基于专利地图的转位机构前沿热点技术研究
2022-11-01吴永杰信光成
王 芸 吴永杰 信光成 黄 琛
(1.中国船舶集团有限公司第六三五四研究所,江西 九江 332000;2.中国机械工业集团有限公司,北京 100080)
0 引言
在军用武器装备如导弹核潜艇、军用轰炸机中,具有极高导航精度的静电陀螺常被使用。其系统是最早应用旋转技术的系统。从美国着手航天飞行器技术研发开始,捷联惯导技术得到应用。光纤陀螺、激光陀螺的出现使旋转式导航系统得以发展。旋转惯导系统就是在捷联惯导系统外部加上转动和控制机构,系统中的惯性元器件减少误差的方法之一是补偿方式,即通过翻转和旋转平均掉惯性元件的漂移误差,其相应的转动机构就是转位机构。
20 世纪 80 年代,国外研制了单、双轴旋转式导航系统,在90 年代旋转式导航系统得以改良和发展。中国对转位机构的研制起步较晚,2007 年开始取得初步成果;2008 年、2009 年期间得以优化和发展。总体来说,国内的旋转惯导系统研究已取得一定成效,但与世界先进水平相比仍有差距。
1 数据来源、分析方法和内容
1.1 分析方法
该文采用专利分析法,专利分析中最基本的挖掘目标是技术信息,通过挖掘、技术处理及统计学方法分析之后转化为可以预测技术发展分布和态势的多种数据形式,提供给研发人员作为找到未来产品发展或技术研发方向的参考。找出核心技术、分析研发热点和重点技术是专利分析法的突出优点。使用专利地图是其中一种重要的分析方法。
1.2 专利数据的来源
该文选择“智慧芽”专利数据库作为专利数据来源。智慧芽数据库的专利地图能准确分析出专利技术研发重点以及前沿热点。专利地图是利用文本聚类功能,基于机器学习,依据词类、词频等信息提炼出技术前沿热点并绘制出来的。
1.3 分析内容
该文利用数据平台,通过关键词检索出转位机构相关国内外专利1548 组来进行分析,并对其进行数据处理,保留有效专利数据870 组,作为分析研发热点和重点技术方向的数据依据。另外,对三轴转位机构技术,目前有公开资料的国家除中国以外,还有美国,这也是一个重点研发方向,因此,作为单独一节,该文通过关键词检索出相关专利,去除失效专利后保留10 组数据用于分析。检索数据截至日期是2022 年3 月。
该文通过专利数据分析转位机构技术的专利申请趋势、利用生命周期、技术领域分布以及技术和研发的热点、重点等信息,总结出该领域前沿技术未来发展热点的分布情况和重点研发方向。
2 全球转位机构技术分析
2.1 专利申请趋势
由图1 可见全球转位机构技术研究从2003 年开始已经成为研发热点,2003 年专利申请数量为19 件,之后基本保持着持续上涨的趋势,到2019 年达到顶峰,数量为178 件,随后有所下降,但仍然保持稳定的趋势。因此,转位机构技术研究仍然处于研究与开发的技术发展期。
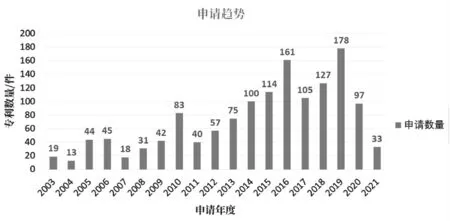
图1 专利申请趋势图
2.2 申请专利国家
表1 为申请专利国家及地区各年专利数量,截至2021年全球转位机构技术专利申请量最大的国家是中国,第二位是美国;法国、德国和日本紧随其后。到目前,中国已经成为转位机构技术研发的重点地区。
由表1 可以分析出在排名前五位的国家中,美国是最早开始研发转位机构技术的国家,2003 年度美国专利申请数量为11 件,其他国家都是0 件。中国的转位机构技术研发起步时间较晚,从2009 年开始有相关专利申请,数量为5件,同时申请数量按照年度计量单位稳定增长。2013 年起,中国专利申请数量逐渐超过美国,数量为29 件,美国为26件。到2019 年度中国专利申请数量达到最高点,为142 件,说明转位机构技术研发重心已经由美国转移到中国,由此可得出结论,该领域内中国部分技术水平已经处于国际领先。

