大型绞吸式疏浚船在受限水域施工工艺
2022-10-28王昭
王 昭
(中国水利水电第五工程局有限公司,四川 成都 610021)
0 前 言
耙吸船在作业过程中,因运行航道设计存在多样性、流域环境具备复杂性,使施工人员在实际作业过程中会面临各种意想不到的突发情况。对于大型耙吸船,因作业区域有限,其施工难度较大,同时安全风险系数也会增大。作业区域按其类型的差异性可细分为河道多侧受限制、河道单侧受限制。传统的解决方法是使用小型耙吸船完成施工,结合实际情况,船舶资源紧缺,加之受限区域一般都是施工工期紧张河段,所以如何高效完成疏浚任务是施工单位所需要尽快解决的重大问题。
1 工程概况
本文以沙特萨拉曼国王国际港务综合设施项目为研究对象,该项目绞吸式疏浚船施工应用范围为以下内容。
1)疏浚工程:2#及4#、5#干船坞的疏浚工程:2#干船坞的疏浚开挖底部高程为-10.2 m CD底部高程,4#、5#干船坞的疏浚开挖高程为-8.7 m CD,通过液压泵直接处理到绞吸船3 km和围堰内测的堆场。
2)2#干码头围堰施工。用疏浚原材料对围堰进行施工,从而达到抑制、封闭基坑的目的;使用疏浚原材料回填围堰的顶部区域,回填的宽度设计为15 m,流域沿线护坡设计为岩石砌体,岩石砌筑底部标高为-3.00 m,上部标高设计为+3.5 m。
3)4#和5#干码头围堰施工。使用疏浚原材料回填围堰的顶部区域,回填宽度设计为15 m。流域沿线护坡设计为岩石砌体,岩石砌筑底部标高为-3.00 m,上部标高设计为+4.0 m。
2 难点解析及施工组织
2.1 难点解析
1)绞吸式疏浚船的外形比较大。该项目原本设计采用的3 000 m3绞吸船,但是由于诸多方面因素的影响,原规划采用的绞吸船无法满足实际作业需求,需加快疏浚速度,需要使用5 000 m3绞吸船,绞吸船的型号为HUTA-14;一艘22 000 m3绞吸船,实际施工时使用的绞吸船长度为135 m,宽度为27 m,由于双耙可以向外延伸,绞吸船的实际宽度大概为40 m;耙吸船的吹水高度为:空载状态下的吃水高度为4.5 m,满载状态下的吃水高度为8.8 m。
2)施工水域的影响。水域中的回旋长度约为800 m,回旋宽度约为600 m,属于一个不规则的轮廓,相对而言回旋水域的面积比较小,东侧属于浅滩,最浅部位低于2 m,此外水位的梯度波动比较大距施工区域的边缘距离只有240 m;回旋水域的北侧为防波堤。
3)水域深度比较浅,分布不均匀。结合疏浚之前的勘测结果来看,施工区域的西北侧、东南侧水深比较浅,大概保持在6~8 m;其他水域的深度保持在8~9 m。其中,东南水域与浅摊的距离比较近,水深情况不是很理想,平均水深大概为2~4 m。该项目选择使用的耙吸船在轻载状态下的吃水高度为4.5 m,重载状态下的吃水高度大概为8.8 m。该水域内的潮差非常小,大概为0~1.5 m。
基于当前的码头回旋水域条件下,绞吸船的体积比较大,在风力较大的情况下不利于船只操控及疏浚工作,会导致施工难度增加。
2.2 施工组织
结合施工单位整理的数据以及现场实际情况,回旋水区域的土质大部分是淤泥,局部出现结块现象,土层中含有少量的油气,正式施工过程中,油气的浓度、流动速度都大幅度降低。受限区域的疏浚作业大致可以细分为三个阶段完成:先对中间区域进行开挖,然后开挖西北区域、东南区域,最后对浅滩河段进行疏浚。其具体情况如下所示。
1)第一阶段。①此阶段施工过程中确保施工安全,前期夜间严禁施工,保证现场作业人员对施工区域有充分的了解,不断尝试施工方法,当施工条件成熟以后,分多班同时进行施工,具体的施工方法是:结合河道水流方向进行分析,假若落水是西北角的上侧,那么应该按照顺时针顺序展开作业,反之,则应该按照逆时针顺序展开作业;②按照大角度满运行的方式进行施工,耙吸船运行的速度控制在1节左右;③耙吸船上线以后,将溢流井放至最低位,施工至水深比较理想区域以后,将溢流井适当提高,强化装舱的效果。
2)第二阶段。西北区域与东北区域可以按照第一个阶段施工方法完成布线作业。耙吸船按照顺倒车浅扫方式进行作业:①在每日高平潮期间将耙吸船移动至施工区域内,疏浚过程中将耙吸船缓慢地移动至码头附近,耙吸船运行速度保持在0.5节左右;②回转至回旋水区域,多次循环作业。对于东南区域的死角而言,可以沿着码头方向顺倒车上线,耙吸船的头部航行至泊位以内,促使耙吸船可以对死角区域进行疏浚。
