碰撞风险评估中的空间环境激励图方法
2022-11-02石盛玮罗冰显刘舒莳刘四清龚建村钟秋珍
刘 卫,石盛玮,罗冰显,刘舒莳,刘四清,龚建村,钟秋珍
(1. 中国科学院 国家空间科学中心,北京 100190;2. 北京跟踪与通信技术研究所; 3. 北京航天飞行控制中心:北京 100094;4. 中国科学院 微小卫星创新研究院,上海 201210; 5. 中国科学院大学,北京 100049)
0 引言
随着以SpaceX 星链卫星为代表的商业航天巨型星座的发展,人类航天已进入主体和目的更加多元、环境因素更加复杂的空间2.0 时代。2021 年全球规划的商业卫星星座超过251 项,而2017 年仅为60 项。2024 年仅商业星座卫星的在轨数量预计就将超过8000 颗。1978 年美国学者凯瑟勒等研究发现,当空间物体密度超过一定限度时将发生碰撞级联效应,称为凯瑟勒效应。Boley 等研究发现,巨型星座将带来包括碰撞风险在内的诸多负面效应。据2022 年3 月美国空间监视网(space surveillance network, SSN)数据,SSN 探测跟踪的在轨空间目标总数量已达到43 800 个,包含稳定编目管理目标25 600 个,研究分析目标18 200 个。稳定编目管理目标中,约5400 个为活动卫星,20 200 个为空间碎片。空间物体数量的快速增长,给包含轨道相关事务在内的航天活动带来巨大风险和挑战。
航天器轨道相关事务是指航天任务中的轨道预报、设计等,包括航天器的空间碎片碰撞风险评估、陨落再入时间和地点预报、轨道寿命估计和推进剂预算等工作。20 世纪80 年代,为保障航天飞机在轨安全,美国航空航天局(NASA)根据轨道预报误差特性,提出碰撞风险评估的盒子方法。此外,鉴于碰撞概率是评估碰撞风险的重要参数, Foster等最初于1992 年提出空间物体间碰撞概率的计算方法。但当交会空间物体的位置预报不确定性很高时,将影响碰撞概率计算的准确性,因此碰撞预警工作中需要增加碰撞风险评估分析机制。
