海底挖沟机吊放控制系统设计
2022-10-26屠伟,徐伟,丁鑫
屠 伟,徐 伟,丁 鑫
(上海船舶设备研究所,上海 200031)
0 引言
海洋蕴藏了丰富的能源资源,海底的石油和天然气开采后,需要使用管道进行运输。海底挖沟机是海底挖沟铺管的机械设备,吊放装置是挖沟铺缆的重要配套系统,通过门架将海底挖沟机从船上移到船舷外,通过绞车将海底挖沟机放到海底,并在海底挖沟作业时提供恒定的牵引力[1-3]。
1 海底挖沟机吊放控制系统
海底挖沟机吊放装置组成见图1,主要包括机械、液压和电控系统。机械主要包括门架和绞车。门架是通过液压动力单元驱动,绞车是通过变频器驱动。控制系统主要包括配电柜、控制柜、中央操作台、现场操作台和变频柜组成。配电柜给控制系统提供电源,控制柜采集外部传感器信号,通过逻辑运算后,输出控制指令,中央控制台在驾驶室可以操作门架和绞车,现场操作台在绞车舱,用于绞车的现场调试和维修。变频柜中装有变频器,用于变频驱动绞车。
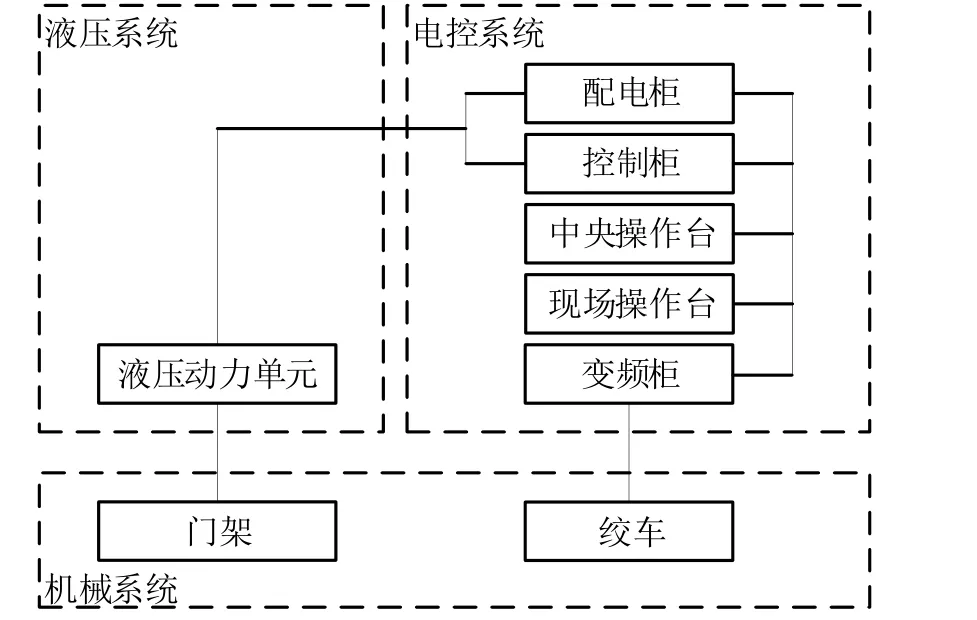
图1 海底挖沟机吊放装置示意图
2 控制系统设计
2.1 硬件设计
控制系统框图见图2,控制柜为可编程逻辑控制器(Programmable Logic Controller,PLC)主站,控制器采用西门子CPU1511-1 PN,中央操作台为从站1,屏幕为西门子的TP1200精智面板,现场操作台为从站2,屏幕为西门子的TP700精智面板,从站选用IM155-5 PN ST接口模块,变频器采用ABB FPNO-21现场总线适配器,主站、从站、变频器和HMI之间采用PROFINET总线进行通信。

图2 控制系统框图
主站拓展模块包括:1个DI 32×24VDC HF数字量输入模块,用于配电柜、液压动力单元、外部传感器等的状态检测;2个DQ32×24VDC/0.5A HF数字量输出模块,用于输出中间继电器、液压电磁阀等的驱动信号;1个AI 8×U/I HS模拟量输入模块,用于检测液压油箱温度、液位、主泵压力、绞车张力等模拟量信号;1个AQ8×U/I HS模拟量输出模块,用于输出液压比例阀的控制信号;1个TM Count2×24V工艺模块,用于测量绞车卷筒的转速。
从站拓展模块包括:1个DI 32×24VDC HF数字量输入模块,用于控制面板上操作按钮和选择开关的输入检测;1个DQ32×24VDC/0.5A HF数字量输出模块,用于控制面板上的指示灯、蜂鸣器的状态输出;1个AI 8×U/I HS模拟量输入模块,用于检测控制面板上操作手柄的模拟量指令信号。
变频器采用ABB集团的ACS880-07系列变频器,PLC主站与ABB变频器通过现场总线适配器现场总线以太网输入输出(Fieldbus Profinet IO,FPNO)进行通信,参数过程数据对象 (Parameter Processdata Object,PPO)类型选择PPO6,分配的通信地址等信息见图3。

