空基回收无人机头部扰流场CFD仿真与分析
2022-10-29陈嘉李雪兵徐忠楠邢卓琳苏子康
陈嘉,李雪兵,徐忠楠,邢卓琳,苏子康
南京航空航天大学,江苏 南京 210016
目前,受空中加油的启发,空基回收方案主要有拖曳浮标对接式回收和机械臂抓取式回收两种。其中,缆绳拖曳回收方法凭借安全性高、设备简单等优点已被美国“小精灵”项目采用并完成第三阶段演示验证[4]。但由于柔性缆绳——浮标在空中稳定性较差,对接过程易受气流扰动的影响[5]。同时,近距对接过程中,无人机头部扰流场对拖曳浮标存在显著的干扰作用,进一步影响空中对接安全和效率[6-7]。因此,为提高空中对接精度,提升回收效率和安全性,分析对接过程中存在的外界扰动具有重大意义。
现阶段,针对空中对接过程中外界扰动建模与分析,国内外学者已开展了诸多相关研究。如参考文献[8]在考虑大气湍流和加油机尾涡扰动下,研究晴空大气湍流对软管锥套运动的影响。参考文献[9]分析了尾涡形成机理和运动规律,建立了较精确地考虑尾涡衰减和扩散特性的尾涡空间流场计算模型,从而研究尾涡对受油机的影响。但是上述研究均未考虑无人机头部扰流对浮标气动特性的影响。
本文针对空基回收过程中无人机头部扰流近距对浮标产生显著干扰,影响对接安全和效率的问题[10-12],运用计算流体力学(CFD)软件对其进行仿真研究,并分析其变化规律。首先,借助SolidWorks 软件对无人机和浮标进行三维建模;其次,运用CFD 软件围绕所建模型建立外流场计算域并对其进行网格划分及迭代计算;再次,模拟仿真多组浮标与无人机间典型相对位置情况下的机头-浮标附近速度场、压力场和拖曳浮标所受扰动力数据;最后,分析其随位置变化规律,实现无人机头部扰流特性与影响的仿真与分析,其流程如图1所示。
1 无人机与浮标模型
为使建立的模型更为准确并符合实际,以确保气动分析的有效性,本文采用SolidWorks 软件对无人机和浮标进行三维建模。
所选取的浮标模型长约0.83m,直径为0.5m,而待回收无人机模型参考了美国的“小精灵”无人机[13]。值得注意的是,与常规无人机不同,“小精灵”无人机机腹为平面而非曲面,并且其机翼安装于机腹,因此在相同情况下,其升力小于普通飞机,机身周围所产生的气流也与其他飞机不同,所以其头部扰流与常规飞机有着明显差异。为了便于数值计算与分析,仿真前需统一SolidWorks 及CFD 软件内参考坐标系,即规定坐标原点位于飞机模型机头中心,z轴正方向指向机尾,y轴垂直向上,x轴指向机身左侧,其方向满足右手定则,如图2所示。图3给出了无人机与浮标在对接过程中的三维模型图。
2 网格生成
本文采用有限元分析方法研究无人机头部扰流,需要对模型进行网格划分[14-16]。首先,将所建无人机和浮标模型导入ⅠCEM CFD 网格划分软件,并围绕模型建立外流场计算域[17-18],进而设置外流场属性,以机头方向为流体入口,机尾方向为流体出口。然后,针对计算域进行非结构网格划分。值得注意的是,为了能充分体现出无人机头部扰流的影响范围,本文设置外流场计算域为一个较大的立方体。同时,由于浮标尾翼的存在,在进行网格划分时需要对其进行加密处理,以提高网格整体质量。图4和图5分别为浮标在待回收无人机前上方1m 时无人机与浮标以及外流场的网格划分结果。从图中可以看出在机身与浮标附近的网格较其他区域更为密集。
3 流体力学计算及分析
3.1 流体力学计算
