农机触土部件仿生减粘技术研究现状及展望
2022-10-31刘露王莲冀胡红廖劲杨
刘露,王莲冀,胡红,廖劲杨
(1.610039 四川省 成都市 西华大学 机械工程学院;2.610039 四川省 成都市 西华大学 现代农业装备研究院)
0 引言
仿生技术是一种用人造的处理手段、物质、设备或系统模仿自然的技术,在医疗、军事、工业、农业等领域均有应用[1]。在农业方面,根据土壤动物运动或掘土时具有脱土减粘的现象,提取并模仿此类动物身体某些部位的几何构型或运动特征,制造成仿生部件,降低土壤粘附,增加耐磨特性、使用效率及寿命。吉林大学的科研人员在20 世纪80年代发现蚯蚓、蜣螂、穿山甲等动物具有良好的防粘减土特性,1993 年吉林省批准成立以工程仿生研究所为技术依托的“吉林省地面机械仿生技术与仿生功能材料中试基地”。截至目前,机械仿生成为国家“211 工程”农机工程重点学科[2-3],并得到了仿蚯蚓柔性蠕动机器人、仿生开沟器、仿生非光滑犁壁等新产品。
为了明确农机触土部件仿生技术的发展现状,本文按照土壤动物柔性运动特征、分泌物和身体器官进行分类,综述了目前国内农机触土部件的研究现状及应用案例,并按照时间顺序整理了相应部件。探寻仿生减粘技术的发展方向,以期为优化农机触土部件设计、满足农机装备发展需求提供参考。
1 基于土壤动物柔性运动特征的仿生研究现状
土壤动物柔性特征是一些土壤动物通过转动、蠕动等运动,减少与土壤的接触时间,实现土壤无法压实接触面的目的[4]。对具有柔性特征的动物分析表明,这些动物均能实现减少粘附,常见的具有柔性特征的土壤动物有蚯蚓、马陆等。目前国内外主要集中在对蚯蚓的仿生研究。
蚯蚓是一种常见的柔性动物,生活在潮湿的土壤中,昼伏夜出,摄入畜禽粪便和有机废物垃圾,也摄入植物的腐烂茎叶等碎片,可使土壤疏松、改良土壤、提高肥力促进农业增产[5]。用SZX12 体视显微镜对蚯蚓表面特征进行分析发现,蚯蚓身体由100 多个体节组成,其头部呈圆锥状,体部呈圆柱状,体节与节间组成环节结构,环的中间部分隆起成裬且有刚毛,在爬行时起固定支撑作用和辅助运动作用。蚯蚓体表不同部位的非光滑程度各不相同,体部纹理小而密,头部纹理大而稀[6]。根据蚯蚓运动特性,分为收缩态、静息态、舒张态。舒张时,非光滑单元密度减小;收缩时,非光滑单元密度增大;静息时,非光滑单元密度居中[7]。某一节纵向肌肉收缩时变得短而粗,环状肌肉收缩时变得细而长,从而控制不同节的径向尺寸粗细顺序的运动是蚯蚓独特的柔性蠕动原理[8]。
目前国内外应用蚯蚓柔性蠕动原理及不粘土的特性,仿生开发出各种机械部件。如吉林大学团队开发出2 种自卸车技术[9-10]。钢链采用挂钩式安装、非均匀布置使得其产生柔性变形,从而提高了自卸车的生产率;米智楠[11]等根据蚯蚓柔性蠕动的原理研制出一种微小仿蚯蚓柔性蠕动机器人,可用于核工业管道及热交换器等复杂管道的检测与维修。该机器人分为4 个柔性单元体,每个单元体由SMA 合金丝和金属弹簧构成;贾宝贤[12]等基于这种运动原理研制出一种孔内行走机器人装置,该机器人采用计算机控制系统的驱动装置,适用于较大曲率的弯孔、移动速度慢的工作环境;米智楠[13]等通过肠道检查的实验,证实蠕动式柔性机构能够在机器人和肠道之间实现移动功能;简小刚[14]、VICKY[15]分别通过建立软性的安全缓冲层,应用计算机仿真技术模仿机器人的实时动态;第二届国际创客节比赛上,佛山科学技术学院团队设计出一种以软性材料为外壳的仿蚯蚓软体机器人(如图1所示),有高灵活性[16]。