图3 通信适配器FPNO 概况
2.2 软件设计
软件设计使用西门子TIA Portal V15.1软件,采用模块化结构设计,有利于软件开发,图4为控制系统主要功能的软件框图。主程序OB1主要包含以下功能程序块:报警功能FC10、状态功能FC20、门架功能FC50和绞车功能FC60。门架功能FC50包含电机控制FC51和液压逻辑FC52;绞车功能FC60包含绞车控制FC61、变频器通信FC62和变频器控制FC63。
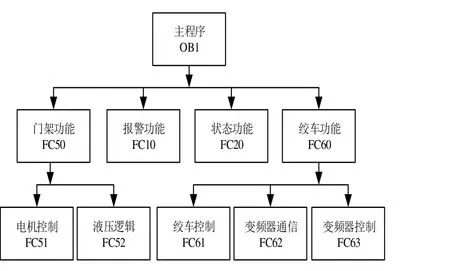
图4 软件主要功能框图
电机控制FC51含有2台主泵电机启动和停止的控制逻辑,液压逻辑FC52含有系统所有液压阀的控制逻辑时序,主要实现门架的摆出和摆入等动作。绞车控制FC61含有恒张力功能,当海底挖沟机在海底准备开始作业时,绞车需要切换到恒张力牵引状态,缆绳的张力保持在恒定的范围以内,实际的张力值可以通过销轴传感器进行检测。当缆绳张力处于正常变化范围内,绞车不做收放缆动作,保持缆绳长度不变。当张力大于设定值后,控制系统发出报警,同时快速放缆一定绳长,将张力降低至设定值以内。
变频器通信FC62用于PLC与变频器进行通信,变频器控制FC63用于变频器控制字的每一位进行定义。变频器的主要参数设置见表1,电机控制采用直接转矩控制,可以实现电机转速和转矩的高精度控制。现场总线的输入数据为16位的状态字和实际值,现场总线的输出数据为16位的控制字和给定值。

表1 变频器主要参数设置
2.3 画面设计
画面主页面见图5,主要包括主页面、报警页面和设置页面,能实时监控控制系统的状态。主页面主要含有A架、绞车和系统的参数信息。A架信息包括液压油箱的温度和液位、液压系统压力、电机启停状态、A架变幅角度、油缸位移偏差和操作手柄状态等。绞车信息包括绞车绳速、张力、电机的转速、转矩和电流、刹车状态和控制模式选择等。系统信息包括重载允许、试灯、启泵位置和操作位置等。报警页面记录了系统的报警数据,用于提示报警、方便查询和处理报警故障。设置页面主要用于设置系统参数,如绞车最大圈数设置和比例阀参数设置等。
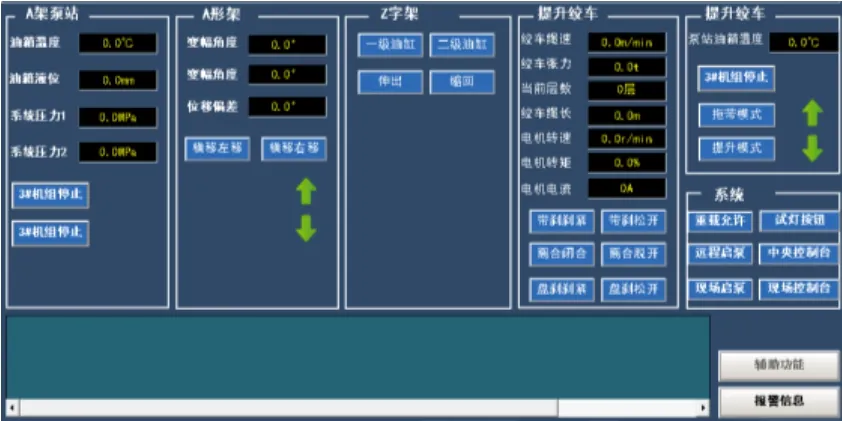
图5 画面主界面
3 结论
本文设计1套海底挖沟机吊放控制系统,详细设计控制系统的硬件、软件和画面,并在实船上进行挖沟铺管作业试验。试验结果表明:该控制系统能有效地满足功能需求,系统运行稳定可靠,可为类似的吊放装置控制系统的研制提供参考。