随着轨道理论和模型的发展,目前以热层大气密度预测为主要内容的气动力计算已成为低轨道航天器轨道预报、确定的最大误差源。为此,研究人员在热层大气模型构建、修正领域开展了大量工作,基于新理论或原有基础改进等维度提出碰撞风险评估方法。Frigm 等给出综合交会距离和碰撞概率等信息的F 值。Coppola 等考虑速度不确定因素,给出三维空间碰撞概率的分析计算方法。Karatunov 等给出考虑了交会目标形状和姿态的碰撞概率计算数值方法。碰撞概率的计算均是在给定空间物体状态向量和误差协方差矩阵的情况下进行的,而状态向量和误差协方差均受空间环境变化影响,因此概率计算方法的改进虽有助于风险评估准确性的提升,但依然无法彻底解决碰撞概率置信度低的问题。
工程实践中,面临着航天器碰撞风险、危险目标再入时间/地点等轨道相关事务中评估的不确定性难以量化描述的问题。航天器碰撞风险评估的不准确会导致虚警或漏警:虚警会引发不必要的避碰工作,既浪费航天器有限的燃料又影响卫星正常任务的开展;漏警则会使航天器或航天员面临高碰撞危险。盒子方法和碰撞概率方法是当前空间物体碰撞风险描述中常用的2 种方法,它们各有优劣,但均是在空间物体面积质量比、阻力系数和空间环境预报准确的假定下,给出碰撞的可能性和是否进入盒子。而实际的预警工作中,上述假定并不成立,尤其在空间环境扰动期间,空间环境难以准确预报,进而引出了不确定条件下如何预估碰撞概率的问题。类似问题同样存在于危险空间物体陨落预报中。
本文为提高航天器碰撞风险评估置信度,试图合理简化气动力误差模型,量化计算轨道预报相关事务的边界;提出空间环境激励图和3区的概念,并给出具体实施方法以及碰撞预警、陨落预报计算示例,以期为有关航天工程实践和决策提供参考。
1 空间环境激励图
本文借鉴电路和信号系统中的激励、响应概念,以气动力计算中的空间环境驱动参数、阻力系数和面积质量比等输入参数为激励,黑盒测试确定轨道预报相关事务系统输出的边界,定义为空间环境激励图方法。原则上,空间环境激励范围包含航天器气动力变化的极限情况。空间环境变化对航天器碰撞预警结果的影响是一个较长的链条,其影响机制为:空间环境变化引起轨道大气密度的变化,进而改变航天器和交会碎片所遭受的气动阻力,阻力变化将直接影响两交会目标的最近距离和对应的时刻,最终影响碰撞概率的计算结果,如图1 所示。
