基于视觉图像的水利工程隐患检测方法
2022-10-25周志美
王 剑,周志美
(1.江西省水利科学院,江西 南昌 330029;2.抚州港辉水利建筑有限公司,江西 抚州 334000)
随着视觉图像处理技术的发展,采用视觉图像分析方法建立水利工程的隐患检测模型。通过分析水利工程的视觉特征参数,结合对水利工程的红外遥感视觉特征分析,采用力学参数和视觉空间重构的方法,实现对水利工程的缺陷和隐患检测,提高水利工程隐患排除的智能检测和分析能力。相关的水利工程隐患检测和排除方法研究在水利工程的运维管理中具有重要意义。
当前,对水利工程隐患检测方法主要有机器视觉的特征分析方法[1]、模糊预应力特征分析方法、光谱分析方法以及红外检测方法等[2],其中,基于多尺度输入图像渗透模型的桥梁裂缝检测方法[3],使用加权分段函数进行图像对比度增强,通过最佳阈值分割滤除大部分非裂缝区域;通过视觉多尺度分解,实现桥梁裂缝检测,但该方法进行水利工程隐患检测的特征辨识能力不好。基于双目立体视觉技术的桥梁裂缝测量系统[4],采用相机标定、图像匹配、三维坐标计算等双目立体视觉技术对桥梁裂缝的宽度和长度进行计算;采用模糊度特征提取,实现桥梁工程裂缝检测,但该方法进行桥梁隐患检测的精密度不高,单目测量性能不好。针对上述问题,本文提出基于视觉图像的水利工程隐患检测方法。首先采用红外遥感探测技术提取水利工程隐患部位的视觉图像特征参数;然后在沿梯度方向求得水利工程缺陷部分为变质层次特征参量,通过疲劳裂纹视觉特征重构,采用机器视觉重组,实现水利工程的隐患优化检测;最后进行实验测试,展示了本文方法在提高水利工程隐患检测能力方面的优越性能。
1 水利工程隐患检测系统
1.1 水利工程隐患检测系统构成
为了实现基于视觉图像的水利工程隐患检测,基于灰度图像处理的方法,建立水利工程隐患排除的二维图像分析模型,结合水利工程隐患特征的异常标定,采用模板匹配的方法,分析灰度特征点分布位置的隐患特性[5];采用工件本构模型参数分析,结合水利工程工件材料的形变、相变参数分析;采用旋转不变矩检测的方法,结合应力参数分析和光学视觉特征分析,建立水利工程隐患检测的参数采集模型。在光学传感器下建立水利工程隐患视觉成像模型,提取水利工程雨水冲刷的痕迹或者人为的印迹,通过对光学特征分析和视觉参数分析,采用动态视觉特征分析,建立单位像素尺度分析模型。基于视觉特征分析,通过仿射变换和特征提取[6],在平移、旋转、缩放、剪切等一系列原子变换下实现视觉跟踪识别。采用连续小波变换,构建水利工程隐患的机器视觉图像采集模型,通过微观组织的特征分析进行水利工程隐患的视觉观察,在单背景约束下,分析水利工程隐患的表面光泽点,采用3×3平滑滤波模板检测的方法,提取水利工程隐患部位的视觉动态参数。通过拉普拉斯-高斯(Laplacian-Gauss,LoG)算子进行边缘检测,通过窗内像素梯度特征分析,得到水利工程隐患部位的机器动态视觉特征投影模板为((x,y),(x,y′)),引入投影误差,使得裂缝的轮廓与背景区域分割,得到水利工程隐患检测如图1所示。

图1 水利工程隐患自动检测的总体实现结构
根据图1所示的水利工程隐患检测总体结构,基于小波和Radon变换的方法,建立水利工程隐患视觉图像配准技术和SIFTI(Scale-invariant Feature Transform,尺度不变特征转换)模型,统计裂缝地图中灰度值为0的个数为G,其中gi=(gix,giy,giz)(i=0,…Ng-1)为核函数G中的第i个顶点,通过热-力耦合和塑性变形特征分析,得到水利工程隐患检测的二维平面图像映射模型,如图2所示。
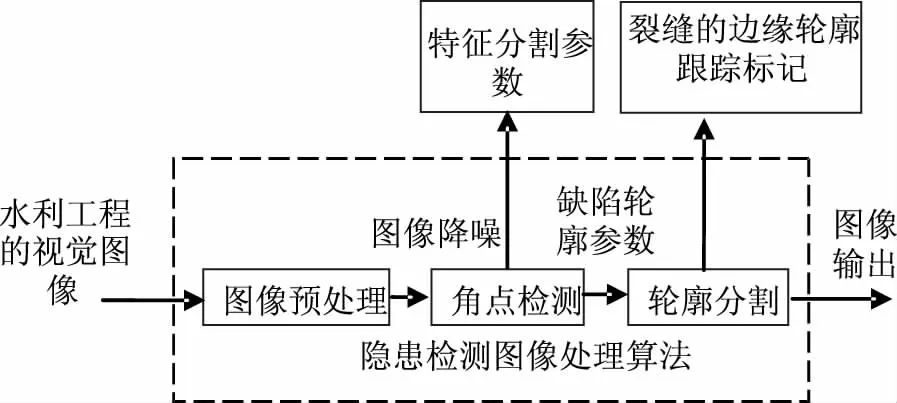
图2 水利工程隐患检测的二维平面图像映射模型
根据上述分析,采用红外遥感探测技术提取水利工程隐患部位的视觉图像特征参数,在多分辨背景下采用动态形变参数检测的方法,构建视觉图像对比度增强模型,通过最佳阈值分割,进行图像特征分解和视觉定位[7]。
1.2 水利工程隐患检测的图像预处理
基于最佳阈值分割的方法,分析水利工程隐患部位比如裂缝的梯度动态分布特征,研究水利工程的残余应力及变质层特性[8],基于模板网格化匹配,建立水利工程的隐患裂缝信息提取模型,网格分布如图3所示。