表1 申请专利国家及地区各年度专利数量
从表1 还可以分析出转位机构技术专利的生命周期发展状况,由于专利申请有18 个月的公开滞后期,因此在分析时略去近两年专利申请数据,用2003—2020 年的专利申请数据进行分析,得出结论如下。2003 年到2008 年是该技术的萌芽期,2009—2012 年为技术发展期,2013—2015 年为技术成熟期,2016 年之后为技术再发展期,而且中国成为转位机构技术的研发大国。此后的数据显示除了中国以外,世界其他各国专利申请数量都在减少,这是因为转位机构技术应用于空间站的对接,以美国为首的其他国家出于技术保密的原因,申请专利数量减少或者为零。所以转位机构技术研究的技术生命周期仍然处于发展阶段。
2.3 被引用专利分析
通过对数据平台中数据检索和分析,从有效专利数据中列出在转位机构技术领域排名前10 位的被引用次数最多的专利,代表该技术领域核心创新技术,且更具影响力。
由表2 可见,虽然中国在转位机构技术领域申请专利数量较多,部分专利已处于世界领先水平,但在被引次数最多的前十位专利中,美国仍然处于绝对领先地位,且重点领域主要集中在自校准、惯性系统测量等方面。由此得出结论,该领域核心和创新技术仍然被美国掌握。
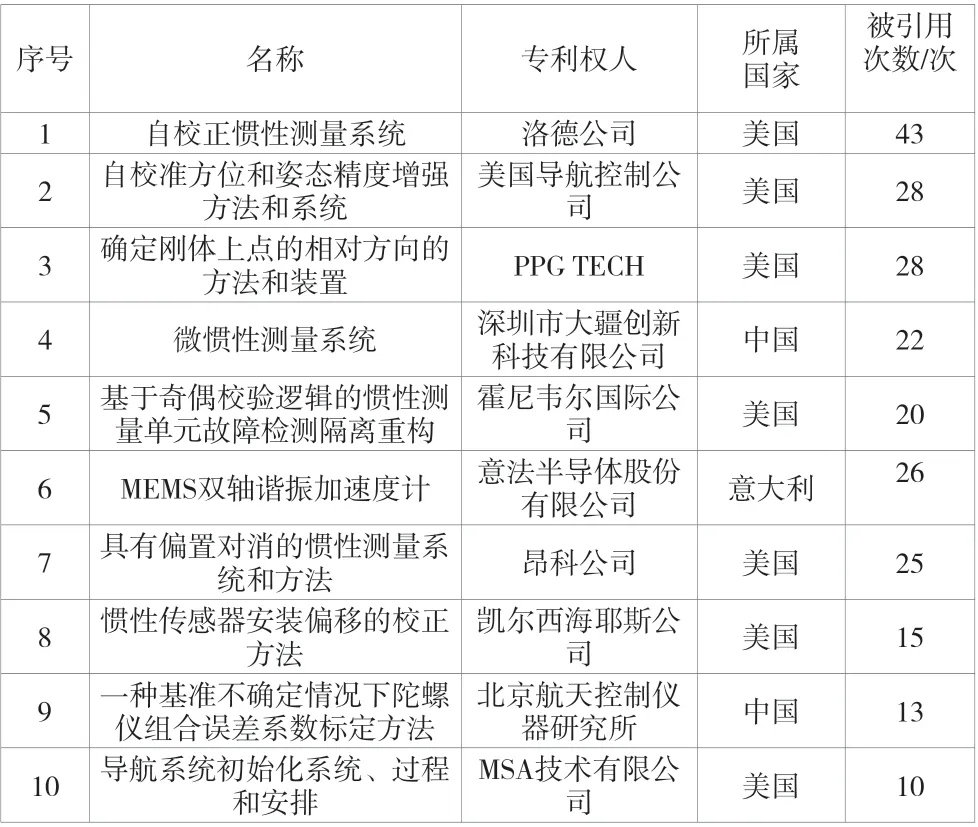
表2 被引用专利排名
3 前沿热点及研发重点技术分析与预测
3.1 重点研究领域
该文选取数据库全球相关专利申请的数据,统计了前10位的重点研究领域,见表3。可见主要技术领域分布在仪器或装置的制造和校准、陀螺仪、加速度计及测量,标定定位和寻北等方向上。
从表3 和图2 可见,中国的研究热点主要集中在仪器或装置的制造和校准、速度或加速度测量以及陀螺仪这几个方向上。美国在速度、加速度测量及校准以及标定定位、多轴导航组合仪表这些技术方向的研究优势略高于中国。