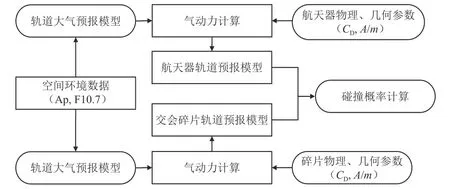
图1 空间环境对航天器碰撞预警结果的影响链条Fig. 1 Impact chain of space environment on collision warning risk
本文根据对阻力系数、面积质量比和空间环境模型误差的掌握程度,进一步细化框定气动力所致的评估结果的变化区域,称之为3区。改变轨道预报模型中的气动阻力方程中的任一参数都会影响气动力计算结果,因此合理简化气动力误差模型是量化计算轨道预报相关事务边界的基础。对空间环境指数预报水平进行统计,精准掌握预报水平是在空间环境激励图中进一步框定3区的前提条件。
1.1 激励图绘制
识别和预防在轨空间物体之间可能的碰撞,是空间交通管理的一项重要工作。本节以航天器的空间碎片碰撞风险评估为例,进行空间环境激励图技术方案描述。对于空间物体陨落再入时间/地点预报和轨道设计等航天器轨道相关事务,空间环境激励图运用的方法思路是一致的。
评估气动力相关模型误差如何改变交会事件碰撞概率问题,可通过双向调节主/副交会目标气动力,网格化计算对应的碰撞概率,并以主航天器气动力调节系数为横轴,交会目标气动力调节系数为纵轴,绘制空间环境激励图,观察碰撞概率的变化。双向调节过程中,恒存在一个交会点;在整个定义域内,可观察出计算结果的极值区和变化趋势。激励图绘制的具体步骤如下:
1)整理空间碎片预警任务中航天器和背景空间碎片的轨道和空间环境数据集。
2)进行常规的空间碎片预警计算,以碰撞距离(如10 km)为判据,筛选出近距离交会空间目标列表。
3)轨道大气密度和弹道系数在阻力方程中相乘耦合,气动阻力的计算式为

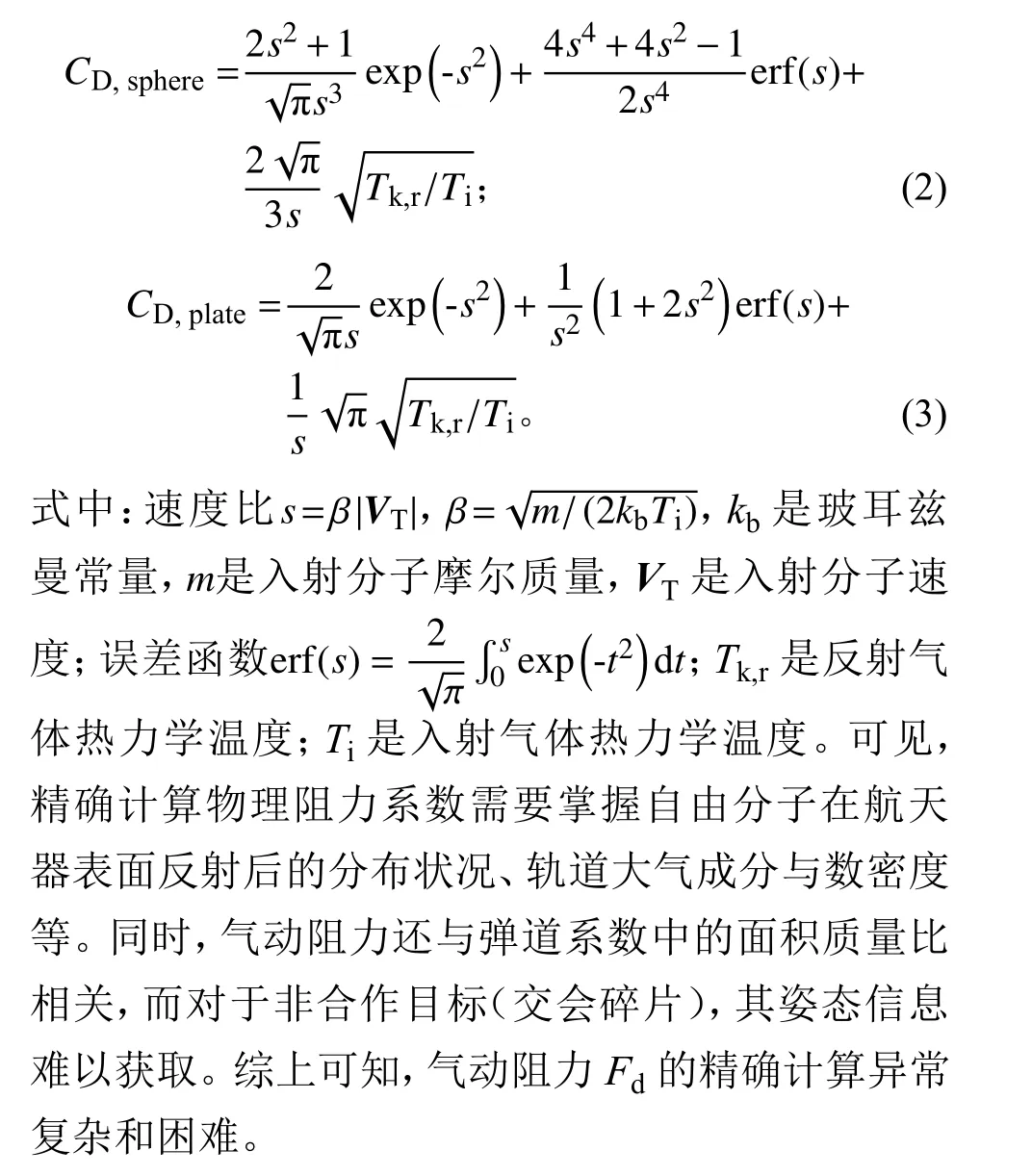