本文选用具有丰富物理模型、强大解算及前后处理功能,并在航空航天领域有着广泛应用的Fluent 求解器对所划分网格进行有限元分析。图6为网格划分后无人机与浮标模型在Fluent求解器内的图形显示效果。
现今许多消费者,对于食品的第一次接触往往并不是口感,而是包装所给予的视觉冲击。不可否认,许多延续传统包装的食品往往会给消费这一种怀旧的情感,并且在市场中也有许多消费者对于某一种类食品只认一个包装。但是随着经济的发展与人民群众生活水品的提高,消费者对于食品越来越挑剔,而这时,一个好的包装往往能够让某一新产品或需要升级的产品得到消费者的青睐。
由于边界条件设置为理想气体,入口边界来流速度为90m/s,远低于声速,不用考虑流体压缩性的影响,因此,选择绝对速度格式的压力基求解器。同时,本文所采用的湍流模型为工业流动计算中使用最为广泛的雷诺平均N-S模型。而求解模型则选取适用于航空领域的SSTk-ω模型进行求解计算,其k方程和ω方程可以参见参考文献[19]。
在完成上述参数设置后,可根据具体研究需求设置监视目标和残差收敛值,以直观地观察计算结果。由于本文重点研究无人机机头部分气流对浮标的影响,仅需对机头部分以及浮标位置进行分析即可,因此,主要监测对象为浮标的阻力、升力及速度场。为了让计算结果更精确,将残差收敛值设置为0.00001。最后将历史数据初始化后,根据实际需要选择迭代次数即可得出结果。
3.2 仿真结果及分析
(1)单独浮标气动仿真与分析
为了研究无人机头部气流扰动对浮标气动特性的影响,本文不仅研究了单独浮标的流体力学,而且针对相对位置不同的无人机与浮标进行了7 组对比试验,以研究位置变化时无人机头部扰流对浮标的影响。首先,在给定常值风下,考虑浮标与无人机距离较远的情况,此时浮标不受无人机头部扰流的影响,只需单独对浮标进行计算流体力学的分析。图7 和图8 分别给出浮标yz平面的速度矢量图和速度云图。
从图7和图8可以看到浮标表面速度快而尾部流速慢,并且浮标尾部形成的涡流区流速进一步降低。图9为浮标外围压力云图,浮标头部迎风处为正压区,浮标表面处于负压区。
图10 和图11 分别为浮标的升力和阻力曲线。从图中可知,在迭代计算60次后阻力收敛至240N附近,而升力收敛至2N附近。产生此现象是由于常值气流迎角为0,使得浮标上、下表面的气压相等,其符合实际情况。
(2)无人机—浮标气动仿真与分析
考虑到在实际空基回收过程中,由于缆绳易受气流影响,会使浮标出现在无人机的任何位置,因此,在不改变仿真条件的情况下,本文挑选了7组典型相对位置,即以无人机头部中心为原点,浮标分别位于无人机的正前方、前上方、正上方、后上方、左前方、正左方以及左上方,具体的坐标见表1。
根据表1 中典型相对位置分别进行7 组对比试验以分析无人机头部扰流对浮标气动力的影响,由于浮标和待回收无人机是轴对称体,因此,右侧气动数据与左侧应保持一致,故本文仅从左侧选择三个典型位置。
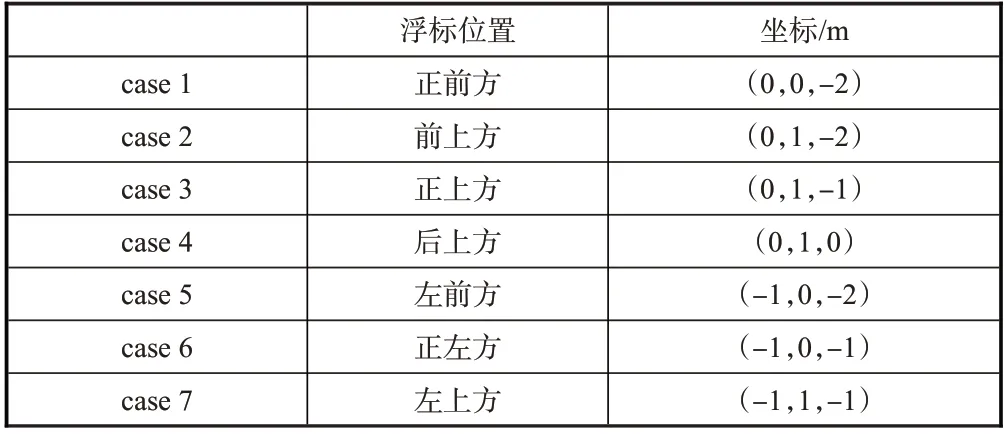
表1 无人机—浮标典型相对位置Table 1 Typical relative position of UAV-drogue
接下来本文以浮标位于坐标(0,1,-1)处为例,即case 3,详细分析头部扰流对浮标气动特性的影响。图12为case 3外流场计算域网格划分的结果。
为了提高网格划分质量,本文对无人机和浮标进行了网格加密。通过网格质量报告可知,本模型的绝大部分网格都满足求解器的要求,质量小于0.3的不合格网格数只占了不到0.08‰,这说明网格划分的结果很好。
