一种用于纯电动客车的双闭环定速巡航控制系统
2022-10-29刘逸群张利新郑志敏明杰婷
刘逸群,张利新,郑志敏,孙 炜,明杰婷
(中车时代电动汽车股份有限公司,湖南 株洲 412007)
定速巡航系统(CCS)是指在一定的车速范围内,驾驶员不用控制加速踏板而能够使汽车保持设定速度行驶的控制系统。定速巡航系统有效地减轻了驾驶疲劳,提高了驾驶的便利性、舒适性、经济性。由于纯电动客车由电机驱动,对控制的稳定性和精度要求更高,而传统PID控制算法需要一定的标定工作,且控制精度相对较低,响应时间较长,无法有效地满足纯电动客车CCS的控制需求。
本文通过对纯电动客车定速巡航控制原理的研究,设计一种基于双闭环控制策略的定速巡航系统,并通过搭建的Cruise/Simulink纯电动客车联合仿真平台和实车工况验证所设计系统的稳定性和有效性。
1 双闭环定速巡航控制系统
1.1 双闭环定速巡航控制系统组成
双闭环定速巡航控制系统架构如图1所示,主要由外部输入、巡航控制策略和MCU控制组成。外部输入包括巡航设定车速、加速信号、制动信号、实际车速、实际加速度。巡航控制策略采用由速度转化环和速度调节环组成的双闭环结构,其中速度转化环将速度信号转化为加速度信号,速度调节环将加速度信号调节为扭矩信号。MCU控制根据巡航控制策略算出的车辆需求扭矩控制电机的巡航扭矩,进而控制车速。该双闭环中的速度转化环可以有效提升汽车巡航控制的反应速度,速度调节环能够调节速度变化率,使得输出扭矩更为快速、准确地接近稳定值,从而快速、准确、稳定地实现巡航车速。
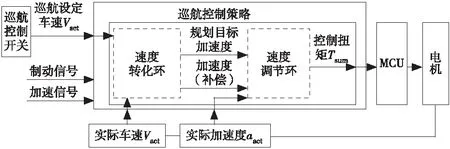
图1 双闭环定速巡航控制系统架构
1.2 双闭环控制策略设计
1.2.1 传统单环控制策略
定速巡航的传统单环控制策略如图2所示,由单一的速度偏差作为输入,输出为踏板开度,根据踏板开度和驱动扭矩的关系,通过大量的标定得到被控车辆的经验扭矩。汽车在巡航过程中具有时变非线性特性,其力(力矩)平衡方程中包含有速度和加速度两个运动特性。单一的速度变化与车辆控制扭矩并不成线性关系。因此,传统单环控制对于复杂工况下的巡航控制存在缺陷:当车速不断变化时,PID 控制器中的积分控制环节会导致系统产生较大的超调,甚至导致产生较大的扭矩震荡,从而无法满足对巡航扭矩控制的要求。

图2 传统单环控制策略
1.2.2 双闭环控制策略总体方案
为了应对汽车在巡航过程中的时变非线性问题,本文设计了双闭环PID控制策略,同时考虑速度和加速度两个因素的影响,以更为准确地描述车辆的运动状态,从而实现更稳定、更灵敏的定速巡航控制。策略方案如图3所示。
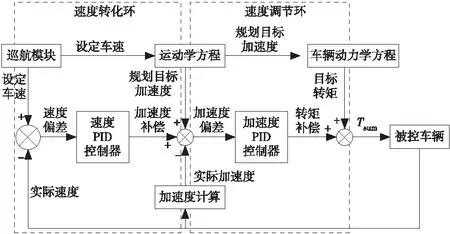
图3 双闭环PID控制策略方案
速度偏差经过速度转化环输出的不再是踏板开度,而是速度PID控制器输出的与扭矩强相关的加速度补偿值,同时通过设计速度不满度因子对运动学方程计算的目标加速度进行调节与修正计算,得到对应设定车速的目标加速度。速度转化环输出的加速偏差作为速度调节环中加速度PID控制器的前馈输入,得到扭矩补偿,同时速度调节环根据车辆运动学方程和目标加速度值计算车辆的目标扭矩,通过将转矩补偿值和目标转矩融合,使车辆所获得的控制扭矩更为准确。传统的单环控制策略需要根据踏板开度与扭矩的线性关系去标定,该双闭环策略减少了大量标定工作。两个环组成一个闭环控制系统,有效地避免了单环PID控制产生较大超调量的缺陷,从而确保被控车辆巡航速度的稳定性、及时性和准确性。
1.2.3 速度转化环控制策略设计
速度转化环控制策略设计主要有两部分。
1)速度PID控制器策略设计。速度PID控制器采用PI控制,其输入为目标车速与实际速度的一系列的速度偏差信号。
()=-()
(1)
速度偏差()的正负值决定输出的加速度(补偿)的正负值和计算的目标加速度的正负值。
速度PID控制器关于加速度补偿()的传递函数可以写成

