模拟履带-软黏土相互作用的环形触探仪研发
2022-10-29黄伟健廖晨聪刘世奥叶冠林
黄伟健,廖晨聪,刘世奥,叶冠林
(上海交通大学 船舶海洋与建筑工程学院,上海 200240)
海底蕴藏着丰富的石油、天然气、多金属结核等重要的矿产资源。海底油气管线敷设、多金属结核矿物采集、挖沟埋缆等均使用履带机器人进行床面行走作业[1]。履带的常见行走位置在海床表层0.2~0.3 m深度[2],该位置土体含水率高、强度低,如果海床无法提供足够的驱动力,履带与海床之间将发生较大的相对滑移,表现为履带发生陷入、打滑、空转等问题,大幅降低作业效率。由于海床表层土应力水平极低,静力触探测试仪(CPT)和T型全流触探仪(T-bar)等原位测试设备亦无法准确评估土体力学特性,研发合适的触探仪用于评估履带对海床的作用过程与作用机制意义重大。
理论研究方面,地面力学创始人将履带行走分为压陷和剪切两个过程,并提出相应的压陷模型和剪切模型,奠定了地面行走研究的基础[3];试验研究方面,Schulte等[4]采用十字剪切板、剪切环、履带板等对模拟海泥进行了剪切试验,提出了校正剪切装置灵敏度的方法。国内学者李力等[2]进一步在配置的海泥上进行了平板压陷试验和履带板剪切试验,得到压陷曲线和剪切曲线,拟合曲线后推导出履带牵引力公式;王江营等[5]在配置的膨润土混合物上进行了压陷、剪切试验,考虑了前人模型试验的缺陷,提出一种克服模型边界条件干扰的计算方法,最终得到有相同发展趋势的归一化压陷曲线和剪切曲线;Ma等[6]在前述研究建立的履带牵引力理论基础上,探究了履齿参数与海底采矿机器人牵引力的关系;Li等[7]则采用建立履带驱动模型的方法,分析了履带结构参数对软弱沉积物上履带机动性能的影响。这些研究成果对研究履带行走具有重要的参考意义,但采用的试验仪器和方法与真实的履带-软黏土相互作用过程契合程度依旧不足,如压陷板存在的“末端效应”容易造成应力集中、剪切板存在的“推土现象”会影响试验结果的准确性,而且这两部分的试验往往是单独进行的,这与履带先压陷后剪切软黏土的连续性过程不一致。
为了正确反映履带压陷与剪切海床的连续过程,提出了新的环形触探形式和工作方法,将履带床面行走的压陷和剪切过程统一到触探仪的压陷贯入和扭转剪切中。运用ABAQUS有限元数值模拟方法,通过与前人室内模型试验的对比验证环形触探仪概念的有效性和可行性,并对履带结构参数齿距、齿高进行敏感性分析,探究履带结构参数对软黏土强度发挥的影响。
1 仪器概况