3)第三阶段。因DT/DC-MNB-29区域与浅滩之间距离比较近,所以存在一定的施工难度,这部分疏浚任务可以最后完成,施工区域内最大水深未超过4 m,最小水深只有1.33 m;该区域内的土质基本上都是淤泥,具体的施工方法为:①浅滩附近不需要做放耙处理,保证3根管处于水平状态,泥泵运行以后进行旁通,运行速度保持在10 m/s,借助旁通水对浅滩进行冲刷;②当水深条件改善以后,开始放耙疏浚,疏浚之前先完成抽舱作业,利用舱压促使耙吸船处于平吃水状态;③扫浅疏浚过程中将外挡耙放下,中间管始终处于水平状态,同时保证施工安全。
3 大型绞吸船在受限海域施工工艺
3.1 疏浚工程
3.1.1 工作原理
2#干船坞疏浚作业。可以使用切割机洗泥器完成,疏浚至设计标高部位,需要适当加快施工进度,缩短施工工期,所以需要对以下内容进行优化。
1)加快对干码头坑的疏浚作业的效率,应该将其作业时间控制在常规性土方开挖作业时间的50%。
2)加快围堰施工的进度,提高施工效率。
3)加快排水系统的安装时间,提高排水系统部署的合理性,当围堰施工完成以后立即对排水系统进行施工。
4)因该项目减少了围堰内的开挖工程量,有效地降低维护期期限。
5)因挖泥器由海边深入至海底,然后开始对船坑进行疏浚,所以可以降低基坑内的抽排水量,只需要将码头排水水量至当前标高部位即可。
3.1.2 施工顺序
1)疏浚作业施工前进行勘测。在疏浚作业开始前需要对作业区域进行勘测,测量出疏浚区域的底部高程等数据。疏浚完成后,需要对水深进行复测,并定期检查[1],以保证底部高程满足后期的大型船只施工和通航要求。
需要对疏浚区域的边界进行标定。水深、水文条件检测的频率确定为一天一次,严格控制每日工作进度,保证疏浚工程满足施工合同要求,尽可能缩短施工工期。使用多梁容器进行检测,保证疏浚作业的全部工程量均按照施工合格完成,同时保证疏浚的质量符合设计要求。
2)潮汐读数。在实际调研时,必须要严格地按照现行管理规范进行,在固定的时间段内记录潮汐读数。将检测仪器装置在水域内,保证检测仪器不会受到损坏,检测的时间阶段定为:疏浚作业前期调研、疏浚作业完成后的调研、控制调研、疏浚作业过程中。具体的检测顺序主要是由现场施工条件进行确定,其会对最终的潮汐读数精准度造成巨大的影响。绞吸船可结合水域的实际情况配备必要的辅助工具。
3)施工方法。施工必须要严格地按照施工进度、施工方案及标准顺序展开作业,以保证整体施工工期不会受到影响。
疏浚工程的作业流程为:①挖泥船由40 m至-6 m的疏浚水域驶入干式码头范围内,确保疏浚船顺利通行;②2#干码头可使用挖泥设备完成疏浚,单次疏浚的规模应该为-10.2 m CD;③4#干码头、5#干码头使用挖泥设备完成疏浚,挖泥区域开挖的深度最大应该为-8.70 m;④码头与围堰之间接口区域全部使用自卸汽车进行回填,围堰的坡度确定为1∶ 6;⑤疏浚的高度控制在基准位0.5 m以内,沿着围堰两侧开始二次疏浚作业;⑥疏浚作业的公差确定为-0.00/+0.50 m,以保证开挖深度符合设计要求;⑦当码头出入口区域疏浚作业完成以后,最后的40 m区域可使用卡车进行回填。
3.2 围堰施工
3.2.1 工作原理
围堰的斜坡及标高需严格按照设计图纸施工。围堰内的施工基坑设计常年排水系统,保证干船坞处于干燥作业环境下施工。
3.2.2 施工顺序
1)借助输送泵对围堰进行填筑施工。
2)剩余原材料由挖泥船负责清理,坡度设计为1∶ 3。
3)最后对围堰顶部进行平整、压实处理。
4)使用长臂反铲对多余材料进行修剪,保证提高围堰的外部质量。
5)使用长臂挖机吊装土工布,聘请专业潜水员严格地按照设计图纸将土工布铺贴至指定位置。假若土工布出现破损现象,通过使用多余土工布将破损土工布做覆盖处理,以保证土工布施工满足设计要求。
6)自卸车沿着测量放线路线将护坡材料运输至围堰顶部和马道位置。
7)使用长臂反铲对护坡料进行修整,确保围堰的坡度与水平满足设计要求。
