基于模糊滑模控制算法的分布式驱动电动汽车横向稳定性控制研究
2022-10-27邱泉
邱 泉
(上汽通用五菱汽车股份有限公司,广西 柳州 545007)
1 绪论
在环境污染和能源危机的双重压力下,节能、环保、安全是汽车发展的三大主题,掀起了发展电动汽车技术的热潮。分布式驱动电动汽车(DDEV)凭借轮毂电机驱动响应迅速,力矩独立可控且分配灵活性高等优势成为国内外研究重点。但是,DDEV是典型的过驱动控制系统,在面对外界环境干扰时,对车辆横向稳定性控制提出了更高要求。Y ZOU等人为了提高车辆横向稳定性,将状态约束和控制参考以矩阵的形式传递到MPC控制的滚动优化机制中,并采用二次规划算法分配转矩。Hasan Alipour提出改进积分滑模控制的横向稳定控制器,对滑模控制的结构进行了改进和在线调整,提高车辆系统的稳定性。田燃等人提出了将DYC控制与四轮转向结合,通过单侧制动策略将滑模控制器决策的横摆力矩进行分配,并对后轮转角进行修正。王金湘等人利用自适应滑模控制律和加权法对分布式驱动电动汽车进行分层控制,协调控制质心侧偏角与横摆角速度的优先级,获得理想的前轮转角和附加横摆力矩。
研究中不难发现,由于车辆行驶工况的复杂性以及车辆参数的不确定性,因此很难找到精确的模型来描述分布式驱动电动车运动时的动力学性能。
为了提高分布式驱动电动汽车的横向稳定性,本文提出将滑模控制结合模糊逼近用于非线性车辆控制系统中,采用模糊系统调节滑模系统的切换增益,可有效降低模糊增益。减少参数摄动以及外界环境干扰对横向稳定系统造成的影响,提高控制系统的鲁棒性。
2 车辆建模
2.1 车辆三自由度动力学模型
车辆行驶中,考虑车身纵向、横向以及横摆3个自由度,忽略车辆的垂向运动以及俯仰和侧倾,忽略风阻等外界因素,假设前后轮轮距相等,建立整车动力学模型如图1所示。表1为整车参数。

表1 整车参数

图1 三自由度动力学模型

式中:v——纵向车速;v——侧向车速;ω——横摆角速度;a——质心到前轴的距离;b——质心到后轴的距离;m——整车质量;δ——转向轮转角;I——整车绕轴Z的转动惯量;T和T——前后轴的轮距。
2.2 轮胎模型
当车辆处于极限工况时,轮胎特性呈非线性,易造成车辆失稳而导致交通事故。考虑轮胎模型的精度以及可靠性,本文选择Magic Formula轮胎模型,该轮胎模型根据实验数据拟合的轮胎模型,可精确地描述轮胎侧偏特性,其表达式如下:

式中:Y(x)——侧向力、纵向力或者回正力矩;x——侧偏角或者滑移率;C——形状因子;D——巅因子;B——刚度因子;E——曲率因子;S——垂直方向漂移。
2.3 轮毂电机模型
本文研究对象为分布式驱动电动汽车,而CarSim软件是针对传统燃油车开发的,因此需要将软件中的传动系统断开,转矩信号由MATLAB/Simulink中建立的轮毂电机给出。本文选用永磁同步电机(PMSM)作为驱动轮毂电机,可简化为一个二阶系统,将输入转矩和输出转矩关系使用二阶传递函数表示:

式中:T——需求的电机转矩;T——输出的电机转矩;ξ——电机常数,由电机特性决定,ξ取0.001。
3 车辆横向稳定控制
3.1 车辆参考模型
本文将线性二自由度模型作为车辆的参考模型,输出理想的横摆角速度。
车辆期望的质心侧偏角会受到路面附着系数的约束,极限稳态下,车辆的横摆角速度限值设为ω=0.85μg/v,则期望的横摆角速度:

3.2 稳定性判断
本文选取横摆角速度实际值与理想值的偏差Δω作为判断依据:

