空气热机平衡点的快速判定方法
2022-11-02全泓达
全泓达,盖 磊
(中国海洋大学 物理与光电工程学院,山东 青岛 266100)
热机是将热能转换为机械能的仪器.法国青年工程师卡诺从理论上对理想热机的工作原理进行研究,提出了一种理想的由2个等温及2个绝热过程的循环,称为卡诺循环,并在1824年提出了卡诺定理,为后来热力学第二定律的建立奠定了基础,为提高热机的效率指明了方向,为热力学的发展做出了杰出的贡献[1-3].
由于热机的整个装置处于动态平衡,获取精准的静态状态数据需要较长的判断时间,因此本文主要基于空气热机实验中验证卡诺定理的静态测量法,探索了快速判断平衡点的方法.
1 实验设备及原理
1.1 空气热机实验仪
实验采用世纪中科的ZKY-RJ空气热机实验仪,实验由空气热机电加热器进行加热,并由空气热机测试仪得到冷端温度、热端温度、转速、气缸压力以及气缸体积等实验数据,并经过实验通信器面板传回电脑进行数据显示.
1.2 静态测量法验证卡诺定理
热机每次循环从热源吸收的热量
(1)
其中,n为热机转速,ΔT为冷热端温差.因此热机效率η可表示为
(2)
其中,A为气体对外所做的净功,即P-V图中曲线所围面积.由于式中的变量均可以在实验中测量得到,因此通过观测不同冷热端温度时的nA/ΔT与ΔT/n的关系即可验证卡诺定理.
测量式子(2)中的参量有2种方法:静态测量法和动态测量法.静态测量法是在电压档位一定时,在系统稳定后测量得到的平均值,可以表示在一定的冷热端温度时的关系.热机稳定工作是指冷热端在一定的温度下,保持一定的效率,即在每次循环中热机对外做功近乎不变.在一定输入功率下,系统是否达到平衡取决于冷热端的温差和转速,即通过电加热器可以使冷热端温差变大(视冷端温度不变或者变化很小),而热机每次循环都将从热源吸收热量,使冷热端温差下降.所以二者的平衡即是静态测量法所需要的稳定状态.
实验中判断热机是否平衡需要长时间的数据记录,当转速、冷热端温差在一定范围内上下浮动时(例如n<1 r·s-1,ΔT<5 K),可判断空气热机达到平衡状态,但判定平衡点的观测时间通常需要10 min甚至更长,从而不利于实验教学.
2 实验设计及步骤
1)打开计算机、测试仪和通信器,加热电源;
2)将电压调至5档,预热仪器使飞轮顺利转动(一般ΔT>80 K);
3)将电压调回1档,开始计时计数,每隔1 min记录1次T1,ΔT,n和A,直至各项数值在平衡点附近变化(记录时间约1 h);
4)将电压调至2档重复上述步骤3).
3 数据处理
3.1 数据处理方法的原理
3.1.1 K型均值聚类
K型均值聚类(K-means clustering)是经典的无监督机器学习算法,用于无目标值的数据集[4].K型算法主要是通过迭代来对数据集进行分类.首先在样本中选取任意K个样本作为聚类中心,利用所选取的聚类中心计算各样本与中心间的距离;然后根据获得的最小计算距离重新划分对象.距离一般通过欧式距离Dδ进行度量,表达式如下:
Dδ(xi,xj)=
(3)
其中,xi=(xi1,xi2,…,xip)和xj=(xj1,xj2,…,xjp)表示p维欧几里德空间中的2点.重新计算获得每个样本的均值后,迭代至目标函数值不变或者小于指定阈值.目标函数为平方误差准则函数,表示为
(4)
其中,Ci为数据对象数量,ci表示第i个簇中心.
3.1.2 KNN分类
最近邻节点分类(K-nearest neighbor,KNN)方法是有监督的弱机器学习算法[5],其通过计算预测值与现有样本的闵可夫斯基距离(Minkowski distance)来确定预测所属类别.
闵式距离的表达式为:
(5)
当p→∞时,闵式距离转化为切比雪夫距离(Chebyshev distance);当p=2时,闵式距离转化为欧几里得距离;当p=1时,闵式距离转化为曼哈顿距离(Manhattan distance).通过闵式距离,可较好表示n维欧几里德空间中2点相对距离.
KNN算法中最为重要的参量为判断类别时采用的样本个数,若选取的样本数量过小,容易受到异常点的影响;若选取的样本数量过大,就会受到样本均衡的影响,所以选取合适的样本数对KNN模型具有重要作用.