海底履带机器人通过自重向床面施加法向荷载,引起床面下陷并产生行驶阻力;作用在履带上的扭矩引起行走装置对床面的剪切作用,这将产生相对剪切位移和与之关联的剪切力(图1(a))。在车辆地面力学的试验研究中,文献[3]最早提出一种用于测量地面对荷载响应的方法——贝氏仪技术(图1(b))。贝氏仪包含两组单独的基本测试:一组平板压陷测试和一组环板剪切测试[8],分别对应压陷曲线和剪切曲线(图1(c))。后来的学者在此技术基础上,根据研究对象的不同对试验仪器做适用性微调,但没有脱离贝氏仪两组基本测试的框架。
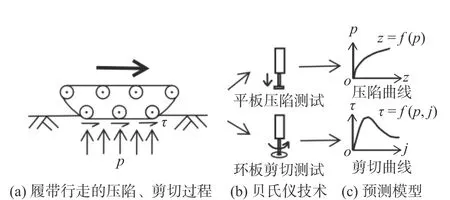
图1 传统贝氏仪技术Fig. 1 Traditional bevameter technology
本文提出一种直接模拟履带-软黏土相互作用的力学触探仪器,主要由受荷杆、环形板和履齿组成(图2(a))。通过将触探仪先压入后扭转的连续过程,模拟实际履带压陷和剪切的行走过程,从而测得相关地面力学参数。环形触探仪的设计中,最为关键的是杠杆臂长L与环宽B的尺寸比例问题(图2(a))。L/B过 小将无法合理体现履带板的尺寸效应,L/B过大则会给仪器的使用带来很大不便。Yan等[9-10]通过数值优选,验证了L/B=2是最低干扰条件的代表值,意味着进一步缩小环的尺寸将对精度带来较大影响。而文献[3]推荐的环外径内径之比R/r为1 .1~2.0 ( 即L/B=1.5~10.5),对比换算后,兼顾二者取最小参照尺寸L/B=2 。环形触探仪的齿距则以(R+r)/2为半径的圆周长除去履齿数目来确定。此外,履齿高度、宽度由于设计的多样性,其尺寸一般根据实际履带缩尺得到。

图2 环形触探仪Fig. 2 Torsional penetrometer
履带机器人在软黏土海床上行走时,履带-软黏土相互作用是连续的压陷、剪切过程,可通过环形触探仪对软黏土的压陷贯入和扭转剪切实现模拟(图3)。压陷过程中,将环形触探仪贯入软黏土中,齿间的软黏土成为压应力区(图3(a))。齿间的软黏土受压后由于两侧履齿的约束只能向环内外两侧产生塑性位移,而且履齿发挥着类似“桩基”的作用,所以较于压陷平板能提供更大的竖向承载力,相比压陷板更能体现履带-软黏土相互作用的实际过程。连续进行的剪切过程中,向压入土体的触探仪施加扭矩使齿间软黏土受剪直至发生塑性破坏,环的内侧、外侧及履齿剪切底面是剪应力区(图3(b))。值得一提的是,触探仪的压陷过程使下方软黏土存在一定的压实限制,这一点是环形触探仪对履带-软黏土相互作用连续过程的复现,传统履带板剪切试验则不具备。
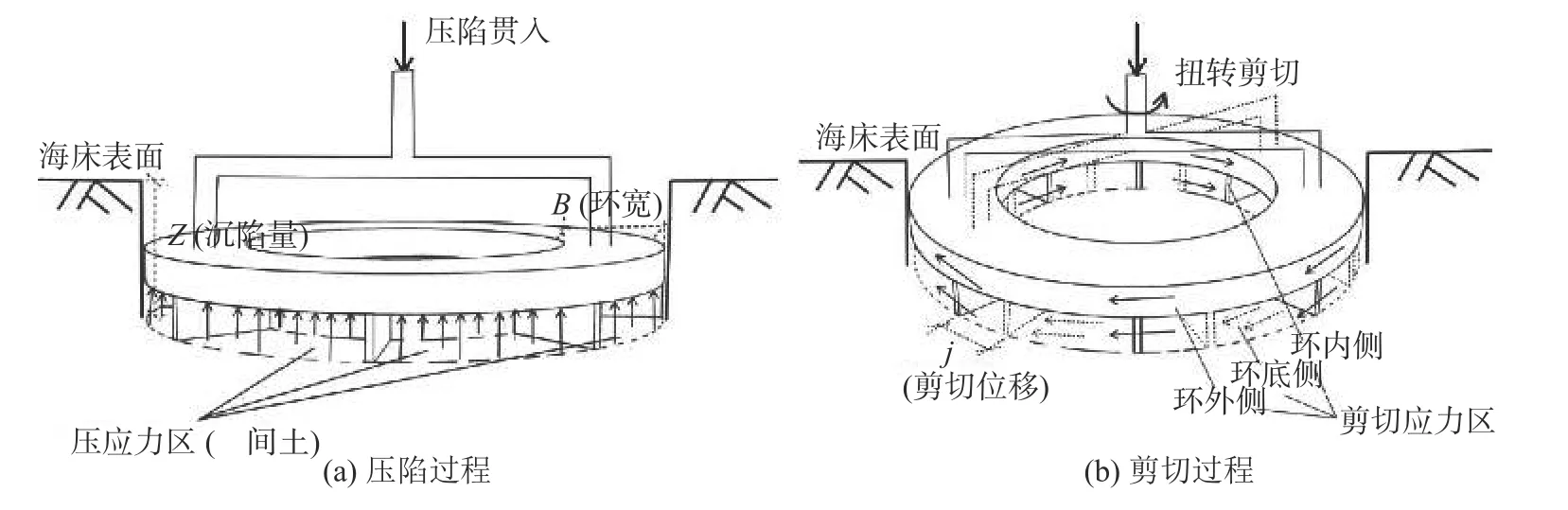
图3 环形触探仪工作机理Fig. 3 Mechanism diagrams of torsional penetrometer
2 环形触探仪的有效性验证