式中:为轨道大气密度;=/为弹道系数,、分别为航天器迎风面面积和航天器质量,为阻力系数;为目标相对大气速度。物理阻力系数是通过计算自由分子流粒子与航天器表面的能量和动量交换(称为气体表面相互作用)来确定的。Sentman 等给出的适用于各种形状的阻力系数公式比较复杂,其中球形和平板构形物体的阻力系数和可以分别解析表示为:
可以通过气动调节系数,双向调节主/副交会目标气动力,网格化计算对应的碰撞概率。调节系数的取值范围以其上下限调节后充分覆盖可能的变化区间的极限为原则。以主航天器气动力调节系数为横轴,交会目标气动力调节系数为纵轴,绘制空间碎片碰撞风险的空间环境激励图;然后根据激励图中当前空间环境下碰撞概率值及扰动环境下的变化趋势,判断交会事件风险水平。
4)根据空间环境预报的上下限,计算框定3区(框定方法将在1.2 节详述)。
5)对步骤2)中筛选出的所有目标分别使用步骤3)和步骤4)的方法,绘制空间碎片碰撞风险的空间环境激励图、框定3区。
6)对步骤5)所得激励图集进行分类,依据如下:
①若当前碰撞概率值处于极大值区,则任何大气阻力模型误差(包括空间环境扰动所致的)均使碰撞概率变小。那么,若此时的值低于需要采取规避措施的阈值,则无论空间环境如何扰动,主航天器都是安全、无碰撞风险的。
②若调节系数的变化很大,而值的变化很小,则表明交会事件对空间天气不敏感,不受太阳风暴发展等的影响。
③若值随调节系数的变化巨大,且3区超出设定的避碰阈值,则需启动碰撞规避应急预案。
7)将步骤6)的分类结果进行整理,供工程部门决策使用。
在空间目标陨落再入、轨道寿命估计和燃料预算等轨道相关事务中,均可参照上述步骤给出相应场景下的空间环境激励图。
1.2 3σ 区框定
1.1 节的分析已说明,空间环境激励图中包含气动力建模中所有可能的误差源及边界。实际工作中,某些情况下已掌握空间物体的面积质量比和阻力系数等参量,可针对空间环境预报,细化框定因空间环境预测引起的碰撞概率变化,这就是3区的框定工作。