图1 仿蚯蚓软体机器人Fig.1 Earthworm-like soft robot
2 基于土壤动物分泌物的仿生研究现状
分泌物是从一些动物的器官、细胞或组织中产生的物质。其中土壤动物的分泌物大多在运动过程中产生。通过对能产生分泌物的土壤动物研究发现,分泌物能润滑接触界面,减少土壤粘附,国内外目前仅对蚯蚓进行了仿生研究。
蚯蚓分泌的体表液是一种由糖苷键连接的、以粘蛋白为主溶质的水剂稀溶液[17],与体表、土壤一起构成3 层界面系统[18]。体表液提供了一个弱剪切层,在土壤动物体表与土壤层之间形成润滑界面[19],可降低土壤对动物体表的粘附。
马云海[20]等基于蚯蚓分泌的体表液,以超高分子聚乙烯为原料,设计出一种仿生波纹形开沟器,该开沟器采用波纹非光滑形态的表面规律,其基体由芯铧、铧柄、翼板组成;在仿生波纹形开沟器的基础上[21-22],考虑土壤含水量、土壤硬度、开沟深度及开沟速度等因素,提出仿生复合开沟器(如图2 所示)。研究发现,土壤堆积角测试及阻力、润滑试验得出减阻率随着土壤硬度、开沟深度、润滑液流速的增加而增加,随着开沟速度、土壤含水量的增加而减小;张东光[23-24]等基于蚯蚓粘液的减阻特性,设计出一种仿生注液沃土装置(如图3 所示)。该种装置采用超高分子量聚乙烯为加工材料,仿照指数曲线型的深松铲为配套机具开展土槽试验。试验证明,表面结构、孔数、材料对土壤粘附量影响显著,且注液影响最大。此后,采用Box-Behnben 试验优化方法表明入土深度、注液量、土槽车速度对土壤黏附力的影响显著,且深入影响最明显。
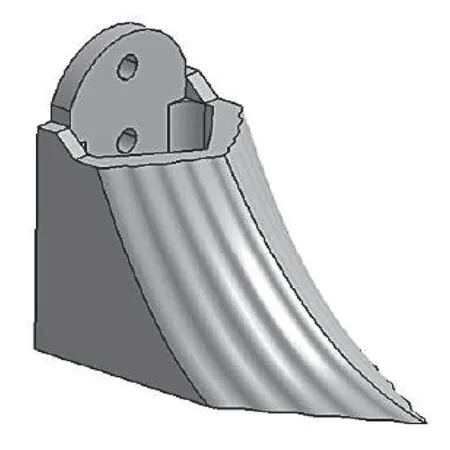
图2 仿生复合开沟器模型Fig.2 Model of bionic composite ditch opener

图3 仿生注液沃土装置Fig.3 Bionic liquid injection device for fertile soil
3 基于土壤动物体表结构特征的仿生研究现状
在自然界中,一些土壤动物具有强的挖洞能力,能借助身体的四肢快速挖土。研究发现这些土壤动物具有坚实而发达的表皮,能帮助运动。结合国内外文献,发现土壤类动物研究集中在鼹鼠、穿山甲、克氏原螯虾、蜘蛛、蝼蛄、蜣螂,而研究蜣螂最显著。