图13 和图14 分别为case 3 处受无人机头部扰流影响的yz面速度矢量图和速度云图,将其与图7 和图8 进行对比,可以发现当浮标处于无人机正上方1m 处时,由于常值气流受无人机头部影响,气流方向发生改变,产生斜向上高速气流作用于浮标两侧。从速度云图上看,浮标两侧流速要高于其他区域,这从侧面印证了速度矢量图中高速气流所流向的区域。
图16 和图17 分别是在无人机头部扰流影响下的浮标升力和阻力曲线。从图中可知,在迭代计算60次后浮标升力收敛至104N 附近,而浮标阻力收敛至417N 附近。进一步将未受无人机头部扰流影响的浮标升力和阻力与其进行对比,发现升力和阻力都有大幅上升。
根据速度矢量图(见图7 和图13)分析可知,之所以升力和阻力产生大幅变化,是因为原本在常值风下,风向正对浮标没有迎角,浮标的升力几乎为0,而在受无人机头部影响之后气流方向发生改变,斜向上高速气流不仅为浮标提供了一个迎角,而且提供了向上的力,因此,增大了浮标的升力。同样地,原本仅存在正对浮标的气流阻碍浮标前进,但此时斜向上气流在提高升力的同时也阻碍了浮标前进,提供了水平分量使其阻力大幅上升。
通过以上分析发现,无人机头扰流场与浮标间的确存在耦合动力学作用。因此,为了能进一步分析无人机头部扰流对浮标的影响,此处以case 5 和case 6 情况下的速度矢量图和速度云图进行对比,探究无人机头扰流场与浮标间的耦合动力学作用随位置的变化规律。由于case 5和case 6情况下浮标与无人机不在同一垂直面上,因此,图18、图19与图20、图21分别给出case 5和case 6的xz面速度矢量图及速度云图。从图18 和图19 上看,在case 5 情况下,即浮标位于无人机左前方时,无人机头扰流场受范围限制,高速斜向气流并未直接作用于浮标上,浮标受头扰流场的影响较小。从图20 和图21 上看,在case 6 情况下,即浮标位于无人机正左方时,无人机头部的高速斜向气流正好作用于浮标尾翼对其产生影响,具体气动参数见表2。
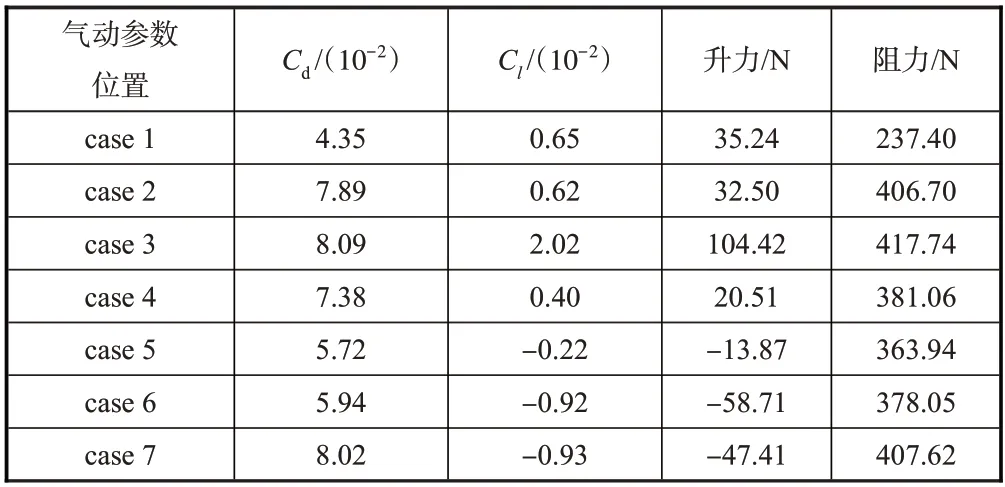
表2 不同位置下头扰流场对浮标扰动力分析Table 2 Analysis of bow wave disturbing force on drogue at different positions
对比case 5和case 6可知,浮标与无人机处于同一水平高度,此时斜向气流的垂直分量并未有效作用于浮标,而是使浮标产生负升力,并且水平分量使浮标阻力增大。此外,从case 5 到case 6,即浮标从左前方移动到正左方时,缩小了与待回收无人机机头间的距离,进一步增大了阻力。综上,得出结论:浮标越接近头扰流场,所受气动影响越明显,气动参数变化越大。
4 结论
通过研究,可以得出以下结论:
(1)本文借助SolidWorks 软件对无人机和浮标进行三维建模并对单独浮标及受头部扰流场影响下的浮标进行CFD 仿真,阐述了无人机头部扰流场特性及其在不同典型位置处对浮标的气动力干扰影响。
(2)针对空基回收过程中无人机头部扰流对浮标的影响进行了仿真和分析,得出浮标越接近头部扰流场,所受气动影响越明显,气动参数变化越大的结论。
(3)若在缆绳拖曳控制中将无人机头部扰流作为扰动并考虑在对接控制中予以前馈补偿,可以提高对接控制的精度与成功率,下一步将在拖曳式无人机空基回收对接控制中进行重点研究。