本文对实验数据进行KNN分类处理,以获得能较好判断热机是否到达平衡的模型,通过该模型能准确快速地判断空气热机是否达到平衡,从而减少实验时间.
3.2 实验数据处理
为使实验结果具有普适性,消除仪器和档位(加热电压)的偶然性,本文对2台仪器3个档位进行实验,部分原始数据如表1所示.
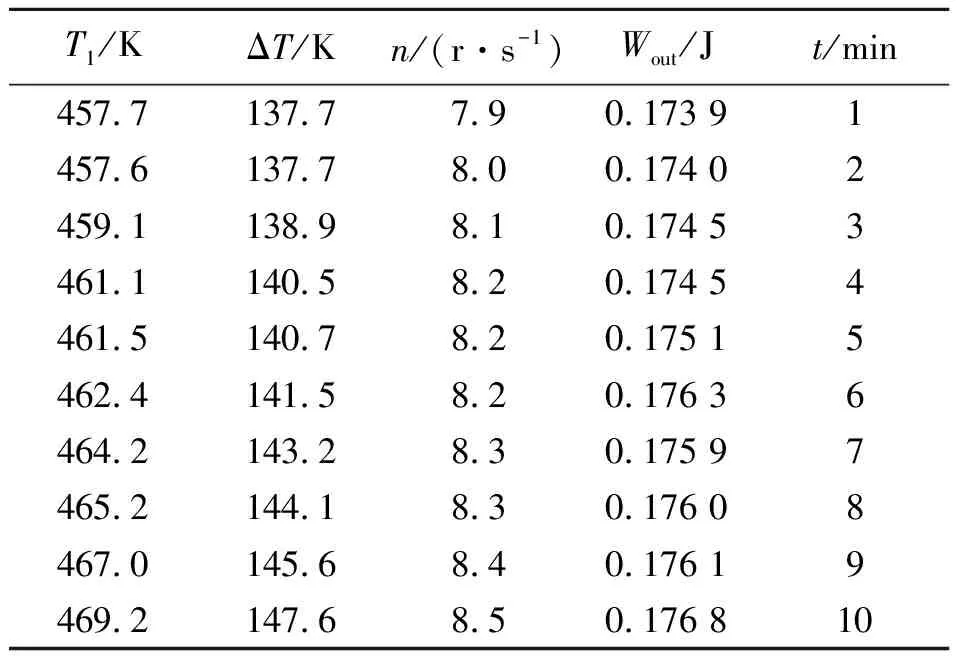
表1 实验原始数据(部分)
由于各项指标的数据单位以及数值大小不同,所以需要对各类数据进行标准化.假设进行分析的指标变量有m个,分别为z1,z2,…,zm,共有n个评价对象,第i个评价对象的第j个指标的取值为aij[6].将各指标值转化为标准化值有
(6)

由式(6)可获得各项指标标准化后随时间的变化图线,如图1所示.根据卡诺定理,热机在稳定运行时,其在1个循环内的效率仅跟冷热端温度有关,而在多次循环中,转速与循环次数有关,那么是否平衡也与转速有关.以下将不考虑对外做功对平衡判断的影响.需要补充说明的是,为了获取仅与上述因素有关的热机平衡判定方法,而非对比仪器间差异,所以无需控制仪器A和B都在电压档1和2进行实验测量.

(a)仪器A电压档1
利用得到的标准化数据,进行K型聚类[7],将欧几里德距离作为K型聚类的判断标准,将数据分为平衡状态与非平衡状态,由此可以获得较为客观公正的平衡点,图2为聚类后的轮廓图.
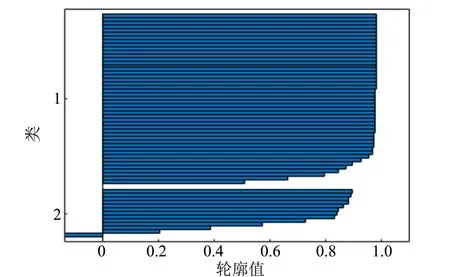
(a)仪器A电压档1
图2中簇1为聚类后认定的平衡状态,簇2为聚类后认定的非平衡状态.通过对轮廓图的分析,可以发现聚类效果较为显著.为了让实验数据更具有信服力,本次实验记录了长时间(远超热机平衡所需时间)的实验数据,所以有大量的平衡状态数据点,而该类型的点能很好地被聚集在一起,形成较为明显的数据边际,说明平衡与非平衡之间存在一定的衡量指标.