表3 专利IPC 分类号(小类)排名

图2 重要技术领域分布图
3.2 专利技术地图
如图3 所示,其中颜色面积大的部分表示专利数量多,突起即为该领域的研究热点或重点。由图3 可知,光纤陀螺仪、微测量单元、惯性仪器、导航设备、飞行器、角度定位以及标定、对准、低性能等技术领域的研究都是当前的研发热点和重点。
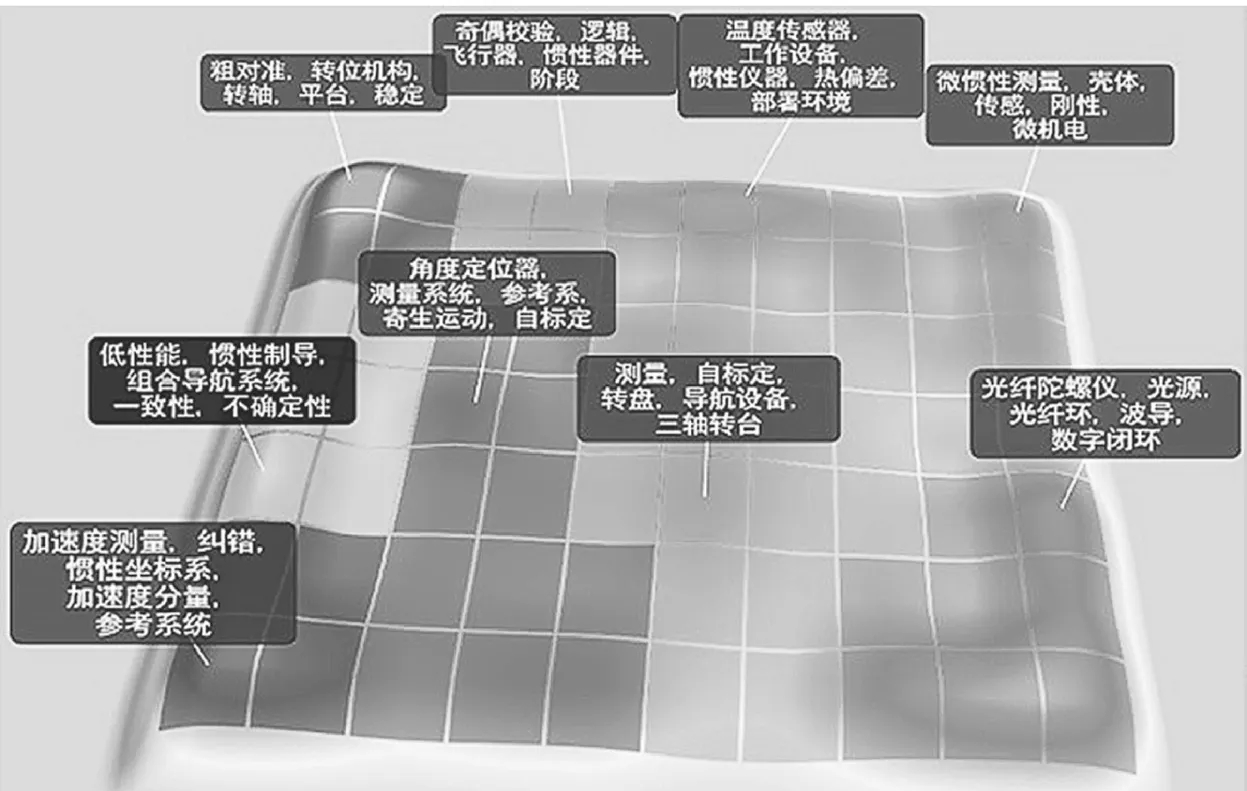
图3 转位机构及相关技术领域专利地图
在当前的高精度光纤陀螺惯导系统中普遍采用旋转自动补偿技术,目的是为了提高精度。表4 选取了2003 年~2020 年的专利数据,可以看出,从2009 年开始,中国的光纤陀螺仪技术领域已成为研发热点,到2019 年度达到顶峰,之后有所下降。

表4 光纤陀螺仪技术领域专利申请人各年度专利数量表
从专利申请量来看,中国在这一领域排第一,年度专利申请数量超过其他各国,也就是说目前除了中国,其他国家并未开展大规模的专利布局,因此该领域可以成为研发热点和重点。
可靠性高、体积小、质量轻以及低成本都是微惯性测量系统的优点。由表5 可知,当前只有中国、美国和意大利有相关专利,在这一领域中国和美国的专利申请数量都不太多,但是比较平均,每隔一段时间就会申请相关专利。

表5 微惯性测量系统技术领域专利申请人各年度专利数量表
因此可以得出结论,这一领域也是研发方向,研发热点主要有制造工艺、轴系结构、微型化等。
由图4 可看出转位机构定位系统研究、定位方法研究以及角度定位装置研发都是该技术领域研究的热点和重点。