对于热层大气模型中广泛使用的地磁指数Kp和Ap,目前有多种先进的预测模型,包括经验函数、基于物理的模型和神经网络方法,可以给出地磁指数预测,但不提供与预测相关的不确定性估计。在空间环境参数预测水平方面已有相关研究,如Chakraborty 等使用深度高斯过程回归模型来预测不确定性边界。空间环境预报中心给出的F10.7 和Ap 指数提前3 天预报的标准偏差和分别是11 和4.2。对没有给出置信区间的空间环境指数预报,可简单利用热层大气模型所使用的空间环境指数3 倍标准差,将指数预报置信度控制在99.73%。例如,使用空间环境预报中心的预报值结合该网站的预报标准偏差和的4 种组合,即
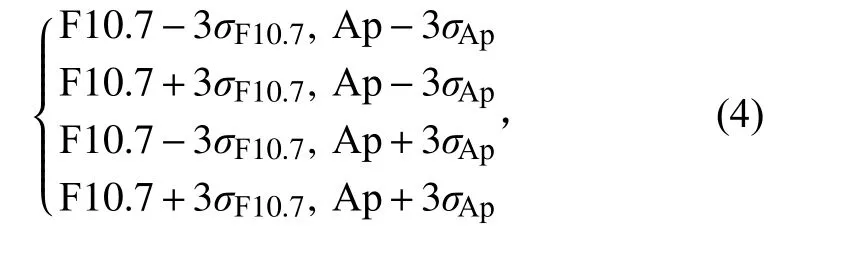
作为大气模型驱动数据,绘制交会评估结果的4 条边界,即可框定交会风险的3区。
2 空间碎片碰撞预警中的应用示例
针对常规预警任务,基于SSN 发布的双行根数(TLE)数据,计算识别到的交会风险目标如表1所示,按照第1 章所述方法对表1 所列的2 次近距离交会事件进行空间环境激励图分析。

表1 近距离交会目标信息表Table 1 Information of close-range targets
对清华科学卫星(编号46026)和与之交会的宇宙1408 碎片(编号49863)进行气动力双向调节(调节系数的取值范围是10~10,下同),气动阻力的变化幅度为0.251 2~3.981 1。计算对应的碰撞概率变化,绘制空间环境激励图(图2);在确定面积质量比和阻力系数后,细化框定因空间环境预测引起的碰撞概率变化,即3区(图2 中的虚线方框)。由图2 可见,该交会事件的碰撞概率在8×10~1.5×10范围内变化,3区对应的碰撞概率变化区间是1.2×10~1.3×10。也就是说,无论空间环境如何变化此次近距离交会事件的碰撞概率总大于1.0×10。因SSN 发布数据对应的预报模型使用SGP4 分析方法,数据中用表达阻力摄动效应;而本文研究过程中在气动力调节后使用的是数值预报方法,因未精确掌握空间物体的弹道系数信息,获取的零气动调节处的碰撞概率为1.25×10,与表1 中的2.44×10存在差异。对“遥感27 号”卫星的碰撞预警中存在同样的问题,此现象也证明SSN 的TLE 数据用于近距离交会事件筛选是没有问题的,但仅靠TLE 数据进行碰撞预警决策是远不够的。