(2)
式中:为比例系数,适当调大可以提高响应速度,过大则会放大噪声,且导致控制器输出饱和,影响系统的稳定性;为积分系数。
由于CAN总线采集的数据是按周期进行离散的,因此需要进行时间间隔的离散化处理:
()=·()+

(3)
式中:()为速度PID控制器输出的加速度(补偿)值,为周期时间的间隔数。
2)目标加速度计算。目标加速度值为驱动、制动时二者的综合值,计算公式见式(4)。其中、为权重分配系数。
=+
(4)
① 若()≥0,则是正值的驱动目标加速度,此时、的计算公式见式(5)和式(6)。
···=
(5)
···=
(6)
式中:为当前采样时刻的驱动加速度;为当前转速下的最大驱动加速度;为整车质量;为传动比;为主减速比;为滚动半径;为电机效率;为采样时刻的电机扭矩;为当前转速对应的电机外特性最大扭矩。
② 若()<0,则是负值的制动目标减速度,此时、的计算公式见式(7)。
=-0177,=Δ
(7)
式中:Δ为当前时刻速度与上一时刻速度的速度差;为重力加速度,取9.81 m/s。
为使计算的目标加速度更为准确,设计速度不满度因子来表征驾驶员对速度需求的满意度。第个采样点的当前车速的速度不满度因子()的表达式为
()=(-)
(8)
速度不满度因子越大,驾驶员期望获得的目标加速度就越大。而=+,由于权重系数+=1,>,因此,为使得增大,此时应提升的占比,即增大,而适当减少的占比,即减小,从而调高的值。当车速达到目标车速后,()相应清零。
1.2.4 速度调节环控制策略设计
速度调节环控制策略设计包括加速度PID控制器策略设计和目标扭矩计算。
1)加速度PID控制器策略设计。采用PID控制,其输入为速度转化环输出的加速度补偿()、目标加速度以及车辆运行实际加速度三者的加速度偏差():
()=()+-()
(9)
因此,相应扭矩补偿()的函数可写成

(10)
式中:、、分别为比例、积分、微分系数。
同样,将()离散化为加速度PID控制器输出的扭矩(补偿)值():