8)使用长臂反铲对护坡料进行修整,将围堰修整成设计图纸要求的外形。
3.3 绞吸式疏浚船
CSD属于一种高性能的绞吸式疏浚船,这种类型的疏浚船内置旋转刀具。在实际进行疏浚作业时,CSD应位于锚固线上。CSD主要应用在疏浚岩石、淤泥、砂子、黏性土基础中。疏浚的流程为:使用旋转刀具切割海底、使用疏浚泵转运泥水混合物。部分CSD自身具备推行功能,其他CSD则要外部作用力进行拖拽移动。绞吸式疏浚船(CSD)总平面图如图1所示。
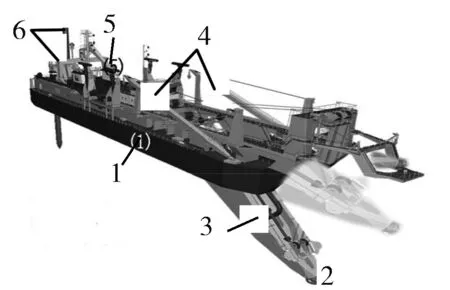
图1 绞吸式疏浚船(CSD)总平面图
CSD的结构组成包括以下六部分:一为船体,主要包括:发动机、输送泵、控制仪器等;二为绞刀架,主要包括刀头、管道、挖泥泵;三为排放系统,管道及疏浚泵;四为销棍、支架,为船体提供稳定的支撑力;五为锚、侧绞车,为船体提供侧向作用力;六为桩桩。
3.3.1 CSD定位
在进行疏浚作业之前,CSD依靠自身航行至指定部位。CSD利用两侧的线来不断地调整自身的位置。当工作销棍或是主钻头落放至海底以后,可以固定在船尾。在实际疏浚时,CSD会完成以后旋转动作。主钻附近移动:主要是为了形成移动需要的作用力,CSD绞刀架两侧需要装置锚,使用钢丝绳与绞车完成链接。
CSD的销棍可细分为2个定位桩:作业过程中或是在车厢内安装主定位桩时,可以适当地做向前移动船体或是向后移动船体。实际步进距离主要是受到土壤条件的影响,每一个步骤都必须保证完成一次新的切割。具体的作业流程如图2所示。

图2 CSD切割流程图
当闸板处于完全外延状态时,即外延长度为4~6 m,疏浚船移动至中心线位置,当疏浚船进入到这个位置以后,CSD则会自动开斗,同时缩回液压板,将开斗移动至启动部位。当开斗移动至指定部位以后,则会将工作定位桩缓慢地落下,在这个过程中辅助定位桩则会缓缓升起,开始进行疏浚作业。
3.3.2 疏浚CSD
为保证疏浚作业顺利开展,操作者应该降低切割机的吊梯。促使刀头开始旋转,对海底部位的土壤进行疏松处理。抽吸口位于刀具头部。疏松后的土壤与水由输送泵排出。
沟槽边坡可以根据刀头的边坡角度开始疏浚作业。在对河道或是沟槽进行疏浚时,需要关注边坡自身的稳定性。边坡的稳定性其实就是土壤特性函数,在对边坡进行设计时,需要着重关注此方面内容。在疏浚过程中,需要定期进行检查,确保疏松线路始终位于正确路线上,同时核算出疏浚工程量。
3.3.3 排放CSD的工作方法
结合施工方案来看,疏浚材料与抽水全部都是利用疏浚管道输送至指定区域内。
3.3.4 排放至废物处置储存区
岸边与洗泥器之间使用疏浚管道进行连接。管道结构组成比较简单,主要是由海面浮动管道与陆地管道构成。疏浚材料尽可能地放置在临近存储范围内,尽可能地缩短洗泥器与抽水点之间的距离。
3.3.5 设备定位
差分全球定位系统的核心作用是控制挖泥船的位置及定位功能。其可以为挖泥船提供高精准度的定位,地面办公室需要每天记录疏浚工程量。定位系统运行过程中的控制方法如下。
1)利用深度切割指示器、摆动指示器、潮汐观测表对疏浚的深度、宽度进行检测管控。
2)利用计算机控制疏浚的轮廓。控制系统为挖泥船提供一个精准的控制过程。施工现场可以通过临时标记的方式利用GDPS对疏浚作业进行不定时的检查,然后形成检查资料,通过对资料进行分析来判断作业的正确性。在疏浚作业开始之前,对定位控制系统进行调整,提高控制过程中的精准度。在系统运行之前,检查深度指示器的性能,确保疏浚过程中深度检查的精准度。深度是利用刀具在不同深度、水位环境下,刀具头之间的距离进行判断计算得出。潮汐观测表装置在水下安全区域内,确保潮汐检查仪器不会出现损坏现象。
4 结 语
大型耙吸船施工码头在实际施工过程中,由于受到水域的影响,导致施工难度不断增大,本文使用CSD施工技术以后,可以实现精准定位,将施工任务进行细分,通过简化施工流程、合理的部署,提高挖泥船的整体性能,逐步完成各个工序,以保质保量地完成施工任务。假若仅仅配备一条小型耙吸船,那么施工成本将非常高,导致净收益降低,无法体现出经济效益,还会导致整体施工工期不断地延长,所以,选择使用大型耙吸船进行疏浚作业比较合适。
[ID:013949]