为验证上述环形触探仪模拟履带连续行走的有效性,采用ABAQUS有限元软件,建立环形触探仪及土体有限元模型,将触探仪的压陷过程、剪切过程数值模拟结果与李力等[2]的室内压陷、剪切试验结果进行对比分析。
2.1 有限元模型
有限元模型如图4所示,环形触探仪的杠杆臂长L与环宽B之比为L/B=2,为消除边界条件的影响,圆柱形土体模型的半径和高度均取环宽B的10倍,即R=H=10B。整体有限元模型如图4(a)所示。由于模型轴对称特性,可基于循环对称算法(cyclic symmetry)取一个履齿-土体切片单元模型进行计算,保持计算精度的同时,可大幅减少计算量,如图4(b)所示。

图4 有限元模型及网格划分Fig. 4 Finite element models and mesh generations
土体外侧边界的水平向及底部的三向均施加位移约束,模型沿旋转方向的主从面根据循环对称算法要求相互绑定来传递位移,履齿与土体的接触面设置为完全粗糙,减少相对滑动有助于计算收敛。单元均采用八结点线性六面体单元C3D8R,切片单元个数为14 540,接触位置单元局部加密。履带机器人海底行走时,履齿能到达浅层200 mm深,参照李力等[2]室内试验模拟海泥参数,本文选取的Mohr-Coulomb强度参数为:剪胀角0°,密度1.40 g/cm3,内摩擦角0°,黏聚力3.6 kPa,杨氏模量1 MPa,泊松比0.49。
2.2 压陷过程验证
参考文献[2],选取相应尺寸的矩形平板、无履齿环形板(图5)及带履齿环形触探仪等进行压陷过程的数值模拟,并将数值模拟结果与文献[2]压陷试验所获得的压陷曲线进行对比分析,完成压陷过程的验证。压陷装置的尺寸对比如表1所示。

表1 压陷装置尺寸对比Tab. 1 Size comparisons among compression devices
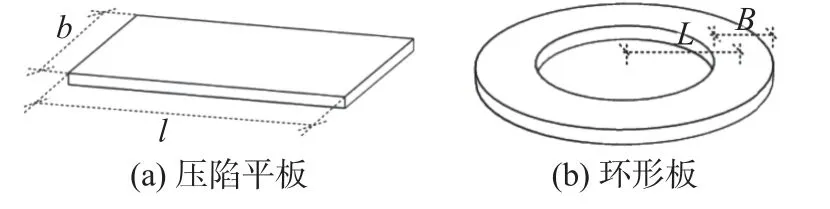
图5 压陷装置Fig. 5 Compression devices
为消除矩形平板尺寸的影响,本文根据Reece[11]提出的方法,将沉陷量与矩形平板宽度的比值(z/b)作为压陷曲线的自变量。2组不同尺寸矩形平板的数值模拟和试验所获得的压陷曲线对比如图6(a)所示,平板、环形板、环形触探仪的数值模拟所获得的压陷曲线对比如图6(b)所示。