(11)
2)目标扭矩计算。根据车辆动力学方程,目标扭矩有:
···=
·+··2115+··
被控车辆的总控制扭矩为
=()+
(12)
>0则车辆处于加速状态;=0,则车辆处于定速巡航状态;<0则车辆处于减速状态。
2 联合仿真分析与实车应用
2.1 仿真模型建立
根据现有的一款10.5 m纯电动客车参数、电机参数、电池参数在Cruise中分别建立其模型,在Simulink中建立电机控制模型;再通过Cruise提供的外部接口连接Cruise整车模型和Simulink电机控制模型,建立起纯电动客车的联合仿真模型,其架构如图4所示。
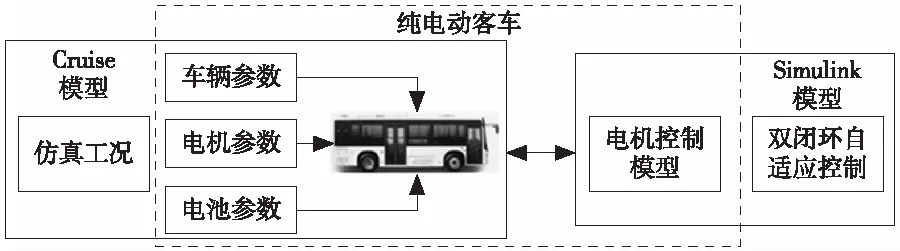
图4 纯电动客车联合仿真模型架构
Cruise整车模型和Simulink模型的输入输出参数如图5所示。
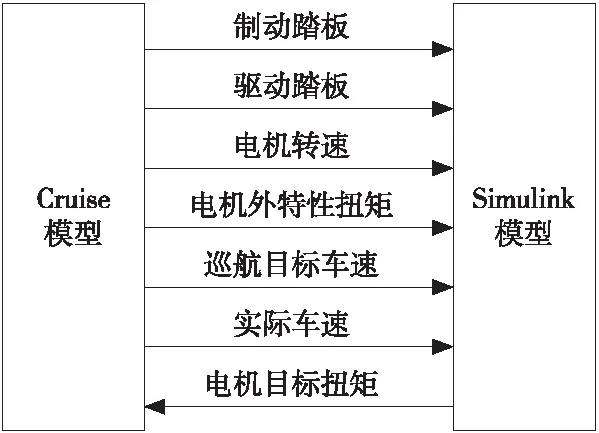
图5 Cruise与Simulink交互参数
2.2 仿真对比分析
在Cruise软件中建立路谱数据,设置采样时间间隔为0.02 s,电机采用目标扭矩控制模式,车辆半载,外部连接方式为Interface方式。在Simulink中进行联合仿真,并与传统PID控制方式的仿真进行对比,设置定速巡航速度为60 km/h,并与传统PID控制方式进行对比。自设路谱工况仿真结果如图6所示。
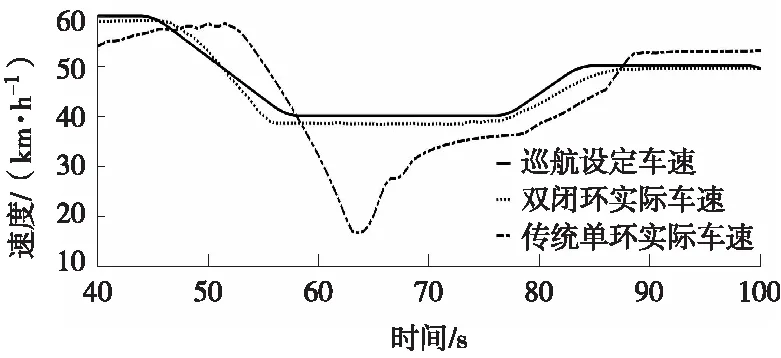
图6 自设路谱工况算法效果仿真图
1)车辆在起步后40 s进入车速为60 km/h的定速巡航模式。40~44 s为水平路面巡航路况,双闭环控制策略的车速始终能够保持稳定;而传统单环PID控制的车速控制误差较大。
2)巡航车速逐步设定为40 km/h,增加8%的坡度设置。在58 s后进入40 km/h定速巡航阶段,双闭环控制策略的车速能够稳定在40 km/h,实现速度的快速跟随;而传统单环PID控制的车速发生超调现象,无法实现车速稳定功能。
3)77 s后,将巡航车速逐步设定为50 km/h,继续保持8%的坡度设置。在84 s后进入50 km/h定速巡航阶段,双闭环控制策略的车速稳定在50 km/h,误差小;而传统单环PID控制的车速误差较大。
2.3 实车试验效果
试验样车与仿真对象相同,采用双闭环控制策略,道路为平直干燥路面,车辆半载。实车在42 s时启动了定速巡航模式,巡航车速从13 km/h通过手动设置逐步增加到18 km/h,然后逐步减小到8 km/h,该过程中实际车速能够迅速响应,并且能够实现小段速度调节,实际速度呈梯度变化。设置在8 km/h、10 km/h、14 km/h的定速巡航保持阶段,实际速度跟随设定变化,误差小,能够实现车速的准确跟随和快速稳定。实车试验结果如图7所示。
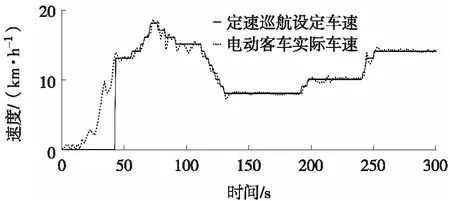
图7 实车试验工况
3 结束语
针对纯电动客车扭矩控制的特点,设计了一种由速度转化环和速度调节环组成的双闭环控制策略的定速巡航控制系统。通过Cruise/Simulink联合仿真和实车试验结果表明,相比于传统单环PID巡航系统,该双闭环定速巡航控制系统响应速度快,抗干扰能力强,具有良好的适应能力及较高的控制精度。