克氏原螯虾是一种杂食性动物,常出没于砖石缝隙中,能在生活及工业废水的环境下生长良好。蜘蛛分布广泛、善于捕捉昆虫[25];蝼蛄善于游泳、疾走和飞行,摄食植物叶片、根与茎。蜣螂以动物的粪便为食,在晚上活动[26];穿山甲喜欢夜晚觅食,夏秋时节喜欢住在山坡上层,春冬喜欢住在洞的深处[27];鼹鼠主要摄入昆虫,群居生活。观察发现,大部分土壤动物喜爱挖洞,进化出了相应的头、腹和爪等部位,这些部位表面分布有刚毛,产生的刚毛与表面接触,形成了一系列接触区,能减少与表面接触的黏附力[28-30]。克氏原螯虾头胸部与外骨骼表面有凹陷和凸包,这些结构的一侧分布有刚毛[31];蝼蛄覆翅刚毛簇状排列,前胸背板、膜翅、腹部刚毛平行于身体排列[32];蜣螂头部与爪部[33-34]为凸包形,头部的腹面和口器的四周密集刚毛;蜣螂腹部存在阶梯型波纹非光滑,有凹陷,凹陷中央有小毛窝和短刚毛[35];穿山甲爪趾活动性强、自由度高,前趾最长[36-37];鼹鼠越靠近爪尖、爪越加锋利且磨损明显,正面呈弧线分布,背面平状态分布[38]。
吉林大学团队李建桥[39]等人对蜣螂体表进行了定量研究后,通过计算机仿真模拟非光滑表面,开发试验了仿生非光滑犁壁;张毅[40]等人设计了仿生圆盘犁犁体,以电镀的制造形式探究了圆面规则与不规则对减阻的影响,发现规则的圆面减阻效果更好;文献[41-42]分别分析了蜣螂体表数字特征,为了适应工业化生产需求,探索了不同加工工艺并规范了犁壁单元体尺寸;在吉林大学设计的仿生犁基础上[43-44],深入研究蜣螂的减黏原理和生理规律,设计出一种仿生非光滑犁-普通犁表面规律分布具有特殊形状的单元几何体。田间试验证明,这种仿生犁壁与土壤接触时,可产生微振效应、水膜不连续效应和界面空气膜效应,表现出翻土碎土率高的优势,且结构单元的填充程度与底圆半径占减阻性能的主要因素;王国林[45]等基于蜣螂等土壤动物的非光滑体表结构,进行了推土板仿生分形设计并开展推土试验,增加了土壤大变形和微振效应,减少了黏附的发生;何龙飞[46]等结合仿生犁的现有理论,设计并试验了仿生非光滑螺旋钻头,解决了粘性土钻进螺旋钻头阻力大的难题。这种仿生钻头采用单翼片式的钻头结构,球冠状的凸包形状,对称的凸包表面(如图4 所示)。土壤试验表明这种钻头有效降低功率消耗、节约能源;文献[47-48]分别研制了仿生金刚石钻头,这种钻头的工作层唇部始终有相同的非光滑形态。野外生产试验表明,这种钻头具有更好的耐磨性能及减阻特点。

图4 非光滑钻头设计图Fig.4 Non-smooth bit design
吉林大学研究人员[49-51]对凸包形非光滑表面进行了三维有限元分析,提出凸包形推土板的减粘分析,假设凸包形状,开展凸包形推土板与光滑推土板的土壤对照试验。结果表明,凸包形推土板减粘效果更好,且凸包高度不宜过大;贾得顺[52]模仿蜣螂、穿山甲等的形态、器官结构与控制原理设计了一种仿生型推土板,模拟仿真了抛物线型、圆弧型、摆线型等不同准线形式的模型。在土槽实验室的结果表明,渐开线型推土板减阻能力最好;肖茂华在杨玉婉对鼹鼠前肢手掌趾而设计的仿生旋耕刀[53]的基础上,结合节肢类动物蝼蛄爪趾特征,运用逆向工程技术拟合轮廓曲线,设计了一种基于蝼蛄爪趾的仿生旋耕刀[54],如图5 所示。以刀轴转速为自变量,探究了与仿生旋耕刀扭矩、三向阻力与国际旋耕刀之间的联系,田间试验证实该仿生旋耕刀能有效降低水平、竖直阻力和平均能量损耗。