然后利用KNN进行分类,将所有数据进行整合,并将加热电压值作为模型建立的特征值.图3和图4为模型的训练结果.
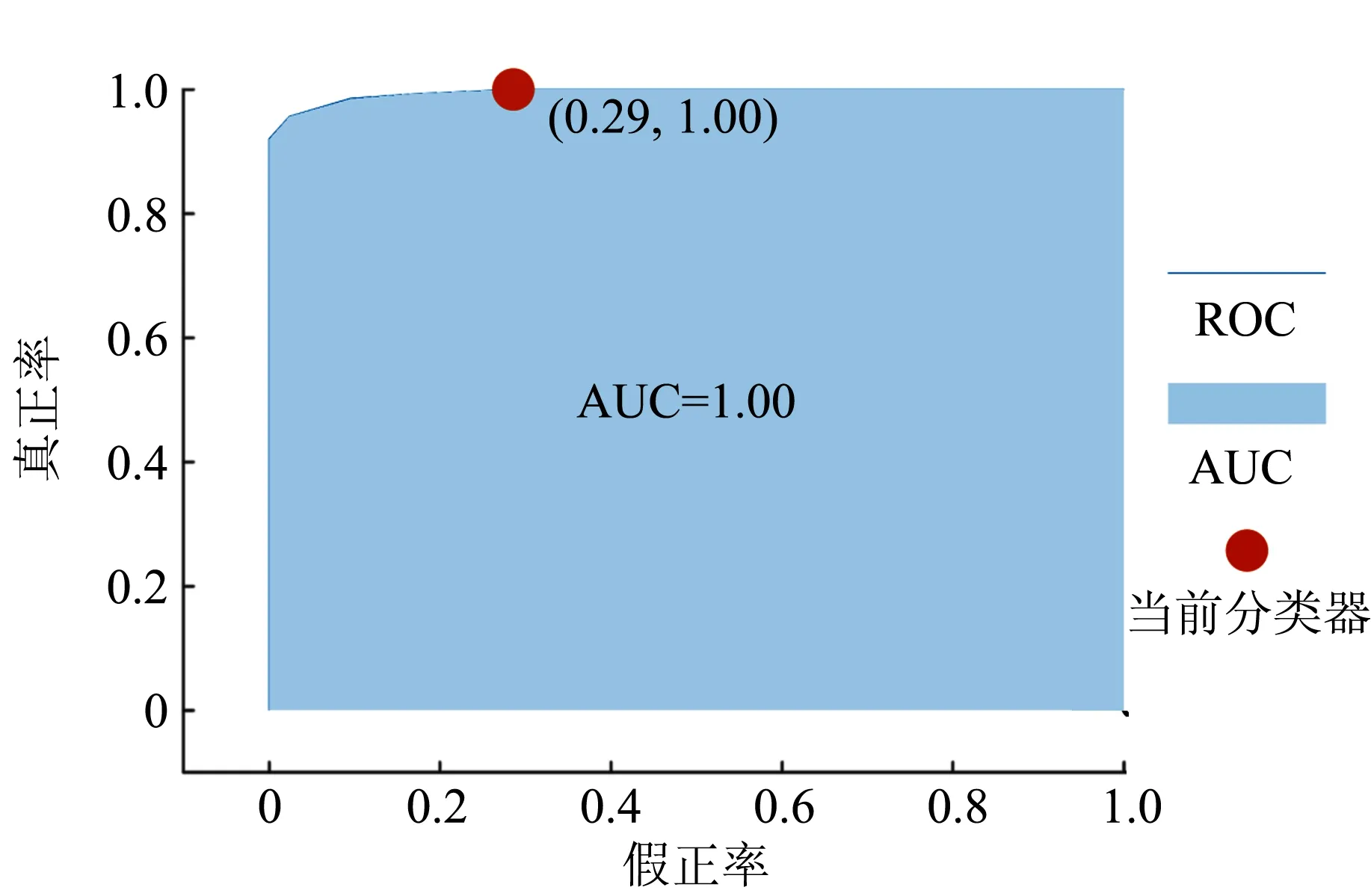
图3 模型ROC曲线与AUC
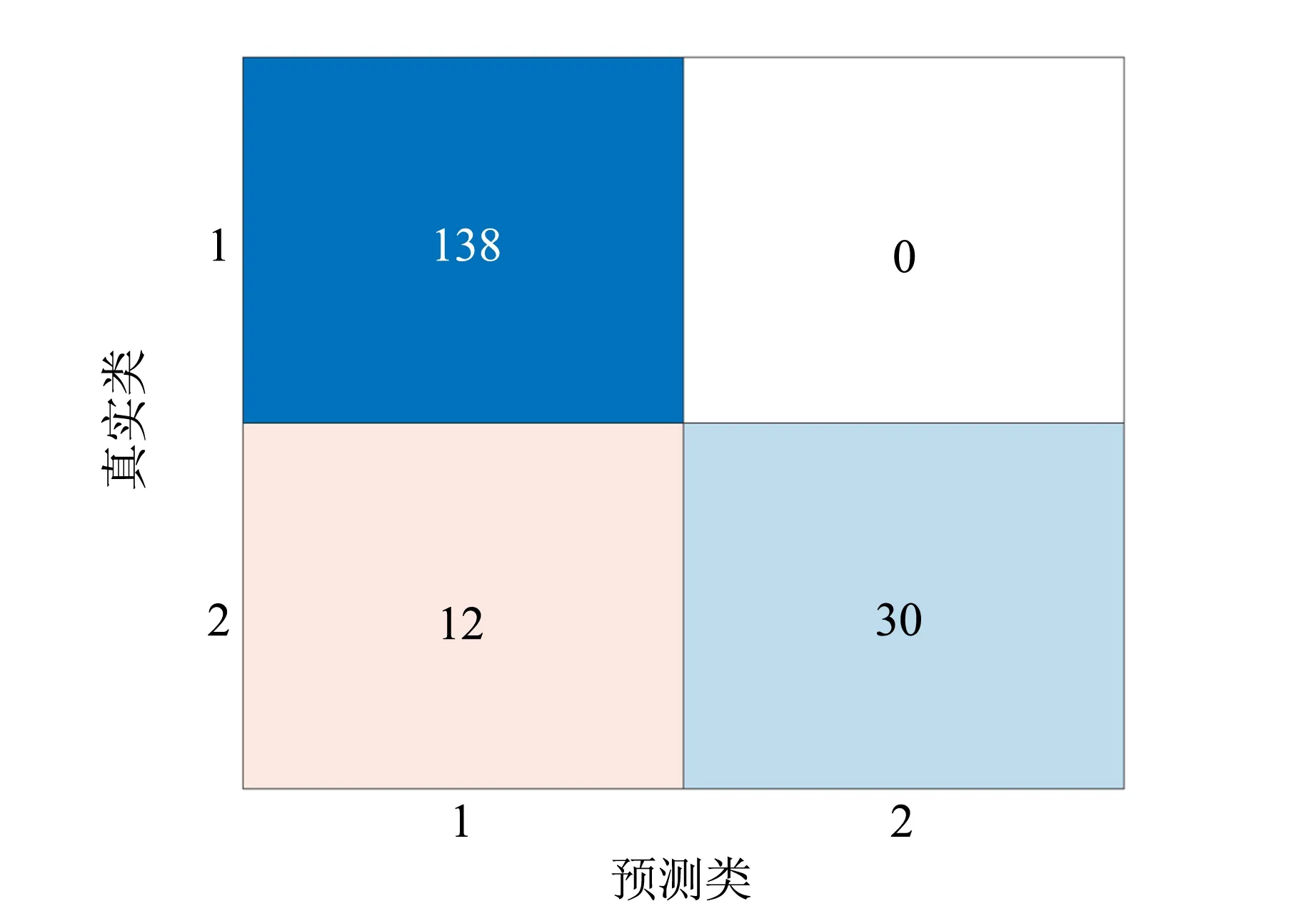
图4 模型混淆矩阵
整体利用5折交叉验证获得的模型准确率达到93.3%,且为了防止过拟合,预留部分数据进行验证,最后效果较好,基本满足预期需求.
图3为模型的ROC曲线(Receiver operating characteristic),其中AUC[8](Area under curve)接近1,远在超假正率(False positive rate,FPR)等于真正率(True Positive Rate,TPR)的直线上方,接近1个完美的分类器.
图4为模型的混淆矩阵[9],从矩阵可以看出误判断数量较少,整体能比较好地对平衡与非平衡状态进行分类.
基于以上模型,再次进行5组实验,在不同仪器不同电压档位下各测量60个数据,并将得到的数据放入模型预测系统是否处于平衡状态.为了避免仪器因转速过高而触发保护机制,将最高电压档位设定为4档.