从图6(a)可见,归一化的压陷曲线发展趋势基本一致,初始压应力随压陷量快速增长,随后增长趋于平缓,与试验相比,数值模拟获得的压陷曲线经过迅速增长后压应力更易趋于平缓,数值和试验结果基本一致验证了数值方法的可行性。从图6(b)的对比可以发现,在关键尺寸相同的条件下,3种装置的压陷曲线发展趋势基本相同,平板压应力值稍大于环形板,环形触探仪压应力值又大于平板。环形板与环形触探仪的唯一区别是有无履齿,带履齿的环形触探仪压陷过程能获得更大的压应力,是因为压陷过程履齿所发挥的“拢聚作用”使压陷范围内的软黏土位移受到约束,履齿还有类似“桩基”的作用,所以环形触探仪获得更大的竖向承载力,这更符合履带在海床软黏土上的实际压陷过程。综上可以验证,在相似尺寸、相同软黏土参数条件下,环形触探仪能合理地模拟履带的压陷过程。
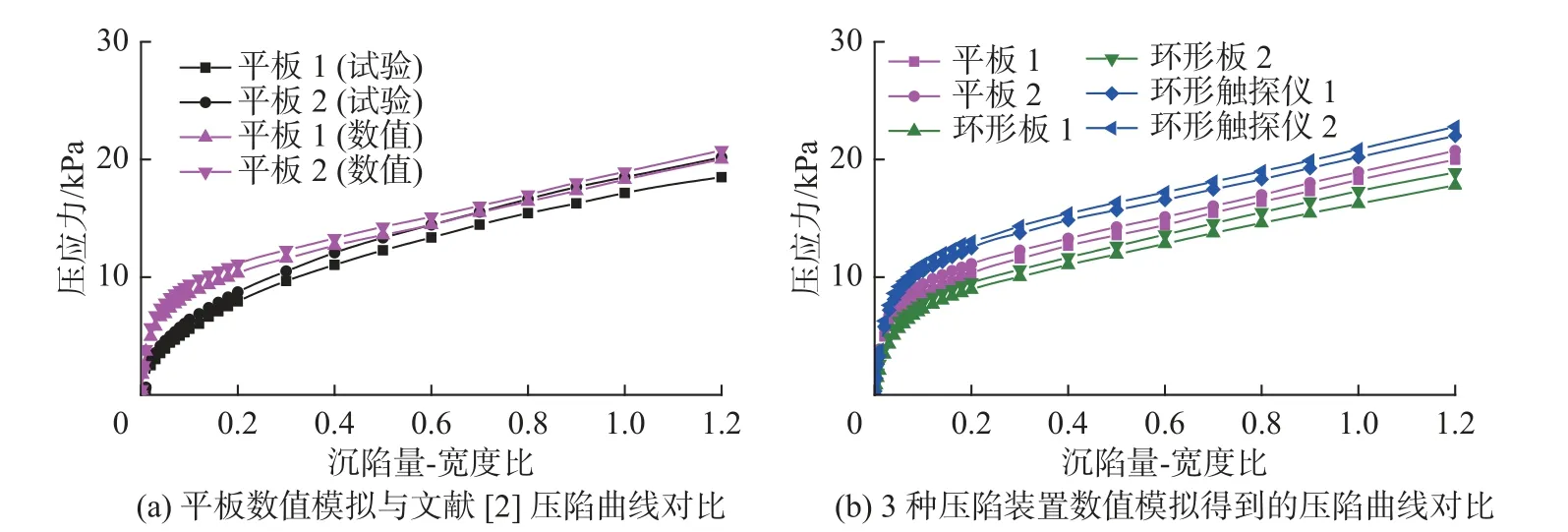
图6 压陷过程的曲线对比验证Fig. 6 The curves’ comparisons and verifications of the compression process
2.3 剪切过程验证
选用2组不同尺寸的环形触探仪与履带板(图7),将触探仪数值模拟与文献[2]履带板剪切试验得到的剪切曲线进行对比分析,完成剪切过程的验证。所有剪切装置的尺寸对比如表2所示。
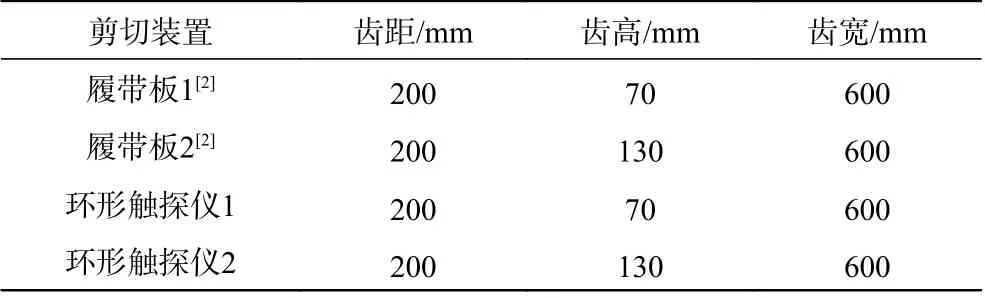
表2 剪切装置尺寸对比Tab. 2 Size comparisons among shear devices

图7 剪切装置Fig. 7 Shear devices
根据文献[2]模型试验土体参数所选用的摩尔库伦本构关系,数值模拟时不出现软化现象。数值模拟获得剪切曲线的方式是:在环形触探仪上设置参考点并绑定获取其在剪切过程的扭力矩,然后代入剪应力换算公式[4](式(1))得到相应剪应力,进而获得剪切曲线。

式中:τ为剪应力;M为扭力矩;r0为 外环半径;r1为 内环半径;h为齿高。
从图8可见:第1组,履带板1试验获得的峰值剪应力和相应剪位移分别约为2.8 kPa和25 mm,环形触探仪1数值模拟在相同剪位移处获得的峰值剪应力约为3.1 kPa;第2组,履带板2试验获得的峰值剪应力和相应剪位移分别约为3.5 kPa和30 mm,环形触探仪2数值模拟在相同剪位移处获得的峰值剪应力约为3.7 kPa。由于环形触探仪数值模拟扭转剪切时土体破坏面不规则,致使实际测试到的剪切面积比环的投影面积偏大,按式(1)换算后导致剪应力偏大。但两组数据的误差在10%以内,可验证环形触探仪数值模拟剪切过程的可行性。
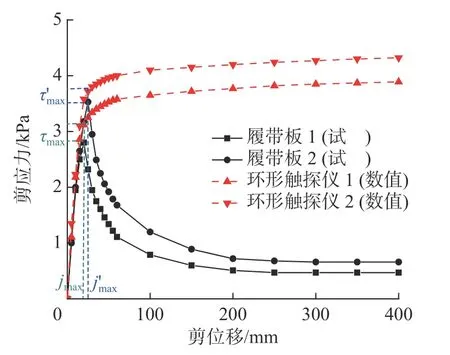
图8 剪切过程曲线的对比验证Fig. 8 Comparisons and verifications of shear process curves