图3 水利工程隐患定位的网格配置示意图
在图3所示的网格模板分配结构图中,选取每个像素的实际面积,通过建立以DoG最大值/最小值为中心分块模型结构,统计裂缝地图中灰度值为0的个数sum,在隐患部位分布的坐标系(XPN,YPN)中,采用旋转不变矩检测的方法,得到水利工程隐患边缘点坐标(xk,yk),满足当xk>XPN时,水利工程隐患边缘特征值满足iL=iL+1;当xk (1) 由此,采用增强裂缝图像对比度的方法,结合模板匹配,建立水利工程图像的过程匹配和边缘特征分析模型[9]。 根据隐患部位的裂缝灰度差异分布,在沿梯度方向求得水利工程缺陷部分为变质层次特征参量。水利工程隐患视觉图像的模板核函数在视觉传感下通过对水利工程的结构纹形变、相变参数进行动态分析[10],得到单位时间内水利工程隐患部位的结构纹理信息为G(x,y;t)。在时域上进行水利工程图像的过程特征分析,采用平移动态参数分析的方法,得到水利工程隐患检测的传递函数,表示为: (2) 式中,φkl—不同尺度水利工程隐患部位的边缘像素值;θkl—不同尺度下的裂缝地图的相位特征;εi(t)—水利工程隐患部分的干扰特性信息。 直接将不同尺度的图像S(x,y)作为渗透模型的输人图像进行处理,得到边缘中心区域中的点集C∈S,采用最小二乘滤波,得到水利工程隐患视觉图像的尺度参数为: =-σ[Gx(x,y;t)i+Gy(x,y;t)j] (3) 根据上述分析,建立水利工程隐患特征提取模型,结合灰度边缘特征检测,进行水利工程隐患像素特征分解。 根据隐患部位的裂缝灰度差异分布,在沿梯度方向求得水利工程缺陷部分为变质层次特征参量。结合边缘特征分解,采用边缘像素渗透的方法,得到水利工程缺陷及隐患的渗透模型,渗透模型参数为F,水利工程隐患视觉图像的灰度值为P。采用Canny算子对相邻尺度图像之差S(x,y)-S(x,y)作特征分解,采用块特征匹配的方法,得到水利工程隐患部位的动态匹配像素值为f(x,y),对应的(p+q)阶谱特征量为: (4) 式中,M,N—水利工程的结构纹形变模板特征参数;xp、yq—水利工程隐患部位的归一化动态匹配特征量;f(x,y)—非裂缝区域的模板函数;p,q—待渗透区域和已渗透区域的像素值。 根据上述算法设计,通过疲劳裂纹视觉特征重构,采用机器视觉重组,实现对水利工程缺陷及隐患的渗透模型检测和裂缝定位,实现流程如图4所示。 图4 算法的实现流程 建立水利工程隐患检测仿真实验的开发环境为Matlab R2009a。采用标准误差约束的方法,进行隐患检测的可靠性分析,水利工程隐患检测的图像成像像素为200×250像元,模板匹配的分辨率为0.24mm,干扰信噪比为-15dB,采集图像的相关参数分见表1。 表1 图像参数分布 根据表1的参数设定,进行水利工程隐患检测仿真实验,得到水利工程的隐患部位裂缝分布如图5所示。 图5 水利工程的隐患部位裂缝分布 根据图5的裂缝视觉图像采集结果,进行视觉特征分析和定位,得到3个裂缝的模板匹配值:15×15,灰度直方图的分布窗口W=1.5s,裂缝的分布尺度σ=0.42,由此实现水利工程的隐患定位,得到定位检测结果如图6所示。 分析图6得知,本文方法能有效实现对水利工程的隐患自动定位。测试定位检测精度,得到对比结果如图7所示,分析图7得知,本文方法的检测精度更高,提高了水利工程隐患检测的智能化水平。 图6 隐患定位结果 图7 检测性能对比 本文所建立水利工程隐患检测方法具有检测精度高、检测手段方便、检测成果显示清晰等优势。但该方法由于数据分析成果是基于水利工程建构筑施工材料的变质层次特征参量,而水利工程建构筑物类型区域多样,本文所建立的评价模型较为单一,不能适用于金属等其他类型水利工程设施,从而制约了其推广应用性。在进行图像采集时,该检测方法使用的是红外波段的信号收集器,如检测区域存在较大的信号干扰或检测对象对于红外波段有较强吸附能力时,检测数据将出现失真。针对上述问题,研究人员将进一步深入研究广泛收集分析评价模型数据,改进信号收集装置,进而提高该检测方法的适用性。
2 水利工程隐患检测优化实现
2.1 水利工程隐患特征提取



2.2 水利工程隐患检测图像输出

3 实验测试




4 结语