式中:K——横摆角速度偏差门限值,取决于车速、路面附着系数等参数。其取值如下:60km/h时,0.025rad/s;70km/h时,0.026rad/s;80km/h时,0.027rad/s;90km/h时,0.028rad/s;车速>90km/h时,0.03rad/s。
3.3 滑模控制器设计
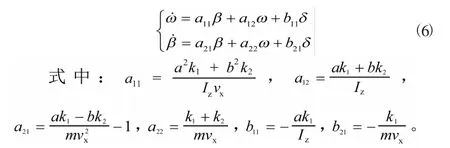
本文研究的被控系统的状态方程式可以表示为:

式中:E(t)——建模过程中系统受到的干扰。
f(W)可以由质心侧偏角和横摆角速度来进行表示:

选取滑模控制趋近律的增益值为:

式中:η为常数,且η>0。
本文选取车辆系统的横摆角速度作为控制量,利用实际横摆角速度ω跟踪理想横摆角速度ω,来控制车辆的横向稳定性。
系统的跟踪误差:

选择控制器的切换函数:

切换函数求导可得:

设计本文滑模控制算法的控制率:

利用李亚普诺夫函数对本文横向稳定性控制器进行稳定性证明,李亚普诺夫函数如下:

对式(16)的李亚普诺夫函数进行求导可得:

将控制率代入至式(17)得到:

式中:η为正数。上式恒<0,通过李亚普诺夫函数的稳定性证明,验证了本文所设计的控制器满足稳定性要求。
此时,车辆维持横向稳定性所需的附加横摆力矩如下式所示:

式中:K(t)——系统运动点的趋近切换面的速率,其值越大,趋近速度越快,响应速度也更快,但易引起系统更大的抖动,趋近项K(t)sgn(s)导致系统的抖振。
3.4 模糊控制器设计
系统干扰项E(t)为时变参数,切换增益K(t)用于补偿不确定项,为降低滑模控制的抖振,提高系统的稳定性,K(t)也应该是时变的参数。本文将模糊控制与滑模控制结合,抑制滑模系统固有抖振。如图2所示。

图2 横向稳定性控制结构图
模糊规则如下。



模糊规则如表2所示。

表2 模糊规则对应表
模糊系统的输入/输出隶属函数如图3、图4所示。

图3 模糊输入

图4 模糊输出


式中:G——比例系数,根据经验确定。


4 仿真验证
为了验证模糊滑模控制算法对车辆转向时横向稳定性的控制效果,本文基于CarSim和Simulink搭建联合仿真平台并进行车辆横向稳定性分析。在CarSim中设置双移线工况,模拟分布式驱动电动汽车高速行驶时紧急避障或超车的工况,车速80km/h,路面附着系数μ=0.8。
如图5所示,车辆在无控制情况下,前轮转向轮转向幅度大,且转速变化较快,驾驶员操作负担较大。模糊滑模控制算法减小了车辆的前轮转角,使得转向更加平缓,易于驾驶员操纵,提高了驾驶的安全性。

图5 前轮转角
双移线工况下,模糊滑模控制对分布式驱动电动汽车转向系统进行优化控制,对比无控制状态下,车辆在行驶过程中的质心侧偏角和横摆角速度的超调量大幅减少,且其误差在可接受范围内,改善了车辆的操纵稳定性。如图6所示。

图6 车辆横摆角速度和质心侧偏角图
模糊滑模控制算法决策出维持车辆横向稳定性所需的附加横摆力矩,通过二次规划算法将力矩分配,图7为各车轮的转矩。

图7 附加横摆力矩和力矩分配图
5 总结
针对参数摄动以及外界干扰对车辆稳定性造成的不良影响,本文采用滑模控制算法设计车辆横向稳定性控制器,结合模糊系统来自适应系统增益,减少了滑模系统的抖动,提高了横向稳定性控制系统的鲁棒性。通过联合仿真,验证了所提出的模糊滑模控制算法能够有效提高车辆横向稳定性,减轻驾驶员操纵负担,提高驾驶的安全性。