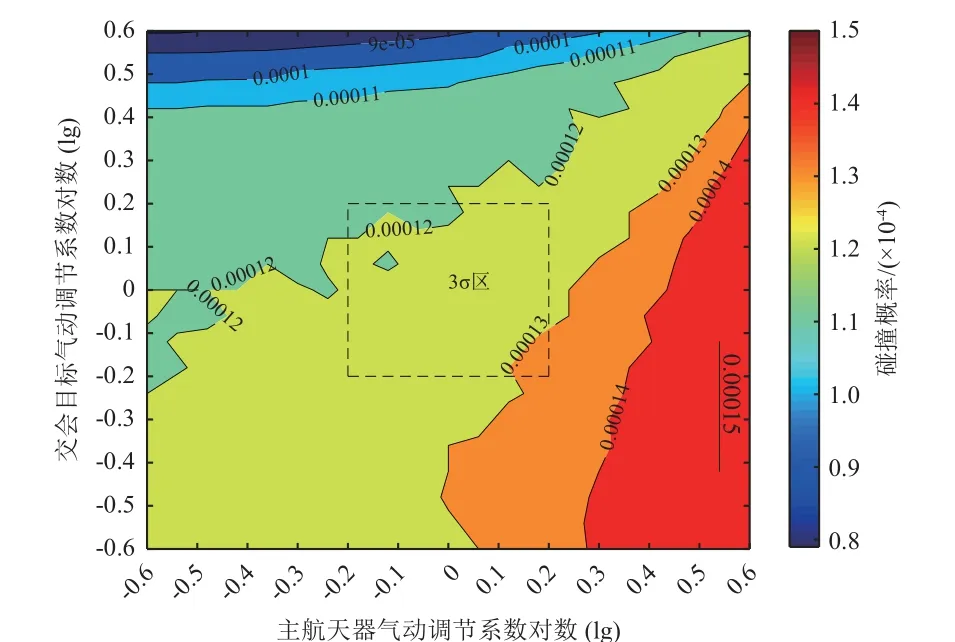
图2 目标46026 与49863 碰撞预警中的空间环境激励图Fig. 2 Space environment excitation diagram for collision warning of objects 46026 and 49863
对“遥感27 号”卫星(编号40878)和与之交会的SL-8 火箭残骸(编号05615)进行气动力双向调节,气动阻力的变化幅度为0.251 2~3.981 1。计算对应的碰撞概率变化,绘制空间环境激励图(图3);同样在确定面积质量比和阻力系数后,细化框定因空间环境预测引起的碰撞概率变化(3区)。由图3 可见,该交会事件的碰撞概率在7×10~1.4×10范围内变化,3区的碰撞概率变化区间同整体空间环境激励图。也就是说无论空间环境如何变化,此次近距离交会事件的碰撞概率总小于1.0×10;若以万分之一碰撞概率为门限,则此次交会事件在可接受的风险范围内,可不进行轨道机动规避。
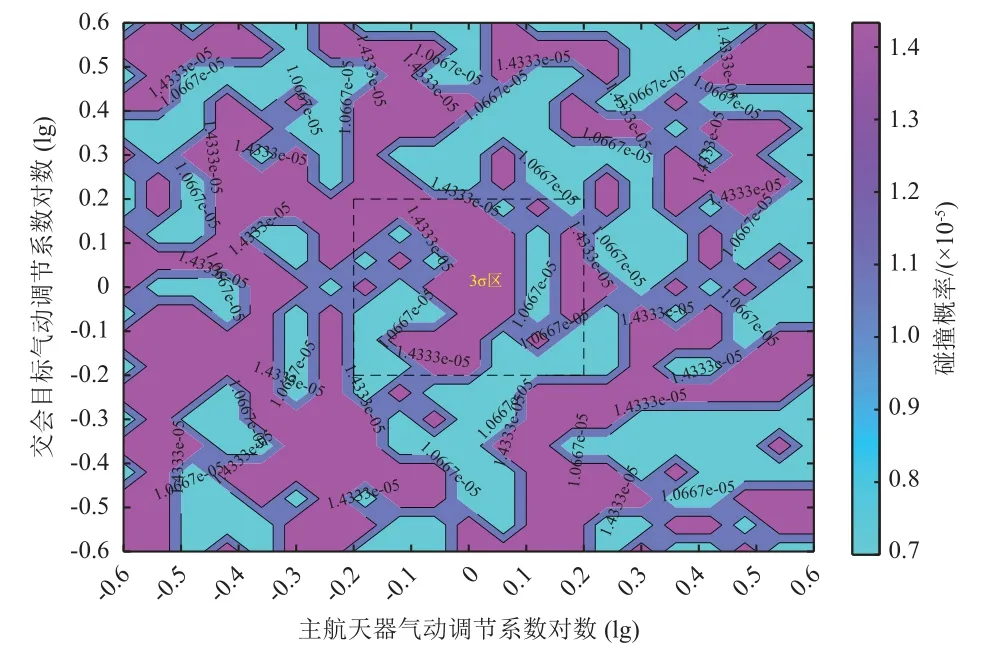
图3 目标40878 与05615 碰撞预警中的空间环境激励图Fig. 3 Space environment excitation diagram for collision warning of objects 40878 and 05615
上述2 个交会事件的空间环境激励图给出了气动力不确定因素下交会事件的碰撞概率变化情况以及碰撞概率变化的明确边界,可简单明了地为空间碎片碰撞预警事务决策提供参考。
需要说明的是,空间环境激励图计算较为耗时,一般仅适用于筛选后的重点交会目标。批量航天器常规碰撞预警工作中,在交会事件发生前1 天进行空间环境激励图分析,既可有效评估交会事件风险水平,又可降低计算负荷。
3 空间物体陨落预报中的应用示例
针对空间物体的陨落预报,本文设计了2 个算例,具体参数见表2。表中两目标信息除面积质量比不同外,其他特征信息一致,下文将面积质量比为0.02 的目标称为目标1,面积质量比为0.005 的目标称为目标2。