图5是模型对于系统是否达到平衡状态判断,横坐标表示仪器和电压档位,上下阈值为K-means聚类算法得出的平衡点的最大值和最小值,模型所判断出的平衡点落在该范围越多说明模型判定准确性越好.可以看出,模型判断的平衡点基本都集中在平衡范围内.
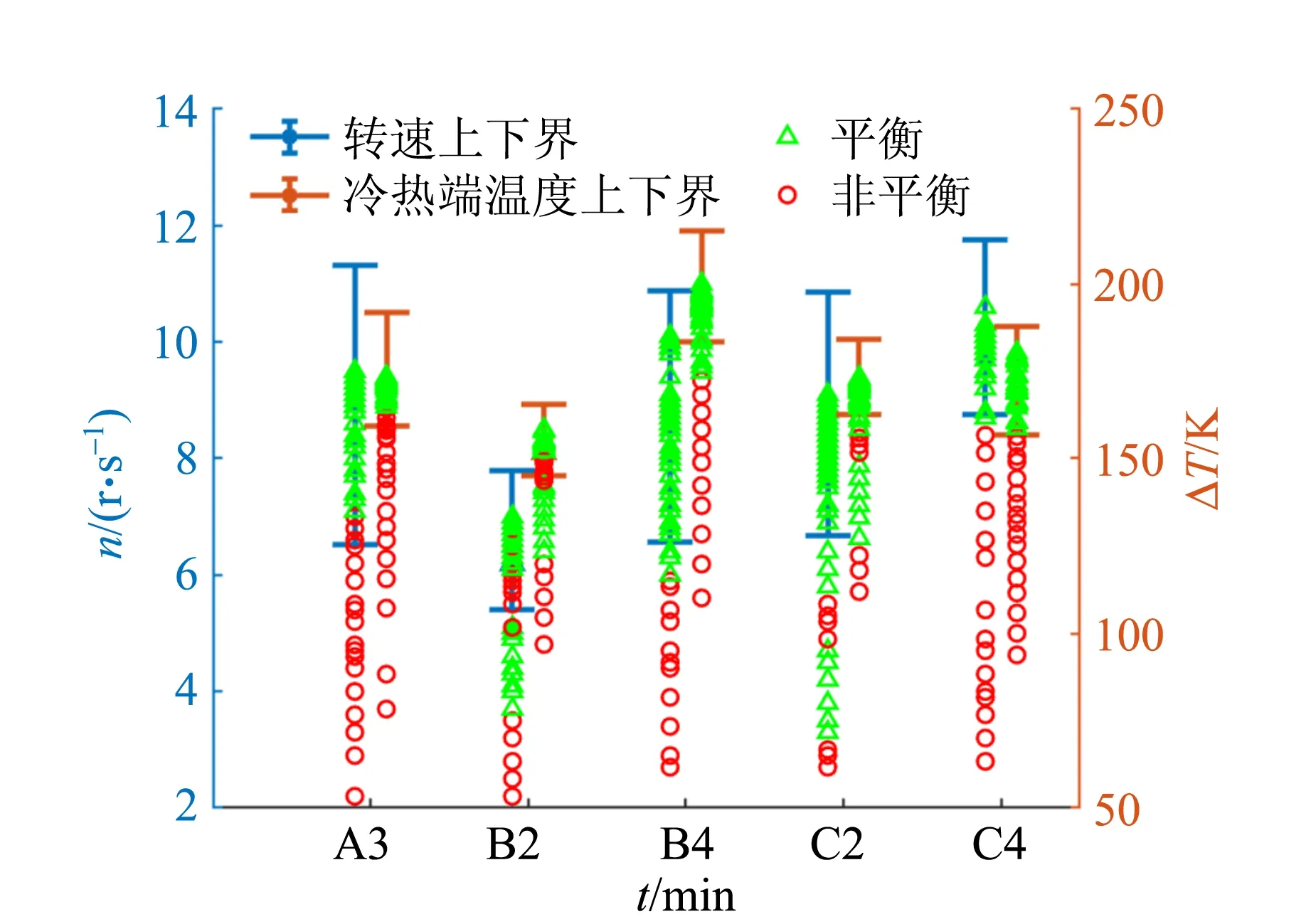
图5 不同仪器、不同电压档位下系统平衡状态的判断结果
图6为C仪器在电压档为4时的转速随时间的判断结果,可看出系统在平衡状态与非平衡状态间的转换位置处于曲线拐点,与真实进入平衡点时间不超过2 min,说明该模型判断效果较好.
