线电机是一类利用电磁作用直接将电能转变为电动机动子沿直线方向运动的机械能,并且这期间无需其它传动或者连接装置的电动机[3]。 直线电机初、次级产生相对运动也因气隙磁场的作用,不同的是旋转电机产生的磁场为旋转磁场,而直线电机为行波磁场,输入电能通过行波磁场转化为电磁推力,从而驱使直线电机的初级和次级产生相对运动[4]。
3.2.1 直线电机的PWM 控制
以24 V 直流电机为例,在电机两端接24 V 直流电源,电机会以满速转动,电压降至2/3 即16 V,电机以满速的2/3 转速运转。 因此,调节电机行程只需控制电机两端电压即可。
通常通过PWM 调节电机两端电压,改变单位时间内脉冲的个数实现调频,改变占空比实现调压。 占空比越大,得到的平均电压越大,幅值也越大;占空比越小,得到的平均电压越小,幅值也越小。
3.2.2 电机选型
本文选用MightZAP 系列微型直线电机(行程选用96 mm),该电机供电电压12 V,可由无人机直接供电,无须再设置供电单元,支持PWM 协议控制;电机尺寸紧凑,节省空间内置驱动电路,可用于重力方向(Z 型轴),支持多种应用程序界面及编程语言。
4 灯笼挂装及卸装系统设计
直线舵机发射端由无人机飞行员手持控制,在发射电路板上设置电位器,将电位器调节信号通过ZigBee 无线网络发送,接收单元安装在灯笼挂装装置上;接收的信号调制为PWM 信号输出给电机,电机根据接收的信号执行伸缩动作。
挂载杆上的锯齿形凹槽可使灯笼绳牢固悬挂,在无人机携带灯笼飞行过程中不易移动。 通过更改挂载杆,可使无人机携带不同数量的灯笼升空,实现挂装灯笼的效率最大化。 灯笼挂装三维示意如图3 所示。
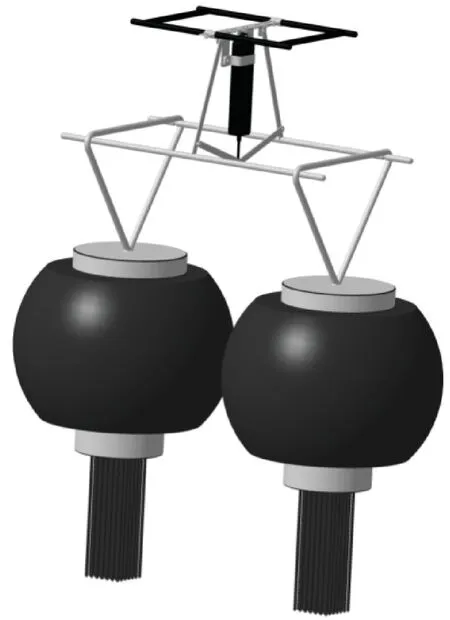
图3 灯笼挂装三维示意
无人机飞行员通过同时操控无人机的姿态和挂载杆的开合,将灯笼放置在路灯机架上,完成城市街道灯笼的挂装工作;接上卸装附件后,通过操控无人机的姿态和剪刀式结构的开合,剪断灯笼绳,完成城市街道灯笼的卸装工作。
5 结语
本文设计了一种无线控制灯笼挂装及卸装系统,无人机连接本项目设计的灯笼挂装装置升空,通过操纵无人机的飞行姿态和遥控挂装装置电机的伸缩,实现灯笼的挂放及卸装。 本设计在城市美化工程上具有非常好的应用前景,可以使城市灯笼挂装工作更加智能、便捷、高效,大大地减少了政府在该方面工作上的投入,节约了人力和财力。