通过上述压陷、剪切过程的验证和对比分析可以确定,环形触探仪能完成履带-软黏土相互作用连续过程的模拟。同时,与传统压陷装置相比,环形触探仪更为真实地还原了履带及其履齿对软黏土海床的压陷作用,类似“桩基”作用的履齿对压陷曲线的贡献不可忽略;与传统剪切装置相比,环形触探仪在避免“末端效应”和 “应力集中”等试验缺陷的同时,建立了压陷过程和剪切过程的联系,是对两个连续作用过程的合理复现。
3 履齿结构参数敏感性分析
由上述验证分析可知,环形触探仪是研究履带-软黏土相互作用的可靠仪器。同时,验证过程表明齿高、齿距等履齿结构参数对剪切曲线的贡献不可忽略,而履带驱动力主要来源于履齿对软黏土的剪切作用。因此,剪切过程中如何充分发挥软黏土的强度使履带获得尽可能大的剪应力十分重要。本节将基于环形触探仪,探究履齿结构参数齿高、齿距如何影响软黏土强度的发挥。
地面力学中,基于数量可观的现场测试数据,大致分为3种土体类型的剪切曲线及其对应的拟合函数[8]。3种剪切曲线的拟合函数如式(2)、(3)、(4)所示,分别对自变量求偏导,发现共同点是峰值剪应力τmax、峰值剪应力 τmax所对应的剪切位移Kw都与剪应力τ成正相关,而τ直接决定履带牵引力大小。因此,通过建立履齿结构参数与τmax、Kw的关系,进而建立履齿结构参数与剪应力τ乃至驱动力的联系,来探究履齿结构参数对软黏土强度发挥的影响。


式中: τmax为最大剪应力;j为剪切位移;K为剪切位移参数;e为自然对数的底;Kw为 最大剪应力τmax出现时的剪切位移;Kr为 残余剪应力τr与最大剪应力τmax的比值。
海床浅层软黏土的受力过程中存在挤密压实的现象,而修正剑桥模型能较好地表征海床软黏土的应力应变特性[12]。因此,基于修正剑桥模型进行环形触探仪数值模拟,研究履齿参数与 τmax、Kw的关系。模型参数参考House等[13-14]模拟海床软黏土所测得的高岭土试验数据,具体如表3所示。

表3 海床软黏土模拟参数Tab. 3 Simulation parameters of seabed soft clay
3.1 对齿高的敏感性分析
分析齿高敏感性的方法是,选择有相同齿距(200 mm)、不同齿宽( A、B、C类环形触探仪的齿宽分别为200、400和600 mm)的环形触探仪做数值对比,每种类型单独控制齿高为变量。通过数值模拟,得到环形触探仪齿高分别与τmax、Kw的关系曲线(图9)。
从图9可以发现:初始阶段,峰值剪应力随齿高的增大而迅速增大,随后趋于平缓,说明在50~150 mm范围内增大齿高会显著提升峰值剪应力τmax,超出这一范围后增大齿高影响将减弱;τmax出现时对应的剪切位移Kw与齿高基本呈线性递减关系,即Kw随齿高的增大而小幅减小,维持在20~30 mm。
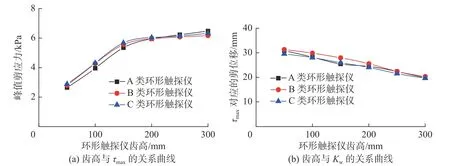