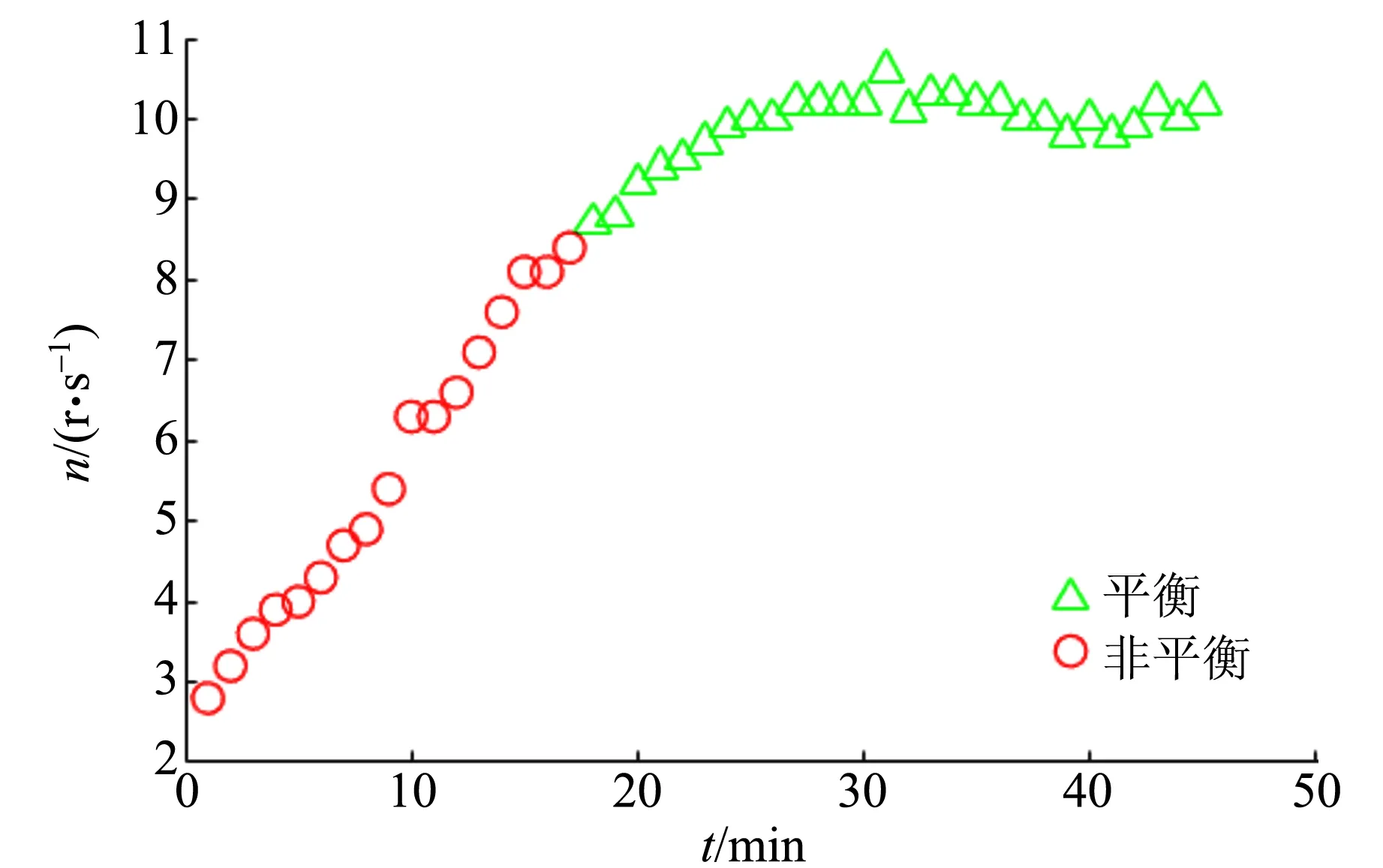
图6 C仪器在电压档为4时转速随时间的判断结果
4 结束语
本文通过对空气热机实验测得的数据进行分析,获得了基于KNN的模型分类器,通过多种指标对模型进行衡量分类都有较好的预测结果.其中,误分类点处于平衡状态与非平衡状态的模糊界线处,从错误预测进入正确预测所需时间不大于2 min,因此误分类相较于接近10 min的主观判断有了大幅度的提升,并具备一定的实用性.将每一时刻获得的数据输入该模型,能得到较好的预测结果.另外,通过K-means聚类算法可以对因测量精度、环境影响、仪器误差、动态平衡等因素带来的数据波动提供较好的参考中心值,从而使得真实值的选取更加准确.