图5 仿生旋耕刀结构图Fig.5 Structure diagram of bionic rotary tillage knife
吉林大学团队等人利用土壤动物的特性,应用到深松部件中。早期的深松机应用单一、效率低[55]。之后,贾红雷[56]等人研制出仿穿山甲鳞片扶垄铲,具有优良的减粘性能。作为仿生智能耕播机的核心部件,有效解决了大豆发育慢的难题。利用耦合仿生的方法,深入研究穿山甲鳞片和狗獾爪趾的结构,设计出一种最大程度减少粘附阻力的仿生深松铲,如图6 所示。通过田间试验等,得到了不同深度下运动速度和使用材料的有效值[57-59]。为解决旋耕刀缠草问题,该团队和其余高校[60-61]发现仿鼹鼠足趾结构能有效减粘,2017 年研发出旋耕-秸秆粉碎锯齿刀,通过仿真和田间试验证实在提高扭矩、完成作业质量方面均较国际旋耕刀好。2018年基于足趾的多窄齿组合结构,设计出仿生切土刀片(如图7 所示),并开展土壤试验探究证明了该部件能有效减小水平阻力[62-63]。

图6 耦合仿生深松铲Fig.6 Coupled bionic deep loose shovel
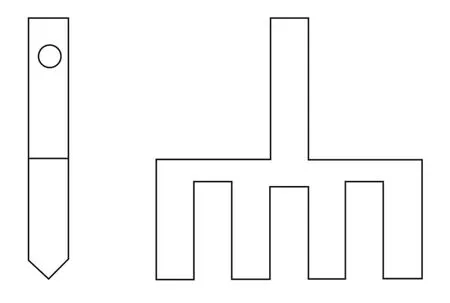
图7 仿生型切土刀片示意图Fig.7 Schematic diagram of bionic earth cutting blade
4 展望
目前基于土壤动物的特殊体表而研究的仿生学虽取得一定进展,但对该领域的研究还不够深入,认识的减阻结构有限,实验取样时往往经过处理,并且由于现代仿生作业的研究深入,对农机触土仿生部件提出了更高的强度、韧性等要求,因此结合目前国内外仿生技术的研究现状及需求,提出以下展望:
(1)加强仿生材料及多种工艺方法的使用的研究。表面涂层、表面热处理等方法产生的复合仿生材料将在农业机械触土部件发挥重要作用。如使用耐磨性、耐冲击性好的超高分子量聚乙烯是仿生上耐环境的一种优良材料;聚四氟乙烯涂层具有良好的疏水性,耐磨性强,减阻性能良好,其特殊的螺旋结构和不粘性质有一定作用。
(2)加强脱土机理研究。土壤动物的脱土过程多为动态,粘附界面理论的研究不应只局限于静态,应结合粘附力学与规律探讨粘附阻力与非光滑结构单元的填充程度、类型及排布方式等的动态联系并且结合耦合效应等设计出更有效的复合型仿生技术。同时,通过开展模拟仿真和土壤试验算得不同技术的最优运动速度、最优深度、最优尺寸等值。
(3)强化生物的在体测试与分析。目前的部件设计多是基于土壤动物的爪趾轮廓,未针对触土部件的使用环境进行生物原型的计算和分析,且研究多集中于无生命的离体动物。应提高触土部件的优化可靠性并增加在体动物的无清理试验次数,将土壤动物的运动特征引入触土部件机构优化设计中,如化学吸附、耐磨减阻等特性。
(4)高度重视农机农艺融合。针对各区域的土壤类型、粘土含水率、孔隙度、有机质含量等的不同,触土部件优化要符合当地种植农艺需求,兼并经济绿色、使用寿命等要求,以易操作、易携带等性质满足农民自我需要。如丘陵地区土壤含水量较高,部件一定要优先考虑耐腐蚀;沙漠地区有机质含量与含水率较低,优先考虑耐磨性和润滑性。