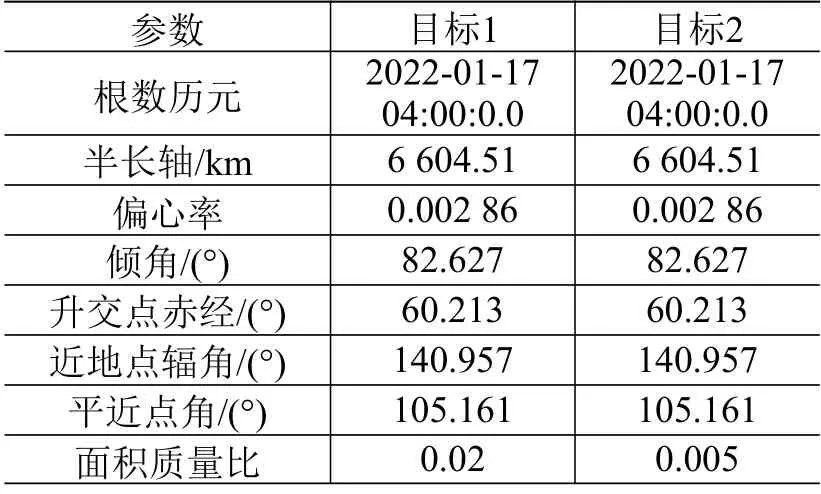
表2 陨落预报目标信息表Table 2 Orbit elements of fall-to-Earth objects
对目标1 进行气动力幅度0.251 2~3.981 1 的调节,绘制其陨落预报空间环境激励图(图4)。其中陨落时间偏移量是以气动力未调节情况下预测的陨落时间为基准。观察可见,图4 中的陨落时间偏移量在-50~200 min 之间变化。
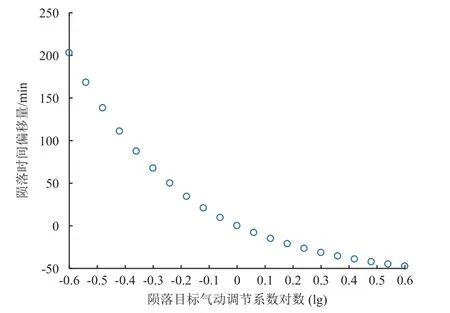
图4 目标1 的陨落预报空间环境激励图Fig. 4 Space environment excitation diagram for fall-to-Earth object 1
对目标2 进行气动力幅度0.575 4~3.981 1 的调节,绘制其陨落预报空间环境激励图(图5)。观察可见,图5 中的陨落时间偏移量在-200~140 min之间变化。
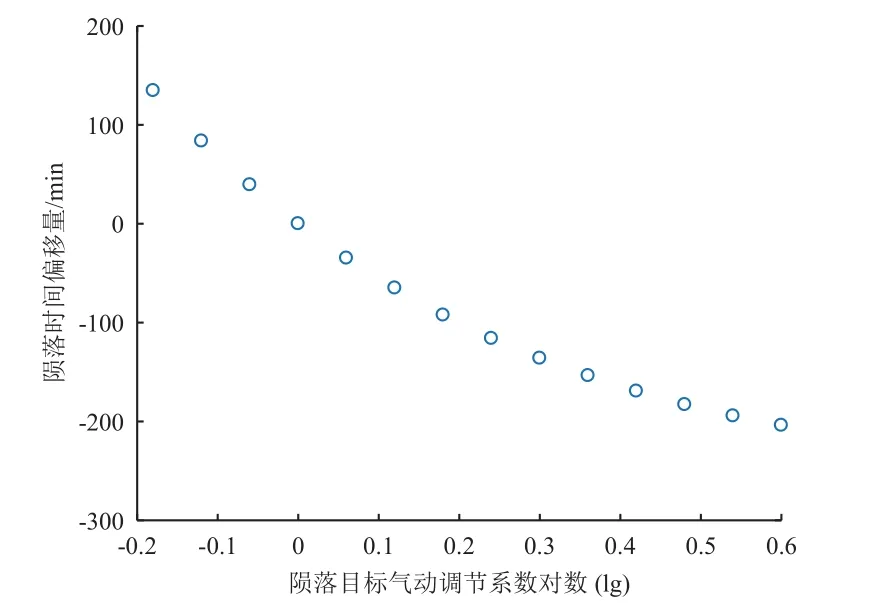
图5 目标2 的陨落预报空间环境激励图Fig. 5 Space environment excitation diagram for fall-to-Earth object 2
4 总结与展望
本文给出简化气动力误差模型,量化计算轨道预报相关事务的边界,提出空间环境激励图和3区的概念以及具体实施方法,以空间碎片碰撞预警和空间目标陨落时间预报为例进行计算验证。计算实例表明,空间环境激励图方法可有效解决因航天器物理特征以及空间环境扰动及其预报技术、预报模型等不确定因素制约,碰撞风险、陨落时间预报结果存在的模糊度问题。
空间环境激励图方法在表达扰动因素和模型误差对评估结果影响时优势明显,有望成为未来航天器碰撞风险评估应用的研究方向。下一步需要细化工作,精准评估“3区”,更加准确锁定和识别风险,并有望拓展应用到机动目标的搜索观测、识别等工作中。