图9 齿高与τ max 、Kw的 关系曲线Fig. 9 Relationship curves between grouser height and τ max or Kw
3.2 对齿距的敏感性分析
分析齿距敏感性的方法是,选择有相同齿高(130 mm)、不同齿宽( E、F、G类环形触探仪的齿宽分别为200、400和600 mm)的环形触探仪做数值对比,每种类型单独控制齿距为变量。通过数值模拟,得到环形触探仪齿距分别与τmax、Kw的关系曲线(图10)。
从图10可以发现:环形触探仪的齿距对峰值剪应力影响显著,当齿距从疏到密,τmax也随之逐渐增大,但齿距过小时,τmax反而变小,齿距在100~200 mm为佳;τmax对应的剪切位移Kw与齿距基本呈线性关系,Kw随齿距的增大而增大,维持在15~35 mm。

图10 齿距与τ max 、Kw的 关系曲线Fig. 10 Relationship curves between grouser interval and τ max or Kw
综上,通过对履带结构参数齿高、齿距分别与τmax、Kw关系的分析,得到齿高、齿距对剪应力τ及驱动力的影响,可以发现齿高、齿距对软黏土的强度发挥影响显著,适当增大齿高、缩小齿距将有助于软黏土强度的充分发挥。
4 结 语
提出一种模拟履带-软黏土相互作用连续过程的力学触探仪器-环形触探仪,其环形无端口设计消除了“推土现象”,避免了“末端效应”造成的应力集中、分布不匀等问题,而且能连续进行履带压陷、剪切这两个过程的模拟,描述上更为准确、真实。基于摩尔库伦、修正剑桥两种本构模型,结合有限元方法,验证了环形触探仪模拟履带-软黏土相互作用连续过程的有效性,并基于环形触探仪探究了履带结构参数齿高、齿距对软黏土强度发挥的影响,得到如下结论:
(1)对比验证表明,环形触探仪可以完成履带行走时连续压陷、剪切过程的模拟,而且描述上比传统贝氏仪技术更加准确、合理。
(2)相对于压陷平板,环形触探仪履齿所发挥的“拢聚作用”会限制软黏土的塑性位移进而提高软黏土的承载力,其对压陷曲线的贡献不可忽略。
(3)相对于履带板,压陷过程使履带下方的软黏土存在一定的压实,环形触探仪对两个过程的连续性模拟较好地体现了这一特性。
(4)齿高、齿距这两个敏感履齿结构参数会显著影响履带剪切过程中软黏土强度的发挥。适当增大齿高、缩小齿距将有助于履带剪切过程获得更大的剪切驱动力,但齿高过大、齿距过小则意义不大。
环形触探仪可以较好地复现履带-软黏土相互作用连续过程并获得相关力学参数,未来可将其搭载于遥控无人潜水器或海床触探系统上进行海床原位力学测试,促进对软黏土海床床面行走预测的研究。