图4 定位技术领域专利地图
对转位机构精度误差产生影响的加速度计是旋转调制式捷联惯导系统中的重要元件,也是惯导解算的数据来源。因此,加速度计及测量方法的研发也是一个方向。
分析表6 可知,在这一领域最早开始研发的是美国,中国研发起步较晚,直到2016 年才开始有相关技术专利,全球范围内在这一领域进行研究的国家比较少,目前只有中国和美国,因此这一领域是研发空白点。

表6 加速度计及测量技术领域专利申请人各年度专利数量表
4 三轴转位机构技术
4.1 申请国家/地区
由图5 可以看出,截至目前全球专利申请量最大的国家是中国,申请专利数量基本保持一个稳定的态势,也就是说三轴转位机构的核心和创新性技术已经逐步被中国掌握,在这一领域中国部分核心技术处于世界领先水平

图5 三轴转位机构及相关技术专利申请人申请趋势图
4.2 高价值专利
通过数据检索和分析,从有效专利数据中列出在三轴转位机构技术领域排名前5 位的高价值专利。
由表7 可知,在这一领域拥有高价值专利数量最多的是哈尔滨工业大学,共计3 件。拥有专利价值最高的北京控制工程研究所在表中排名第1 位,且重点领域主要集中在校准和标定等方面。
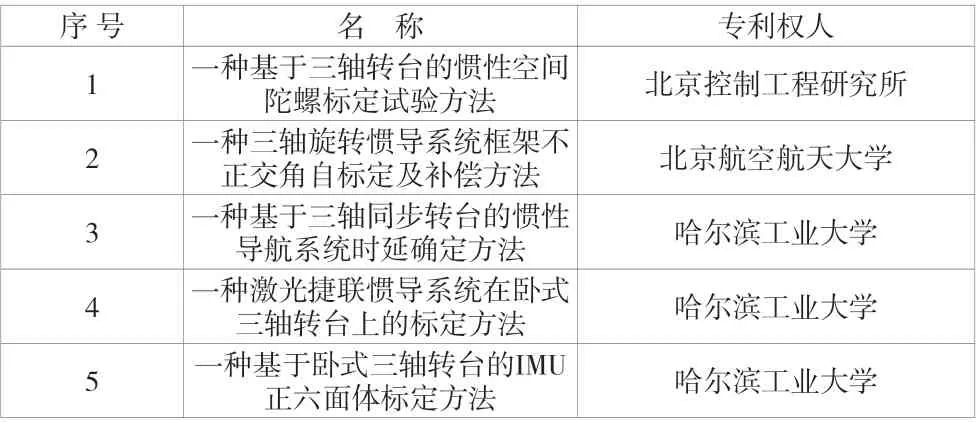
表7 三轴转位机构高价值专利排名
4.3 专利技术地图
由图6 可知,三轴转位机构技术在各个研发热点的专利数量比较平均,图6 中凸起的部分都可以作为研发热点进行研究。三轴转位机构技术的研发热点和重点方向包括三轴旋转和三维姿态、加速度计及相关技术、系统误差、标定或试验方法、校准方法等。
5 结论
该文通过专利分析,并基于专利地图揭示了转位机构技术的研发热点和重点方向。首先分析了全球专利申请趋势、各国年度专利申请数量,其次统计出全球技术分布国家和地区及创新机构排名分析,再次进行被引用专利分析,并通过以上专利分析总结出该领域的前沿热点及研发重点技术,最后通过IPC 分类号排名、专利技术地图等具体分析得出以下结论。1) 在转位机构技术领域中国申请专利数量较多,但专利价值略低于美国。2) 在转位机构技术领域,核心和创新技术仍然被美国掌握,且重点研究领域主要集中在自校准、惯性系统测量等方面。3) 光纤陀螺仪、微惯性测量系统、定位技术、加速度计及测量等技术领域的研究都是当前的研发热点和重点。4) 三轴转位机构技术也是一个重点研发方向,三轴旋转和三维姿态、加速度计及相关技术、系统误差、标定或试验方法、校准方法等都可以作为研究热点和重点。在转位机构技术领域,面对研发速度快速递增的当今时代,中国对相关技术的研发能力还需要进一步提高,应以自主研发为手段,在吸取国外相关技术研发优点的基础上提高技术含量,加速掌握核心技术,最终提高中国在世界竞争中的地位。

图6 三轴转位机构及相关技术专利地图
